Академический Документы
Профессиональный Документы
Культура Документы
Esta Bili Dad
Загружено:
MartinАвторское право
Доступные форматы
Поделиться этим документом
Поделиться или встроить документ
Этот документ был вам полезен?
Это неприемлемый материал?
Пожаловаться на этот документАвторское право:
Доступные форматы
Esta Bili Dad
Загружено:
MartinАвторское право:
Доступные форматы
INGENIERÍA ELÉCTRICA ANÁLISIS DE ESTABILIDAD TRANSITORIA.
UNIDAD 2
ANÁLISIS DE ESTABILIDAD
TRANSITORIA.
2.1 CONCEPTOS BÁSICOS DE ESTABILIDAD TRANSITORIA.
Por muchos años, las consideraciones de estabilidad han sido admitidas como una parte esencial
de la planeación y operación de los Sistemas Eléctricos de Potencia (S.E.P.), pero debido al
crecimiento de los sistemas y a la dificultad de satisfacer sus objetivos, actualmente existe la
necesidad de que los Ingenieros de Sistemas de Potencia le pongan mayor atención y esfuerzo para
resolver los problemas inherentes con la estabilidad. La interconexión de los S.E.P. ha ocasionado
incremento en consecuencias (no deseables) de inestabilidad y complican los procesos analíticos
para la operación adecuada de los sistemas. La interconexión también mejora la confiabilidad del
sistema a través del soporte mutuo en condiciones de emergencia; sin embargo, esta mejora en la
confiabilidad se realiza solamente si los sistemas de transmisión de potencia permanecen intactos
en condiciones de emergencia.
Algunos sistemas interconectados presentan problemas de inestabilidad dinámica y la gran
mayoría, son afectados por oscilaciones que generalmente son amortiguadas por ellos mismos.
Estas oscilaciones pueden ocurrir espontáneamente ó ser producidas por algún disturbio, y en
ocasiones se incrementan en magnitud ocasionando la separación del sistema. Uno de los motivos
importantes que origina este comportamiento, es la transmisión de potencia a grandes distancias.
Los enlaces existentes entre los centros de generación y las áreas de carga son tan grandes que el
intercambio de potencia se realiza con grandes desplazamientos angulares entre los generadores
remotos y aquellos que se encuentran cercanos a los centros de carga. El resultado de todo ello es
tener capacidad reducida para sincronizar el flujo de potencia entre los grupos de máquinas y bajas
frecuencias naturales de oscilación que son pobremente amortiguadas.
M.C. J.L. LEMUS D. SISTEMAS ELÉCTRICOS DE POTENCIA.
143
INGENIERÍA ELÉCTRICA ANÁLISIS DE ESTABILIDAD TRANSITORIA.
El objetivo de un S.E.P., es proporcionar al usuario servicio confiable, eficiente y de buena
calidad. Para cumplir este objetivo, el sistema se diseña bajo un estándar de confiabilidad para
diferentes condiciones de operación con cambios normales, tales como conexión o desconexión de
cargas, cambio de configuración de la red, o bien cambios imprevistos producidos por
contingencias. Entonces para analizar la seguridad del S.E.P. y diseñar adecuadamente los sistemas
de control que ayuden a cumplir los objetivos del sistema, es útil clasificar las condiciones de
operación en los siguientes estados: normal, alerta, emergencia, emergencia extrema y
restablecimiento. La figura 2.1 muestra estos estados de operación y la forma en la cual se realiza
la transición entre ellos.
Fig. 2.1. Estados de operación de un S.E.P.
En estado normal, todas las variables del S.E.P. están dentro del rango de operación normal
preestablecido y ningún equipo se encuentra sobrecargado. Entonces, el sistema está operando en
condiciones seguras y puede soportar una contingencia sin violar alguna de las restricciones.
M.C. J.L. LEMUS D. SISTEMAS ELÉCTRICOS DE POTENCIA.
144
INGENIERÍA ELÉCTRICA ANÁLISIS DE ESTABILIDAD TRANSITORIA.
El S.E.P. entra a un estado de alerta si los niveles de seguridad caen bajo cierto límite adecuado de
operación. En este estado, todas las variables del sistema se mantienen dentro del rango aceptable
de operación y todas las restricciones se satisfacen. Sin embargo, el S.E.P. se ha debilitado y se
encuentra en un nivel en donde una contingencia puede ocasionar que algunos equipos se
sobrecarguen y que el sistema caiga a un estado de operación de emergencia.
Si el disturbio es muy severo, el S.E.P. puede caer a un estado de emergencia extrema
directamente del estado de alerta. En este estado, existen bajos voltajes en varios buses y/o tener
equipos en condiciones de capacidad de emergencia excedida. El S.E.P. aún está intacto y puede
regresar al estado de alerta iniciando acciones de control de emergencia, tales como: eliminación
de la falla, control de excitación, valvuléo rápido, desconexión de generación, etc.
Cuando el S.E.P. se encuentra en estado de emergencia extrema, resultan desconexiones en
cascada de líneas de transmisión y la posibilidad de que el sistema se parta o pierda su condición
estable, creando islas eléctricas que de alguna manera ayudan a recuperar la gran mayoría del
sistema, evitando así tener un problema mayor debido a acciones de control tales como:
desconexión de carga y tener controlada la separación del Sistema.
El estado de restablecimiento del sistema se tiene cuando éste pierde estabilidad y representa una
condición en la cual las acciones de control son reconectar todas las partes que lo constituyen para
poder restablecer la carga.
El término estabilidad se aplica en S.E.P. para denotar una condición en la cual varias máquinas
síncronas del sistema permanecen en sincronismo, o “en paso” (equilibrio). Por el contrario, el
término inestabilidad, denota una condición de pérdida de sincronismo o que las máquinas se
encuentran “fuera de paso” (desequilibrio). Este aspecto de estabilidad-inestabilidad está
influenciado por la dinámica de los ángulos de los rotores de las máquinas síncronas y por las
relaciones potencia-ángulo, mostradas en la figura 2.2
El estado de equilibrio puede ser perturbado por diferentes causas, entre las cuales se pueden
mencionar las siguientes:
M.C. J.L. LEMUS D. SISTEMAS ELÉCTRICOS DE POTENCIA.
145
INGENIERÍA ELÉCTRICA ANÁLISIS DE ESTABILIDAD TRANSITORIA.
Fig. 2.2. Relación Potencia-ángulo.
Variaciones periódicas en el par aplicado a los generadores, lo que trae como consecuencia
variaciones en el voltaje y en la frecuencia del sistema, ocasionando que algunos motores se
salgan de sincronismo.
Incremento repentino de carga.
Incremento repentino en la reactancia de la red, ocasionado por la desconexión de una o más
líneas.
Pérdida repentina de generación.
Falla trifásica o cortocircuito en el Sistema.
