Вам также может понравиться
- analise 22Документ26 страницanalise 22MARCELO ADRIANO DUARTОценок пока нет
- Analise Estrutural I - Encontro IVДокумент32 страницыAnalise Estrutural I - Encontro IVJason SmithОценок пока нет
- Aula Teórica 04 22.23 Cinemática Da Rotação em Torno de Eixo FixoДокумент3 страницыAula Teórica 04 22.23 Cinemática Da Rotação em Torno de Eixo FixoZé engenheiroОценок пока нет
- TensoresДокумент42 страницыTensoresTadeu Fernando100% (1)
- Elasticidade Barra ChataДокумент25 страницElasticidade Barra ChataMurillo de SouzaОценок пока нет
- Provas de Estruturas 2019-2020Документ9 страницProvas de Estruturas 2019-2020BEATRIZ DA COSTA FERNANDESОценок пока нет
- Torção em Barras CircularesДокумент6 страницTorção em Barras CircularesDiego AlmeidaОценок пока нет
- Aula IV PotenciometroДокумент12 страницAula IV PotenciometroadrianofpОценок пока нет
- Potenciômetro: O que é e como funciona divisor de tensãoДокумент12 страницPotenciômetro: O que é e como funciona divisor de tensãoliloОценок пока нет
- Modelagem de lajes por grelhasДокумент10 страницModelagem de lajes por grelhasGETULIO VICENTE VIEIRA MENEZESОценок пока нет
- Aula 01Документ17 страницAula 01Hanza AssuateОценок пока нет
- MAC420 Aula3 2014Документ51 страницаMAC420 Aula3 2014Leonardo Riccioppo GarcezОценок пока нет
- Aula 1Документ37 страницAula 1LinoAntonioОценок пока нет
- VetoresДокумент34 страницыVetoresTiago GonzagaОценок пока нет
- Trabalho Torção Grupo3Документ26 страницTrabalho Torção Grupo3William MartinsОценок пока нет
- Aula3 - Cinematica - 1d - Fisd36 - 2023 v2Документ29 страницAula3 - Cinematica - 1d - Fisd36 - 2023 v2iangabrielmartinsОценок пока нет
- PaulaVilela InicCient 2006Документ25 страницPaulaVilela InicCient 2006Jeancarlo RibasОценок пока нет
- Deflexão de vigas e transporte públicoДокумент45 страницDeflexão de vigas e transporte públicoLana AbrantezОценок пока нет
- Teoria das Estruturas II - Bibliografia e Deformações em Estruturas IsostáticasДокумент65 страницTeoria das Estruturas II - Bibliografia e Deformações em Estruturas IsostáticasGláucio Ribeiro0% (1)
- Aula 3Документ39 страницAula 3Roque Alfredo Da Rosa AvilaОценок пока нет
- Rotacoes Dos Corpos Rigidos GabaritoДокумент18 страницRotacoes Dos Corpos Rigidos GabaritoLeonardo FarinaОценок пока нет
- Medição de grandezas elétricasДокумент45 страницMedição de grandezas elétricasAna RafaelaОценок пока нет
- 2018 SolidWorks - VigasДокумент4 страницы2018 SolidWorks - VigasLucas OliveiraОценок пока нет
- Quarta Lista de Exercicios 951831557Документ3 страницыQuarta Lista de Exercicios 951831557Jose Marcos Alecrim PereiraОценок пока нет
- Curvas de Capacidade E Dinâmica de Geradores SíncronosДокумент7 страницCurvas de Capacidade E Dinâmica de Geradores Síncronoscarloscamargo006Оценок пока нет
- Atividade Avaliativa 08 - Revisão Da TentativaДокумент5 страницAtividade Avaliativa 08 - Revisão Da TentativaCarol BandoliОценок пока нет
- Ae 11fqa Teste 1 f11 Versao 1Документ7 страницAe 11fqa Teste 1 f11 Versao 1Filipa Dinis50% (2)
- Entregable 1 Mecanica para IngenieriaДокумент11 страницEntregable 1 Mecanica para IngenieriaBrian HerreraОценок пока нет
- Teoria das Estruturas Aula 01 – Apresentação da DisciplinaДокумент45 страницTeoria das Estruturas Aula 01 – Apresentação da Disciplinajose airton chrisostomoОценок пока нет
- Curso Análise Estrutural 2Документ42 страницыCurso Análise Estrutural 2DIOGO FRANCO PUREZAОценок пока нет
- PDFДокумент189 страницPDFengenheiroalencarОценок пока нет
- 878564_Capítulo 9 - HibbelerДокумент36 страниц878564_Capítulo 9 - HibbelerCleber Pinheiro RamosОценок пока нет
- Aulas Práticas de Ciência de MateriaisДокумент40 страницAulas Práticas de Ciência de MateriaisMadalena AvillezОценок пока нет
