Вам также может понравиться
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Seminar Report On I VtecДокумент12 страницSeminar Report On I VtecAmar KeniОценок пока нет
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5795)
- Project SynopsisДокумент6 страницProject SynopsisAmar KeniОценок пока нет
- Traction Control System (Topic Seminar Paper)Документ15 страницTraction Control System (Topic Seminar Paper)Vijay Shivakumar93% (14)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- "Traction Control Systems": Seminar OnДокумент7 страниц"Traction Control Systems": Seminar OnAmar KeniОценок пока нет
- SEMINAR On Ceramic BrakesДокумент4 страницыSEMINAR On Ceramic BrakesAmar KeniОценок пока нет
- Wheel Loader 721F SpecsДокумент10 страницWheel Loader 721F SpecsLuis LadinoОценок пока нет
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Car Bibles - The Car Suspension BibleДокумент20 страницCar Bibles - The Car Suspension BibleBruno Ramos100% (4)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- Excavator: Engine Gross Power Operating Weight Bucket CapacityДокумент16 страницExcavator: Engine Gross Power Operating Weight Bucket Capacitythiha 1994100% (1)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- AR27.10-P-0500CWX - R&R TransmissionДокумент9 страницAR27.10-P-0500CWX - R&R TransmissionjarobenОценок пока нет
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- 00 EP Lubricant ManuualДокумент50 страниц00 EP Lubricant Manuualpln up3Оценок пока нет
- Purge System FunctionДокумент5 страницPurge System FunctionRSS RSSОценок пока нет
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- 0-Development of New Hybrid ExcavatorДокумент9 страниц0-Development of New Hybrid ExcavatorPhanHathamОценок пока нет
- L40B L45B Specsheet GB 21 3 430 5594Документ6 страницL40B L45B Specsheet GB 21 3 430 5594Adrian Constantin MihalacheОценок пока нет
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- SiguranteДокумент9 страницSiguranteDaniel Sosa100% (2)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- List of GM Engines: Divisions Automotive Gasoline EnginesДокумент8 страницList of GM Engines: Divisions Automotive Gasoline EnginesrobertoОценок пока нет
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- Miche-Impa m19 EN PDFДокумент224 страницыMiche-Impa m19 EN PDFGiuseppe GalliОценок пока нет
- Ackermann Power SteeringДокумент62 страницыAckermann Power SteeringDeepak SawantОценок пока нет
- Hyundai Revision IntervalДокумент2 страницыHyundai Revision IntervalMr.JohnОценок пока нет
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- 2 SeatДокумент20 страниц2 Seatalex generalОценок пока нет
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- BMW 740i 7-Series (E38) (1996 - 2001)Документ12 страницBMW 740i 7-Series (E38) (1996 - 2001)IgorIlnickijОценок пока нет
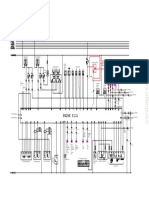
- Circuit Diagram 2.4 AT - Chery Tiggo T11Документ1 страницаCircuit Diagram 2.4 AT - Chery Tiggo T11limadacarlos67% (3)
- Visit ReportДокумент6 страницVisit ReportKamrun PromaОценок пока нет
- Discussion Assignment Unit 1Документ2 страницыDiscussion Assignment Unit 1Jim OdumbeОценок пока нет
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- 212-10153208 - APL-6324 - 31-03-2021 Eje TRASEROДокумент26 страниц212-10153208 - APL-6324 - 31-03-2021 Eje TRASEROLucas ScioscioliОценок пока нет
- Demontare-Montare Arc VariatorДокумент5 страницDemontare-Montare Arc VariatorcristianОценок пока нет
- Snorkel Ab50jДокумент226 страницSnorkel Ab50jhugoamendozaОценок пока нет
- BOSCH FUEL INJECTOR List-Fuel Injectors PDFДокумент47 страницBOSCH FUEL INJECTOR List-Fuel Injectors PDFEd Morales100% (3)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- ENR - FM.HSE.16 Hoise CraneДокумент1 страницаENR - FM.HSE.16 Hoise CraneEKO PRIBADIОценок пока нет
- Usa Super SHIFTER 175cc: (Max 176.6 CM )Документ28 страницUsa Super SHIFTER 175cc: (Max 176.6 CM )yasith madhukaОценок пока нет
- Rule: Motor Vehicle Safety Standards: Glazing Materials— Low-Speed Vehicles CorrectionДокумент12 страницRule: Motor Vehicle Safety Standards: Glazing Materials— Low-Speed Vehicles CorrectionJustia.comОценок пока нет
- Hawker 800xp 199. XA-MJA. SN-258331Документ9 страницHawker 800xp 199. XA-MJA. SN-258331Jhon Alvaro MujicaОценок пока нет
- Gta San Andreas CheatsДокумент3 страницыGta San Andreas CheatsMihai DumitrascuОценок пока нет
- Data Sheet LEO50GTДокумент2 страницыData Sheet LEO50GTMelissa BrownОценок пока нет
- Carburetor Troubleshooting Repair Guide For HondaДокумент9 страницCarburetor Troubleshooting Repair Guide For HondaRoyal EОценок пока нет
- Joyce James UliseДокумент84 страницыJoyce James UlisesebastienfiliОценок пока нет