El propósito de este tema es mostrar la gran cantidad de fenómenos dinámicos que ocurren en un
S.E.P., describiendo las características que permitan clasificarlos y elegir el modelo adecuado de
los elementos que intervienen. También se presentan alternativas de solución al problema
dinámico, recomendándose una de las que actualmente presenta mejor perspectiva.
Frecuentemente, se habla del estado permanente de un S.E.P., como una condición de operación
del sistema en donde todas las cantidades físicas que lo caracterizan, pueden ser consideradas
como constantes para propósitos de análisis.
M.C. J.L. LEMUS D. SISTEMAS ELÉCTRICOS DE POTENCIA.
146
INGENIERÍA ELÉCTRICA ANÁLISIS DE ESTABILIDAD TRANSITORIA.
Sin embargo, en el sentido estricto de la palabra esta condición nunca existe, ya que siempre se
tienen cambios continuos en el sistema, tanto normales (variaciones de carga) como anormales
(fallas). A todos estos cambios se les considera como el cambio de un estado de equilibrio a otro
periodo dinámico de transmisión; donde se puede tener pérdida de sincronismo o pueden surgir
oscilaciones no amortiguadas en las líneas de transmisión, originando su desconexión.
El comportamiento dinámico del S.E.P. para diferentes situaciones cubre un gran espectro de
fenómenos eléctricos, electromecánicos y termodinámicos. Por ello, el análisis y la formulación
general es compleja, debido a que intervienen cientos de elementos agrupados en áreas y
subsistemas, que interactúan entre ellos, tales como: generadores, primo-motores, excitadores, etc.
La figura 2.3 muestra una representación de los elementos de una unidad generadora y la figura 2.4
muestra una representación en bloques de los elementos de un S.E.P. y su interconexión,
incluyendo la red, la carga, la fuente de generación, la fuente de control y su interconexión. El
gobernador sensa la velocidad de la inercia mecánica y corrige cualquier diferencia con respecto a
la velocidad síncrona (s), ajustando la posición de la válvula del vapor (o del agua).
Fig. 2.3. Elementos básicos de una unidad generadora.
M.C. J.L. LEMUS D. SISTEMAS ELÉCTRICOS DE POTENCIA.
147
INGENIERÍA ELÉCTRICA ANÁLISIS DE ESTABILIDAD TRANSITORIA.
La máquina prima mueve el rotor de la máquina síncrona produciendo un par mecánico (Tm) en
dirección de rotación, el cual es controlado por el flujo de vapor (o de agua) que entra a la turbina.
El campo magnético producido por el devanado del rotor (campo) induce en el devanado de
armadura (estator) corrientes alternas que alimentan la carga o al sistema al cual está conectado.
La frecuencia de las corrientes inducidas en el estator depende de la velocidad del rotor; por ej., la
frecuencia eléctrica está sincronizada con la velocidad mecánica, siendo esta la razón por la cual se
le asigna el nombre de “máquina síncrona”.
Fig. 2.4. Interacción entre subsistemas para análisis dinámico.
El arreglo físico del devanado del estator es tal, que las corrientes que circulan en sus tres fases
producen un campo magnético resultante (campo magnético giratorio) que gira a la misma
velocidad que el rotor. Los campos magnéticos del rotor y del estator interactúan entre ellos, dando
como resultado la producción del par electromagnético (Te). Este par es igual y opuesto al par
mecánico (Tm) que debe de ser aplicado por la máquina prima para mantener la rotación. La
potencia eléctrica (Pe) que entrega el generador se cambia solamente cambiando la potencia
mecánica (Pm) que se le proporciona a la máquina prima. El efecto que se tiene al incrementar
la potencia mecánica es de avanzar el rotor a una nueva posición relativa con respecto al
campo magnético giratorio del estator.
M.C. J.L. LEMUS D. SISTEMAS ELÉCTRICOS DE POTENCIA.
148
INGENIERÍA ELÉCTRICA ANÁLISIS DE ESTABILIDAD TRANSITORIA.
En caso contrario, una reducción de la potencia mecánica retrasa al rotor; en otras palabras, el
ángulo del rotor con respecto al campo giratorio determina la cantidad de potencia eléctrica que
entrega el generador.
La figura 2.2 muestra una relación típica de la potencia eléctrica de una máquina síncrona y la
posición angular de su rotor con respecto al rotor de otra máquina a la que suministra potencia a
través de una red de transmisión. Cuando el ángulo es cero, no existe transferencia de potencia y
cuando el ángulo se incrementa, la potencia también se incrementa hasta un valor máximo (Pmáx).
Después de cierto ángulo (normalmente 90º), un incremento adicional en el ángulo debido a un
incremento en la Pm, resulta en una reducción de la potencia eléctrica transmitida; esto incrementa
la velocidad del rotor e incrementa el ángulo con una reducción de la Pe. Generalmente, este
fenómeno se conoce como “pérdida de sincronismo”.
La magnitud de la potencia máxima transmitida entre dos máquinas, es directamente proporcional
a los voltajes internos de las máquinas e inversamente proporcional a la reactancia de la red de
transmisión que interconecta a las dos máquinas. Cuando existen más de dos máquinas, los
desplazamientos angulares relativos afectan el intercambio de potencia en una forma similar que
para el caso de dos máquinas.
Bajo condiciones de operación normal, todas las máquinas se encuentran en sincronismo, esto es,
todas tienen la misma velocidad promedio, y el objetivo será mantener equilibrio entre la potencia
mecánica (o Tm) y la potencia eléctrica (o Te) de cada máquina manteniendo velocidad constante.
Si el sistema es perturbado, entonces se pierde este equilibrio, cambiando la aceleración o
desaceleración de los rotores de las máquinas de acuerdo a las leyes de movimiento de un cuerpo
en rotación, lo cual se analizará más adelante. Si un generador gira temporalmente más rápido que
otro, avanzará la posición relativa de su rotor con respecto a la máquina que gira más lento;
entonces, la diferencia angular resultante transfiere parte de la carga de la máquina más lenta hacia
la máquina más rápida, dentro de los límites dependientes de la relación potencia-ángulo. Para
cualquier situación determinada, la estabilidad del sistema depende de que las desviaciones en las
posiciones angulares de los rotores den o no como resultado suficientes pares de restablecimiento.
M.C. J.L. LEMUS D. SISTEMAS ELÉCTRICOS DE POTENCIA.
149
INGENIERÍA ELÉCTRICA ANÁLISIS DE ESTABILIDAD TRANSITORIA.
Debido a que la red de transmisión es el medio por el cual fluye la potencia entre los generadores y
las cargas y entre los diferentes generadores; entonces, ésta es el primer factor que influye en la
estabilidad del sistema. Sin embargo, las características de las unidades generadoras y de sus
controles también tienen efectos muy significativos en la estabilidad, como se puede apreciar en la
figura 2.5, la cual muestra los controles asociados con cada uno de los subsistemas del S.E.P.