- Apostila 03Документ32 страницыApostila 03Gui DiasОценок пока нет
- Teste 2 V1Документ2 страницыTeste 2 V1AnaОценок пока нет
- Introdução aos conceitos básicos de escoamentosДокумент54 страницыIntrodução aos conceitos básicos de escoamentosJosé JorgeОценок пока нет
- Instabilidade elástica barrasДокумент53 страницыInstabilidade elástica barrasfilipesilva_Оценок пока нет
- Aula 3Документ25 страницAula 3Lucas KangОценок пока нет
- Ligações Semi-Rigidas em EstruturasДокумент27 страницLigações Semi-Rigidas em Estruturasmvlxlx100% (1)
- Aula 03 Electrodinamica ClassicaДокумент39 страницAula 03 Electrodinamica ClassicaFernando ChiringoОценок пока нет
- Deflexao de Vigas e Eixos - MichelДокумент22 страницыDeflexao de Vigas e Eixos - MichelmichelbrunoОценок пока нет
- Introdução ao Método dos Elementos Finitos e Software SAP2000Документ45 страницIntrodução ao Método dos Elementos Finitos e Software SAP2000caiovalimОценок пока нет
- Dimensão de barras sob compressãoДокумент9 страницDimensão de barras sob compressãoleandro_rafaelОценок пока нет
- Paper Uso Del FDTD para Estudio de Cobertura Indoor y OutdoorДокумент69 страницPaper Uso Del FDTD para Estudio de Cobertura Indoor y OutdoordilceОценок пока нет
- Análise e Modelagem de Estruturas I PDFДокумент3 страницыAnálise e Modelagem de Estruturas I PDFMateus CamargoОценок пока нет
- Slides FísicaДокумент57 страницSlides FísicaTaila LimaОценок пока нет
- 11 +Processo+de+CrossДокумент53 страницы11 +Processo+de+CrossGllauber001Оценок пока нет
- TÓPICOS INTEGRADORES I - Webaula 2Документ39 страницTÓPICOS INTEGRADORES I - Webaula 2Daniel JuniorОценок пока нет
- Departamento de Física Cadeira de Electrodinâmica Clássica TAREFAS (De Aula Teórica 1 A 5)Документ3 страницыDepartamento de Física Cadeira de Electrodinâmica Clássica TAREFAS (De Aula Teórica 1 A 5)LinoAntonioОценок пока нет
- Sensores AutomotivosДокумент47 страницSensores AutomotivosCarlos FacilitesОценок пока нет
- Cinemática: posição, velocidade, aceleração e cálculo diferencialДокумент42 страницыCinemática: posição, velocidade, aceleração e cálculo diferencialLady CarvalhoОценок пока нет
- Análise de capacidade de carga de fundações profundas em perfis metálicosДокумент54 страницыAnálise de capacidade de carga de fundações profundas em perfis metálicosAna CruzОценок пока нет
- Introdução ao Método dos Elementos Finitos e Cálculo de Tensões em EstruturasДокумент53 страницыIntrodução ao Método dos Elementos Finitos e Cálculo de Tensões em EstruturasluisОценок пока нет
- Slide 3 Cinematica DiretaДокумент73 страницыSlide 3 Cinematica DiretaVlauber CostaОценок пока нет
- Avaliação II R MДокумент3 страницыAvaliação II R MMariela CamargoОценок пока нет
- Convertidor Boost: Funcionamiento y Cálculos del Circuito Elevador de TensiónДокумент6 страницConvertidor Boost: Funcionamiento y Cálculos del Circuito Elevador de TensiónUlises DelacruzОценок пока нет
- Livro Cálculo Diferencial e Integral IV - III UND PDFДокумент56 страницLivro Cálculo Diferencial e Integral IV - III UND PDFAndré Amaral Jr.Оценок пока нет
- Hibbeler Cap7Документ81 страницаHibbeler Cap7Sinoda SobrinomeОценок пока нет
- Processamento do Alumínio para LatasДокумент47 страницProcessamento do Alumínio para LatasClaudia Ester Duarte de SouzaОценок пока нет
- Laudo técnico detalha construção de 3 prédios comerciaisДокумент2 страницыLaudo técnico detalha construção de 3 prédios comerciaisDiogo Gonçalves Campinho0% (1)
- Projeto Norma BrasДокумент6 страницProjeto Norma BrasgyroskopienОценок пока нет
- Novos produtos PORSEG sistemas de segurançaДокумент24 страницыNovos produtos PORSEG sistemas de segurança2011PAULOPEREIRAОценок пока нет