Fig. 2.5. Subsistemas de un SEP y sus controles asociados.
Debido a que los elementos de un S.E.P. no responden de igual manera a un mismo estímulo, es
posible hacer simplificaciones en el problema de estudio, representando con detalle los elementos
con mayor efecto en el fenómeno investigado y simplificando o eliminando los elementos con
menor influencia en el fenómeno.
Una subdivisión de la representación dinámica de los S.E.P., de acuerdo a la respuesta y a la
interrelación de los elementos que intervienen durante el proceso dinámico, es la siguiente:
M.C. J.L. LEMUS D. SISTEMAS ELÉCTRICOS DE POTENCIA.
150
INGENIERÍA ELÉCTRICA ANÁLISIS DE ESTABILIDAD TRANSITORIA.
Máquina eléctrica y controles de excitación.
Sistema gobernador y control automático de generación.
Sistema alimentador de energía y los controles.
Cada elemento del sistema eléctrico responde con diferente rapidez ante un estímulo, la cual
depende de la constante de tiempo de los elementos. Además, para seleccionar los elementos que
responden durante un tiempo de estudio, es necesario conocer los rangos de tiempo en que se
desarrolla dicho estudio, modelando en detalle los que influyen determinantemente, despreciando
aquellos que por su lentitud no tienen influencia en el fenómeno y simplificando la representación
de los que se consideran con efectos mínimos en la rapidez de su respuesta.
La figura 2.6 muestra una clasificación en escala logarítmica de diferentes estudios dinámicos en
S.E.P., de acuerdo al rango de estudio. Se observa que en estudios de estabilidad transitoria, se
desprecian los efectos transitorios de la red, la respuesta de la caldera y controles; pero se
representa con gran detalle la dinámica interna del generador, el sistema de excitación y la red en
estado permanente.
Fig. 2.6. Clasificación de estudios dinámicos de acuerdo al rango de tiempo de estudio.
M.C. J.L. LEMUS D. SISTEMAS ELÉCTRICOS DE POTENCIA.
151
INGENIERÍA ELÉCTRICA ANÁLISIS DE ESTABILIDAD TRANSITORIA.
Es importante mencionar que la frecuencia natural de oscilación de los rotores de las máquinas
síncronas generalmente se encuentra en el rango de 0.1 hz hasta 2.5 hz. Entonces, el periodo de
tiempo para una “oscilación de ángulo” variará en casos extremos desde 0.4 seg. hasta 10 seg. Sin
embargo, la gran mayoría de los generadores síncronos tienen un periodo de tiempo desde 0.8 seg.
hasta 1.5 seg. para el estudio de estabilidad transitoria de primera oscilación.
CLASIFICACIÓN DE LOS ESTUDIOS DE ESTABILIDAD.
La primera clasificación de los estudios de estabilidad fue: estabilidad transitoria y estabilidad
de estado estable. El concepto clásico de estabilidad transitoria consistía en analizar la
primera oscilación de los generadores que incluía tiempos no mayores de un segundo. Los
estudios de estabilidad de estado estable, consistían en analizar el comportamiento del
desplazamiento angular de los rotores de las máquinas alrededor de un punto de operación
en estado estable. Posteriormente apareció el concepto de estabilidad dinámica, como la
transición entre la estabilidad transitoria y la de estado estable.
Aunado al crecimiento de los sistemas de potencia, aparecieron mejores estudios, métodos de
análisis, simulación de nuevos equipos y el uso de modelos más sofisticados, los cuales cambiaron
los conceptos teóricos sobre estabilidad de S.E.P., ampliando y mejorando los criterios y
definiciones clásicas.
Existen diversos criterios para clasificar los estudios de estabilidad tomando como parámetros una
gran cantidad de factores como: el tipo y magnitud de la perturbación, tiempo de estudio, forma de
corregirlo, método de solución, etc.
Una clasificación más generalizada se indica a continuación:
b) Estabilidad transitoria.
b) Estabilidad dinámica.
b.1) Tiempo de estudio intermedio.
b.2) Tiempo de estudio largo.
M.C. J.L. LEMUS D. SISTEMAS ELÉCTRICOS DE POTENCIA.
152
INGENIERÍA ELÉCTRICA ANÁLISIS DE ESTABILIDAD TRANSITORIA.
a) Estabilidad Transitoria. Estos estudios tienen como objetivo analizar el sincronismo de los
generadores síncronos del S.E.P. para periodos de tiempo pequeño, el criterio de estabilidad
consiste en verificar si el desplazamiento angular relativo de los rotores de los generadores
no crece indefinidamente. El tiempo de estudio comprende desde el instante de la
perturbación hasta 2 seg. y en algunos casos se extiende hasta 5 seg.
Los modelos utilizados en estos estudios son: línea de transmisión en estado estable, generadores y
los controles de excitación con detalle que varían desde el más completo hasta la representación
clásica, algunos estudios incluyen el efecto de la turbina-gobernador y generalmente se desprecia
el efecto de la caldera. La figura 2.7 muestra una analogía de un sistema transitoriamente estable e
inestable.
Fig. 2.7. Analogías de un sistema transitoriamente estable-inestable.
El límite de estabilidad en estado transitorio, se refiere al máximo flujo de potencia
permisible a través de un punto de operación particular sin pérdida de estabilidad, cuando el
flujo de potencia es incrementado en forma repentina, ya sea por un incremento en la carga,
desconexión de líneas en alguna parte del sistema o por una falla trifásica.
b) Estabilidad Dinámica. Los estudios de estabilidad dinámica tienen como objetivo primario
analizar el comportamiento de la frecuencia del sistema, los tiempos de estudio pueden ser:
M.C. J.L. LEMUS D. SISTEMAS ELÉCTRICOS DE POTENCIA.
153
INGENIERÍA ELÉCTRICA ANÁLISIS DE ESTABILIDAD TRANSITORIA.
b.1) Intermedios. Los estudios dinámicos para periodos intermedios comprenden de
segundos a un minuto, el detalle del modelado es prácticamente el mismo que el de los estudios
transitorios, pero se incorpora la acción de relevadores y de otros equipos que responden durante
este periodo.
b.2) Grandes. Los estudios dinámicos para tiempos de estudio grandes comprenden tiempos
de estudio hasta de 20 minutos, se desprecian los efectos del transitorio eléctrico de los
generadores, utilizando modelos clásicos, pero modelando con detalle el primo-motor y los
controles. Las ecuaciones de la red se resuelven mediante formulaciones lineales. En general los
métodos de solución se simplifican al reducir los cálculos eléctricos del S.E.P., pero se incluyen
los efectos de los cambiadores automáticos de derivaciones de transformadores, corte de carga por
baja frecuencia, despacho de carga, maniobras de los operadores, etc. La figura 2.8 muestra una
analogía de un sistema en condiciones de estabilidad-inestabilidad de estado estable.
Fig. 2.8. Analogía de un sistema en condiciones de estabilidad-inestabilidad de
estado estable
El límite de estabilidad de estado estable, se refiere al máximo flujo de potencia permisible a
través de un punto de operación particular, cuando el sistema o parte del sistema no ha
perdido su estabilidad y el flujo de potencia es incrementado gradualmente.
M.C. J.L. LEMUS D. SISTEMAS ELÉCTRICOS DE POTENCIA.
154
INGENIERÍA ELÉCTRICA ANÁLISIS DE ESTABILIDAD TRANSITORIA.
CAUSAS QUE ORIGINAN INESTABILIDAD EN LOS SISTEMAS ELÉCTRICOS
DE POTENCIA.
Las causas de inestabilidad en los S.E.P. son originados por desbalances de potencia de los
siguientes tipos:
a) Potencia activa.
b) Potencia reactiva.
c) Potencia calorífica.
a) Desbalance de potencia activa. Los desbalances de potencia activa son originados por cambios
normales de potencia activa debidos a conexión o desconexión de cargas, pérdida de generación,
fallas, etc. Estos cambios se manifiestan por una aceleración o desaceleración en los rotores de los
generadores, cambiando la velocidad y el desplazamiento angular de los mismos. Las variables de
interés de estos estudios son el desplazamiento angular y/o la frecuencia, dependiendo de la
magnitud del cambio instantáneo de potencia activa.
b) Desbalance de potencia reactiva. Estos desbalances se deben a los requerimientos de potencia
reactiva del sistema, que al no poder ser satisfechos provocan variaciones de voltaje, que cambian
las características dinámicas de los elementos sensibles al voltaje, agravando el desbalance de
potencia reactiva y con la posibilidad de tener un colapso de voltaje.
Los desbalances de potencia reactiva pueden ser originados por fallas, switcheo de líneas,
desconexión de compensadores estáticos de vars (C.E.V.), generadores operando con factor de
potencia adelantado, etc.
c) Desbalance de potencia calorífica. Cuando el sistema opera con sobrecarga, circulan
corrientes que generan calor que algunas veces no puede ser disipado con la rapidez que se
produce, aumentando la temperatura de equipo como generadores, transformadores y líneas de
transmisión.
M.C. J.L. LEMUS D. SISTEMAS ELÉCTRICOS DE POTENCIA.
155
INGENIERÍA ELÉCTRICA ANÁLISIS DE ESTABILIDAD TRANSITORIA.
Al llegar a los límites térmicos de seguridad, operan los sistemas de desconexión, agravando las
condiciones de sobrecarga del sistema y por lo tanto de calentamiento del resto del equipo, que
puede provocar una desconexión en cadena.
2.1.1 CASO DE UN GENERADOR CONECTADO A UN BUS INFINITO.
El Sistema Eléctrico de Potencia está integrado por numerosas unidades generadoras y cargas
interconectadas por líneas de transmisión y transformadores (Red), como se muestra en la figura
2.9
Fig. 2.9. Diagrama esquemático de un Sistema Eléctrico de Potencia.
El estudio integral del comportamiento dinámico de un S.E.P. resulta sumamente complejo.
Aunado a la gran dimensión por el número de componentes que intervienen, se tiene la dificultad
de que una sola unidad generadora requiere de un número elevado de ecuaciones diferenciales para
la representación matemática de sus distintos elementos. Sin embargo, es posible abordar el
estudio de estabilidad simplificándolo con base a diversos criterios: el primero, consiste en reducir
al mínimo la dimensión y el segundo, en utilizar el menor número de ecuaciones para la
representación de sus componentes. Estas simplificaciones, a pesar de lo drástico que aparentan
ser, no distorsionan los conceptos fundamentales a que se busca hacer llegar.
M.C. J.L. LEMUS D. SISTEMAS ELÉCTRICOS DE POTENCIA.
156
INGENIERÍA ELÉCTRICA ANÁLISIS DE ESTABILIDAD TRANSITORIA.
La simplificación en las dimensiones consiste en suponer una máquina síncrona conectada a un
“gran sistema”, como se muestra en la figura 2.10. En realidad lo que se quiere decir es que las
unidades generadoras y la red del “gran sistema” son de un tamaño bastante mayor que la unidad
bajo estudio. Este “gran tamaño” relativo evita que eventos que ocurran en la máquina, o en la
red que une la maquina con el sistema, logren afectar el voltaje y la frecuencia del bus del sistema
al cual está conectada la máquina.
Fig. 2.10. Diagrama esquemático para justificar el concepto Máquina-Bus infinito.
Un equivalente a esta suposición es cuando un usuario se conecta al sistema eléctrico de la C.F.E.
Otro equivalente es cuando se sincroniza un pequeño generador síncrono de un laboratorio de
Tecnológico o Universidad al sistema eléctrico de la C.F.E.
La representación de la figura 2.10 se puede simplificar a la mostrada en la figura 2.11. La barra
con pequeñas líneas representa un bus cuyo voltaje y frecuencia permanecen constantes (bus
infinito). También se puede pensar como si fuera un enorme generador o todo un sistema
metropolitano.
M.C. J.L. LEMUS D. SISTEMAS ELÉCTRICOS DE POTENCIA.
157
INGENIERÍA ELÉCTRICA ANÁLISIS DE ESTABILIDAD TRANSITORIA.
Fig. 2.11. Diagrama esquemático de Máquina-Bus infinito.
De acuerdo a la clasificación que se presentó en el tema 2.1, en el área de la dinámica del
generador eléctrico y de los controles de excitación, el interés se centra en analizar la capacidad
que presente el sistema eléctrico de permanecer operando en sincronismo al ocurrir disturbios
severos, tales como: fallas que ocasionen disparos de líneas y transformadores, pérdidas repentinas
de unidades generadoras o de cargas grandes y cambios de configuración de la red de transmisión.
Para estos casos, los efectos más relevantes ocurren en el primer o primeros dos segundos.
Generalmente para el estudio de primera oscilación (primer segundo), no se requiere de una
representación detallada de los sistemas de excitación. Si el estudio se desea llevar más allá de un
segundo, es necesario modelar con mayor detalle los sistemas de excitación y los estabilizadores
de potencia.
En este tema se abordará el análisis de primera oscilación, mencionando que los parámetros que
tienen mayor influencia en el comportamiento dinámico del sistema son:
a) La reactancia y la inercia de generador.
b) La reactancia de la red de transmisión para las condiciones de pre-falla, falla y post-falla.
c) Los esquemas de subestaciones y los tiempos de operación de los interruptores.
d) Los esquemas de protecciones.
Obsérvese que en la lista de parámetros dominantes se omitió el sistema de excitación. Esto se hizo
porque se abordará el análisis de primera oscilación (primer segundo).
M.C. J.L. LEMUS D. SISTEMAS ELÉCTRICOS DE POTENCIA.