- FIRECENTER - Catálogo de Cavaletes de Automação de Bomba de Incêndio 2017Документ15 страницFIRECENTER - Catálogo de Cavaletes de Automação de Bomba de Incêndio 2017Maurilio Batista de LimaОценок пока нет
- NBR-5752 - Indice de Atividade Pozolanica Cimento Portland Aos 28 DiasДокумент8 страницNBR-5752 - Indice de Atividade Pozolanica Cimento Portland Aos 28 DiasAbimael X VeronicaОценок пока нет
- IG1 - 9 - 4 - Portaria Nº 201, de 16 Abr 2007, SIMOBE (IG 20-07)Документ29 страницIG1 - 9 - 4 - Portaria Nº 201, de 16 Abr 2007, SIMOBE (IG 20-07)sandrofragosoОценок пока нет
- Pedro Marques Coelho Matricula - 2021214868 - Atividade3 - Ensaio de Durez e TermicosДокумент6 страницPedro Marques Coelho Matricula - 2021214868 - Atividade3 - Ensaio de Durez e Termicospedromarquescoelho20Оценок пока нет
- Esforço de flexão simples e tensõesДокумент20 страницEsforço de flexão simples e tensõesHugo CavalcanteОценок пока нет
- 01 Parafusos e Roscas - 2Документ26 страниц01 Parafusos e Roscas - 2miqueiasprataОценок пока нет
- Espesificaciones Tecnicas Tolva Hidraulicas.Документ49 страницEspesificaciones Tecnicas Tolva Hidraulicas.Tallersofia AutomotrizОценок пока нет
- Exercícios ResolvidosДокумент3 страницыExercícios ResolvidosanlumosoОценок пока нет
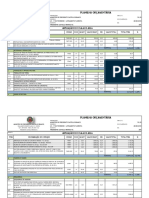
- Planilha OrçamentáriaДокумент6 страницPlanilha OrçamentáriaKant KandejaОценок пока нет
- TeoriaPlasticidadeElasticidadeTensõesДокумент27 страницTeoriaPlasticidadeElasticidadeTensõesFrancisco MachadoОценок пока нет
- Cuidados Con El HPLCДокумент47 страницCuidados Con El HPLCJardson Ramos SilvaОценок пока нет
- Drywall - Chapas, Perfis, Suportes e Acessórios - Aplicação Drywall - DrywallДокумент7 страницDrywall - Chapas, Perfis, Suportes e Acessórios - Aplicação Drywall - DrywallandrelalОценок пока нет
- Cartilha de MachosДокумент19 страницCartilha de MachosFernandoОценок пока нет
- Mapa - Automação Industrial - 542023Документ5 страницMapa - Automação Industrial - 542023jiroro4808Оценок пока нет
- Capítulo 3, Unidade II - Revolução Industrial - NEMДокумент2 страницыCapítulo 3, Unidade II - Revolução Industrial - NEMMARCELA ADRIANA GRANDIОценок пока нет
- Ferramentas Diamantadas para Afiação e AcabamentoДокумент2 страницыFerramentas Diamantadas para Afiação e AcabamentoThiago GomesОценок пока нет
- ABPE P004-1998 - Execução de Solda de Topo Por TermofusãoДокумент12 страницABPE P004-1998 - Execução de Solda de Topo Por TermofusãoUgoRibeiroОценок пока нет
- Relatório 1 - Recristalização e SublimaçãoДокумент7 страницRelatório 1 - Recristalização e SublimaçãoNetto SantosОценок пока нет
- NR 24 checklistДокумент3 страницыNR 24 checklistAdony AmorimОценок пока нет
- Ensaio de tração para determinar o módulo de elasticidade de liga de alumínioДокумент4 страницыEnsaio de tração para determinar o módulo de elasticidade de liga de alumínioThyago AmaralОценок пока нет
- Instalação e cálculo de carga térmica para ar condicionadoДокумент4 страницыInstalação e cálculo de carga térmica para ar condicionadoMárcio BussОценок пока нет
- Regimantal Sociologia 3trimДокумент7 страницRegimantal Sociologia 3trimCAMILLA DE LOURDES BUZINARO SILVAОценок пока нет
- Apostila Prof. Areias NettoДокумент176 страницApostila Prof. Areias NettoPaulo Dias100% (1)
- FGV 2012 CBM Ma Soldado Do Corpo de Bombeiro Musico ProvaДокумент14 страницFGV 2012 CBM Ma Soldado Do Corpo de Bombeiro Musico ProvaLucas FreitasОценок пока нет
- Soluções de rolamentos para máquinas agrícolasДокумент15 страницSoluções de rolamentos para máquinas agrícolasFlavioОценок пока нет
- ASB CEAPES Modulo 7 Atividades Apostila Lidiane T217Документ8 страницASB CEAPES Modulo 7 Atividades Apostila Lidiane T217Lidiane Wandrofski Fagundes100% (1)