158
INGENIERÍA ELÉCTRICA ANÁLISIS DE ESTABILIDAD TRANSITORIA.
2.1.2 ECUACIÓN DE POTENCIA ELÉCTRICA-ÁNGULO.
Los cambios bruscos en la potencia eléctrica pueden surgir de varias clases de disturbios. Uno de
los más comunes son las fallas en líneas de transmisión. Antes de analizar estos cambios, es
conveniente determinar la ecuación de transferencia de potencia P- para un sistema de dos
máquinas.
Suponga el sistema elemental de la figura 2.12, formado por un generador síncrono suministrando
potencia a un motor síncrono a través de una línea con reactancia XLT. El circuito equivalente para
cada máquina puede representarse como una fuente de voltaje en serie con una reactancia, como se
muestra en la figura 2.12 (a).
Fig. 2.12. Sistema de dos máquinas para estudios de estabilidad transitoria.
Para el sistema de dos buses de la figura 2.12 (b), se tiene
Y Y12
YBUS 11 ; Y12 = Y21 (2.1)
Y21 Y22
donde: YBUS, en la matriz de admitancias de red. Entonces, la potencia compleja que entra a un
bus, en general es
M.C. J.L. LEMUS D. SISTEMAS ELÉCTRICOS DE POTENCIA.
159
INGENIERÍA ELÉCTRICA ANÁLISIS DE ESTABILIDAD TRANSITORIA.
Si Pi j Qi = Ei' Ii* (2.2)
En el bus 1, se tiene
E1' Y11 E1' E1' Y12 E'2
* * *
P1 j Q1 = E1' I1* E1' Y11 E1' Y12 E'2 (2.3)
donde
E1' E1' 1 ; E'2 E'2 2
(2.4)
Y11 = G11 + jB11 ; Y12 = Y12 12
Sustituyendo las ecuaciones (2.4) en la ecuación (2.3) y separando parte real e imaginaria, se
obtiene:
P1 = (E1' )2 G11 E1' E'2 Y12 Cos (1 2 12 ) (2.5)
Q1 = (E1' )2 B11 E1' E'2 Y12 Sen (1 2 12 ) (2.6)
haciendo:
= 1 2 ; = 12
2
(2.7)
PC = (E1' )2 G11 ; Pmáx = E1' E'2 Y12
Finalmente, sustituyendo las ecuaciones (2.7) en la ecuación (2.5), se obtiene la ecuación de
potencia eléctrica en función del ángulo (ángulo de potencia).
M.C. J.L. LEMUS D. SISTEMAS ELÉCTRICOS DE POTENCIA.
160
INGENIERÍA ELÉCTRICA ANÁLISIS DE ESTABILIDAD TRANSITORIA.
P1 = PC Pmáx Sen ( ) (2.8)
Si se desprecian las resistencias de los elementos de la matriz de red YBUS, 12 , resultando
2
E1' E'2
P1 = E1' E'2 Y12 Sen Sen Pmáx Sen (2.9)
Z12
Si se grafica la ecuación (2.9), se obtiene la característica de la figura 2.13
Fig. 2.13. Característica Potencia-ángulo correspondiente a un sistema de 2 máquinas.
2.1.3 ECUACIÓN DE OSCILACIÓN.
La ecuación que gobierna el movimiento del rotor de una maquina síncrona se basa en la segunda
Ley de Newton, la cual establece que el par de aceleración es igual al producto del momento de
inercia multiplicado por la aceleración angular, esto es:
M.C. J.L. LEMUS D. SISTEMAS ELÉCTRICOS DE POTENCIA.
161
INGENIERÍA ELÉCTRICA ANÁLISIS DE ESTABILIDAD TRANSITORIA.
Ta = J m = Tm Te (2.10)
donde:
Ta Par neto de aceleración, en Nw-m.
Tm Par mecánico o par en la flecha producido por la máquina prima, menos las pérdidas
rotacionales, en Nw-m.
Te Par electromagnético, en Nw-m.
2
J Momento de inercia de la masa del rotor, en Kg-m .
m Aclaración angular del rotor en radianes mecánicos/seg.
m Desplazamiento angular del rotor con respecto a un eje estacionario, en radianes mecánicos.
t tiempo, en seg.
m Velocidad angular del rotor, en rads. mec./seg.
La figura 2.14 muestra el par, velocidad y el flujo de potencia mecánica y eléctrica en una máquina
síncrona. El par mecánico Tm y el par electromagnético Te son considerados positivos para un
generador síncrono. Esto significa que el par Tm tiende a acelerar el rotor en la dirección positiva
de la velocidad de rotación s, como se muestra en la figura 2.14 (a).
Fig. 2.14. Flujo de potencia mecánica y eléctrica en una máquina síncrona.
M.C. J.L. LEMUS D. SISTEMAS ELÉCTRICOS DE POTENCIA.
162
INGENIERÍA ELÉCTRICA ANÁLISIS DE ESTABILIDAD TRANSITORIA.
En condiciones de operación de estado estable del generador, Tm y Te son iguales, por lo que el
par de aceleración Ta es cero. En este caso no existe aceleración o desaceleración del rotor y por
tanto su velocidad resultante es constante e igual a la velocidad síncrona.
La velocidad y aceleración, se definen como
d θm
m =
dt
d m d 2θ m
m = 2 (2.11)
dt dt
Sustituyendo la ecuación (2.11) en la ecuación (2.10), se obtiene
d 2θ m
J = Ta Tm Te (2.12)
dt 2
Debido a que m se mide con respecto a un eje de referencia fijo, su valor es absoluto, y como es
de interés conocer la velocidad relativa del rotor con respecto a la velocidad sincrónica, entonces
es más conveniente representar la posición angular del rotor con respecto a un eje de referencia
que gire a la velocidad sincrónica (eje sincrónico), como se muestra en la figura 2.15
De la figura 2.15, se define
m = sm t + m (2.13)
donde sm es la velocidad sincrónica de la máquina, en radianes mecánicos/seg., y m es el
desplazamiento angular del rotor, en radianes mecánicos, con respecto al eje de referencia
sincrónico.
M.C. J.L. LEMUS D. SISTEMAS ELÉCTRICOS DE POTENCIA.
163
INGENIERÍA ELÉCTRICA ANÁLISIS DE ESTABILIDAD TRANSITORIA.
Fig. 2.15. Posición del rotor con respecto a un eje de referencia sincrónico.
Derivando dos veces la ecuación (2.13) con respecto al tiempo, se obtiene
d θm d m
sm (2.14)
dt dt
d 2θ m d 2 m
(2.15)
dt 2 dt 2
Sustituyendo la ecuación (2.15) en la ecuación (2.12), se obtiene
d 2 m
J = Ta Tm Te (2.16)
dt 2
Generalmente, la ecuación (2.16) es más común representarla en términos de potencia, como
d 2 m
m J = m Ta Pa = Pm Pe, W (2.17)
dt 2
M.C. J.L. LEMUS D. SISTEMAS ELÉCTRICOS DE POTENCIA.
164
INGENIERÍA ELÉCTRICA ANÁLISIS DE ESTABILIDAD TRANSITORIA.
El coeficiente m J = M, es el Momentum Angular del Rotor, en Joules-seg/rad. mec. Por otro
lado, si m = s, M recibe el nombre de Constante de Inercia de la Máquina. La ecuación (2.17),
se escribe como
d 2 m
M = m Ta Pa = Pm Pe, W (2.18)
dt 2
Es importante mencionar que en la ecuación (2.18) M no es constante en el sentido estricto, debido
a que normalmente m no es igual a s bajo todas las condiciones de operación. Además, debido a
los datos que se proporcionan de las máquinas síncronas para estudios de estabilidad, es común
representar otra constante H en términos de M, la cual se define como sigue:
Energía cinética almacenada, en MJoules a velocidad sicrónica
H (2.19)
MVAnom de la Máquina
1 1
J (sm )2 M sm
H 2 2 , MJoules/MVA (2.20)
MVA nom MVA nom
Resolviendo para M, se obtiene
2H
M (MVA nom ), MJoules/rad. mec. (2.21)
sm
Sustituyendo la ecuación (2.21) en la ecuación (2.18), se obtiene
2H d 2 m Pa Pm Pe
= (2.22)
sm dt 2 MVA nom MVA nom
M.C. J.L. LEMUS D. SISTEMAS ELÉCTRICOS DE POTENCIA.
165
INGENIERÍA ELÉCTRICA ANÁLISIS DE ESTABILIDAD TRANSITORIA.
Con H, Pm y Pe expresadas en p.u. en base a MVAnom. En los análisis de estabilidad transitoria
de primera oscilación, se supone que la potencia Pm de entrada al primo-motor, es constante y que
la potencia eléctrica Pe que entrega el generador, depende de la situación del sistema visto desde
las terminales del generador. Observe que las unidades de m y sm son radianes mecánicos y rad.
mec./se, por tanto la ecuación (2.22) se puede escribir en la forma más conocida
2H d 2
= Pa = Pm Pe, p.u. (2.23)
s dt 2
Donde y s tienen unidades consistentes. A la ecuación (2.18) o (2.23) se le conoce con el
nombre de “Ecuación de Oscilación” de la máquina. La solución de la ecuación (2.23) dará una
respuesta de en función del tiempo t, obteniendo la característica de oscilación mostrada en la
figura 2.16
Fig. 2.16. Característica del ángulo con respecto al tiempo t.
M.C. J.L. LEMUS D. SISTEMAS ELÉCTRICOS DE POTENCIA.
166
INGENIERÍA ELÉCTRICA ANÁLISIS DE ESTABILIDAD TRANSITORIA.
Entonces, la ecuación (2.23) es la ecuación que gobierna la dinámica del rotor de la máquina
síncrona en estudios de estabilidad.
Para poder resolver la ecuación de oscilación, se debe de representar como dos ecuaciones
diferenciales de primer orden, de la forma
2H d
= Pm Pe, p.u.
s dt
(2.24)
d
= s
dt
En donde, , s y involucran radianes eléctricos o grados eléctricos.
CÁLCULO DE H EN UNIDADES DEL SISTEMA MKS.
De la definición de la constante H, se tiene que la energía cinética está determinada por
1
Ec J (sm )2 , Watt-seg.
2
1
Ec J (sm )2 (106 ), MWatt-seg. (2.25)
2
La velocidad síncrona sm en función de la revoluciones por minuto (RPM), es
2
sm (RPM) (2.26)
60
Sustituyendo las ecuaciones (2.25) y (2.26) en la ecuación (2.19), se obtiene
M.C. J.L. LEMUS D. SISTEMAS ELÉCTRICOS DE POTENCIA.
167
INGENIERÍA ELÉCTRICA ANÁLISIS DE ESTABILIDAD TRANSITORIA.
2
2
1
J (sm )2 (106 ) J (RPM) (106 )
H 2
1 60 (2.27)
MVA nom 2 MVA nom
J (RPM)2
H (5.48 x109 ) (2.28)
MVA nom
CÁLCULO DE H EN UNIDADES DEL SISTEMA MKS.
2
Se define la inercia rotativa (WR ), como el peso (W), en libras de las partes rotativas acopladas a
la misma flecha, multiplicada por el radio de giro (R) al cuadrado, en pies cuadrados. Además de
las relaciones:
WR 2
J , en slug ft 2 (2.29)
32.2
1 m = 3.281 ft ; 1 kg = 2.205 lbmasa = 0.0685 slug.
1
1 slug ft 2 2
1.356 kg m2 (2.30)
(0.0685) (3.281)
Sustituyendo las ecuaciones (2.29) y (2.30) en la ecuación (2.19), resulta
(1.356) (WR 2 )
(5.48 x109 ) (RPM)
2
32.2
H (2.31)
MVA nom
(2.31x1010 ) (WR 2 ) (RPM) 2 MW seg
H , (2.32)
MVA nom MVA
M.C. J.L. LEMUS D. SISTEMAS ELÉCTRICOS DE POTENCIA.
168
INGENIERÍA ELÉCTRICA ANÁLISIS DE ESTABILIDAD TRANSITORIA.
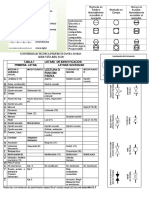
La constante de inercia H tiene valores característicos o un rango de valores para cada clase de
máquina. La tabla 2.1 muestra algunos valores típicos de constantes de inercia.
Table 2.1. Typical inertia constants of synchronous machines.*
Inertial Constant H
Type of Machine
Stored Energy in MW-sec per MVA**
Turbine Generator.
Condensing 1,800 r.p.m. 9-6
3,000 r.p.m. 7-4
Non-Condensing 3,000 r.p.m. 4-3
Water wheel Generator.
Slow-speed ( 200 r.p.m.) 2-3
High-speed ( 200 r.p.m.) 2-4
Synchronous Condenser.***
Large 1.25
Small 1.00
Synchronous Motor with load varying
from 1.0 to 5.0 and higher for heavy 2.00
flywheels.
* Reprinted with permission of Westinghouse Electric Corporation from Electrical Transmission and
Distribution Reference Book.
** Where range is given, the first figure applies to the smaller MVA sizes.
*** Hydrogen-Cooled, 25 per cent less.
Observe de la tabla 2.1 que el valor de H es considerablemente mayor para turbogeneradores de
vapor que para generadores hidroeléctricos.
Ejemplo 2.1. Considere un generador síncrono 3 de 555 MVA, 24 kV, f.p. = 0.9, 60 hz, 2 polos,
2 2
que tiene una inercia rotativa WR = 654,158 lb-ft . Calcule lo siguiente:
2
a) El momento de inercia J, en kg-m .
b) La constante de inercia H, en MW-seg/MVA.
c) La energía cinética Ec, en MW-seg.
Solución:
M.C. J.L. LEMUS D. SISTEMAS ELÉCTRICOS DE POTENCIA.
169
INGENIERÍA ELÉCTRICA ANÁLISIS DE ESTABILIDAD TRANSITORIA.
a) De las ecuaciones (2.29) y (2.30), se tiene
WR 2 (654,158) (1.356)
J (1.356) 27,547.8, kg m2
32.2 32.2
b) De la ecuación (2.31), se obtiene
2
9 (120) (60)
(5.48 x10 ) (27,547.8)
H 2 3.525 MW seg
555 MVA
c) De la ecuación (2.19), resulta
Ec (H) (MVAnom ) = (3.525) (555) = 1,956.4 MW seg.
2.2 MODELACIÓN DE LA MÁQUINA SÍNCRONA PARA ESTUDIOS DE
ESTABILIDAD TRANSITORIA.
La máquina síncrona al introducir fenómeno mecánico y eléctrico en el comportamiento dinámico,
resulta en la componente más difícil de modelar para estudios de estabilidad. Sin embargo, se
pretende presentar en forma resumida los circuitos equivalentes usados en estos estudios.
La figura 2.17 muestra los circuitos equivalentes de una máquina síncrona de rotor cilíndrico,
usados en los estudios de régimen permanente, y la figura 2.18 muestra los circuitos equivalentes
para la misma máquina usados en los estudios de régimen transitorio, conocidos como circuitos
clásicos. Observe que en las figura 2.17 (b) y 2.18 (b) se desprecia la resistencia.
Para una máquina de polos salientes no es posible establecer un circuito equivalente simple y su
comportamiento se estudia en base a su diagrama fasorial d-q, mostrado en la figura 2.19, y la
ecuación para condiciones de estado estable es:
M.C. J.L. LEMUS D. SISTEMAS ELÉCTRICOS DE POTENCIA.
170
INGENIERÍA ELÉCTRICA ANÁLISIS DE ESTABILIDAD TRANSITORIA.
Fig. 2.17. Circuitos equivalentes de una máquina síncrona de rotor cilíndrico para estudios
de régimen permanente.
Fig. 2.18. Circuitos equivalentes de una máquina síncrona de rotor cilíndrico para estudios
transitorios.
Fig. 2.19. Diagrama fasorial de una máquina síncrona de polos salientes.
M.C. J.L. LEMUS D. SISTEMAS ELÉCTRICOS DE POTENCIA.
171
INGENIERÍA ELÉCTRICA ANÁLISIS DE ESTABILIDAD TRANSITORIA.
Eg Vt j Xd Id j Xq Iq ; Xd Xq (2.33)
Donde I = Id + Iq. Además, bajo condiciones transitorias, se tiene: Xd X'd Xd , pero
X'q Xq debido a que el campo principal esta sobre el eje d.
X'd Xd , pero la diferencia es menor que en la ecuación (2.33).
Durante el periodo transitorio, la ecuación (2.33) se modifica y resulta
E'g Vt j Xd' Id j Xq Iq (2.34)
E'g (Vt j Xq I) j (Xd' Xq )Iq (2.35)
Las ecuaciones (2.34) y (2.35) concuerdan con el diagrama de la figura 2.19. Debido a que bajo
condiciones transitorias, X'd Xd , pero Xq permanece no afectada, y es válido asumir que
X'd Xq . Por tal motivo también se considera como circuito equivalente el mostrado en la figura
2.18. Esto es, el generador está representado por su modelo clásico: el voltaje en terminales
Vt, el voltaje detrás de reactancia transitoria E’g, y por su reactancia transitoria de eje
directo X’d conectada entre ellos. Para el análisis transitorio de primera oscilación, generalmente
se hacen las siguientes suposiciones:
La potencia mecánica de entrada es constante.
Se desprecia la potencia asincrónica o de amortiguamiento.
El generador se representa por su voltaje constante detrás de reactancia transitoria de eje
directo (no saturada)
El ángulo mecánico del rotor se puede representar por el ángulo del voltaje detrás de
reactancia transitoria.
M.C. J.L. LEMUS D. SISTEMAS ELÉCTRICOS DE POTENCIA.
172
INGENIERÍA ELÉCTRICA ANÁLISIS DE ESTABILIDAD TRANSITORIA.
2.3 MÉTODO DE ÁREAS IGUALES.
El método de áreas iguales es un método directo de solución al problema de estabilidad transitoria
en S.E.P., basado en conceptos de energía en el que se utilizan las gráficas P- en sus diferentes
estados de operación para determinar las condiciones de estabilidad.
Aunque el método es simple, tiene la restricción de que se puede aplicar solo a sistemas reales de
dos máquinas oscilando una con respecto de otra o en sistemas grandes, siempre y cuando se
puedan reducir a sistemas de dos máquinas equivalentes.
INTERPRETACIÓN DEL MÉTODO.
Para dar una interpretación del método se utiliza el sistema más simple de dos máquinas, que es el
de una máquina conectada a un bus infinito, como el mostrado en la figura 2.20
Fig. 2.20. Sistema máquina-Bus infinito.
La ecuación de oscilación de una máquina sin amortiguamiento, es
d 2 i
Mi = Pmi Pei (2.36)
dt 2
donde la potencia eléctrica Pei , es
Pei Re Ei' I*i (2.37)
M.C. J.L. LEMUS D. SISTEMAS ELÉCTRICOS DE POTENCIA.
173
INGENIERÍA ELÉCTRICA ANÁLISIS DE ESTABILIDAD TRANSITORIA.
Si la corriente Ii se expresa en base a admitancias nodales, entonces se tiene
n
Ii Yi j E'j (2.38)
j 1
Sustituyendo la ecuación (2.38) en la ecuación (2.37), resulta
n
Pei Re Ei' Yi*j E'j* (2.39)
j 1
Para el sistema de la figura 2.20, se tiene:
≡ ángulo del rotor del generador.
1 = 0, ángulo del bus infinito.
E1 ≡ Voltaje interno del generador.
E2 0 ≡ Voltaje del bus infinito.
Yi j Yi j i j
Si se desprecian las resistencias del generador y de la red, se tiene: 11 , 12 ,y
2 2
Pe1 = Pmáx Sen (2.40)
donde
Pmáx = E1 E2 Y12 (2.41)
M.C. J.L. LEMUS D. SISTEMAS ELÉCTRICOS DE POTENCIA.
174
INGENIERÍA ELÉCTRICA ANÁLISIS DE ESTABILIDAD TRANSITORIA.
Por lo que la ecuación (2.36) se puede escribir, como
d 2
M = Pm Pmáx Sen (2.42)
dt 2
La ecuación (2.42) se puede de descomponer en dos ecuaciones diferenciales de primer orden
d
= (2.43)
dt
d
M = Pm Pmáx Sen (2.44)
dt
Dividiendo la ecuación (2.44) entre la ecuación (2.43) y separando variables, resulta
M d = (Pm Pmáx Sen ) d (2.45)
Si se considera la máquina operando inicialmente en condiciones de sincronismo con un ángulo
= 0 (punto “a”), como se muestra en la figura 2.21
o bien
0
M d = 0
(Pm Pmáx Sen ) d (2.46)
integrando la ecuación (2.46), resulta
1 1
2
M 2 M 02 =
2 0
(Pm Pmáx Sen ) d
M.C. J.L. LEMUS D. SISTEMAS ELÉCTRICOS DE POTENCIA.
175
INGENIERÍA ELÉCTRICA ANÁLISIS DE ESTABILIDAD TRANSITORIA.
EC = 0
(Pm Pmáx Sen ) d 0
Pa d (2.47)
donde:
ΔEC es el incremento de energía cinética con respecto a ω0 (velocidad sincrónica).
Fig. 2.21. Curva P- para una máquina conectada a un bus infinito.
Pa = Pm Pe Pm Pmáx Sen (2.48)
La ecuación (2.47) dice que si por algún motivo se incrementa la velocidad de la máquina, la
energía ganada por ésta, podrá ser calculada resolviendo la integral indicada en esta ecuación.
ANÁLISIS DE UN INCREMENTO REPENTINO DE CARGA.
Supóngase que se incrementa la energía cinética de la máquina por la acción de un suministro
súbito de potencia mecánica (P’m) de entrada a ésta, como se muestra en la figura 2.22.
M.C. J.L. LEMUS D. SISTEMAS ELÉCTRICOS DE POTENCIA.
176
INGENIERÍA ELÉCTRICA ANÁLISIS DE ESTABILIDAD TRANSITORIA.
Fig. 2.22. Método de áreas iguales para un incremento súbito de potencia mecánica.
Esta acción equivale a aplicar un par mecánico mayor que el par electromagnético en la máquina
(Tm > Te), por lo que el par de aceleración se hace positivo (Ta > 0) y la máquina tiende a
acelerarse incrementando su velocidad, de 0 (punto “a”) a 1 (punto “b”) se tiene (Pm > Pe), por
lo que de acuerdo a la ecuación (2.48) existirá una potencia de aceleración Pa positiva y se
incrementará la energía cinética de la máquina (ω > ω0).
Al aumentar la velocidad angular, la posición relativa () aumentará de valor y el punto de
operación se moverá de “a” hacia “b”. Durante esta trayectoria al aumentar el ángulo se
incrementa la potencia eléctrica Pe y se disminuye la diferencia entre la potencia mecánica Pm y la
potencia eléctrica Pe (ver figura 2.22).
En el punto “b” se tiene (Pe = Pm), pero la velocidad angular es mayor que la velocidad sincrónica
(ω > ω0) debido a la aceleración positiva que se obtuvo de “a” “b”.
M.C. J.L. LEMUS D. SISTEMAS ELÉCTRICOS DE POTENCIA.
177
INGENIERÍA ELÉCTRICA ANÁLISIS DE ESTABILIDAD TRANSITORIA.
Por este motivo, la posición angular () sigue creciendo, siguiendo la trayectoria eléctrica de “b” a
“c”. Es importante notar que durante este trayecto (Pm < Pe), por lo cual se tendrá una potencia de
aceleración negativa (potencia de desaceleración) que tratará de reducir la velocidad angular y
eliminar la energía cinética ganada de “a” “b”.
Si la velocidad angular (ω) llega a ser igual a la velocidad sincrónica (ω0) durante el periodo en
que Pa < 0 (de “b” a “d”), se habrá eliminado la energía cinética ganada de “a” “b”. En “c”, la
velocidad es igual a la velocidad sincrónica (ω = ω0) y la aceleración es negativa (Pa < 0), lo que
produce que la velocidad angular empiece a tomar valores menores que ω0. Esto a su vez da como
resultado que la posición angular () empiece a disminuir, siguiendo la trayectoria de “c” “b”.
Como no se considera amortiguamiento, la máquina oscilará entre “a” y “c” pasando por “b” como
se muestra en la figura 2.22
La tabla 2.2 presenta un resumen de las condiciones presentadas en la figura 2.22
Tabla 2.2. Resumen de variables para el caso analizado en la figura 2.22
Trayectoria Velocidad angular Posición angular Aceleración
a-b ω > ω0 crece positiva
b ω > ω0 crece Cero
(máxima)
b-c ω > ω0 crece negativa
negativa
c ω = ω0 decrece
(mínima)
c-b ω < ω0 decrece negativa
b ω < ω0 decrece cero
(mínima)
b-a ω < ω0 decrece positiva
positiva
a ω = ω0 crece
(máxima)
M.C. J.L. LEMUS D. SISTEMAS ELÉCTRICOS DE POTENCIA.
178
INGENIERÍA ELÉCTRICA ANÁLISIS DE ESTABILIDAD TRANSITORIA.
En la figura 2.22 se observa que si al llegar al punto “d” la velocidad es aún mayor que ω0, el
ángulo seguirá creciendo y después del punto “d”, Pa vuelve a ser positiva, por lo que la
velocidad angular tenderá a seguir aumentando y no será posible llegar a la velocidad sincrónica.
En esta situación el sistema será inestable para el disturbio analizado. La figura 2.23 muestra esta
situación en las gráficas P - y - t.
Fig. 2.23. (a) Oscilación de la máquina entre a, b y c. (b) gráfica de la oscilación de -t.
En forma analítica, la condición de estabilidad requiere en la ecuación (2.47) que ω = ω0 de
donde:
2 2
EC = 0 0
(Pm Pmáx Sen ) d 0
Pa d (2.49
1 2
EC = 0 0
(Pm Pmáx Sen ) d 1
(Pmáx Sen Pm) d (2.50)
A1 A2
M.C. J.L. LEMUS D. SISTEMAS ELÉCTRICOS DE POTENCIA.
179
INGENIERÍA ELÉCTRICA ANÁLISIS DE ESTABILIDAD TRANSITORIA.
Estas integrales representan las áreas A1 y A2 de la figura 2.22, por lo que
EC = 0 A1 A2 (2.51)
o bien
A1 A2 (2.52)
Esto indica que para que el sistema sea estable, es que la energía ganada por la máquina en el
periodo de aceleración se pueda disipar en el periodo de desaceleración (ΔEC = 0). Esto se indica
como
A1 A2 (2.53)
Por tal motivo a este procedimiento se denomina como método de áreas iguales, y está
determinado por las ecuaciones (2.50) y (2.52).
El criterio de áreas iguales también se usa para determinar la potencia mecánica Pm máxima que
puede ser incrementada súbitamente sin pérdida de estabilidad. El límite de estabilidad ocurre
0 0
cuando está en la intersección de la línea de Pm y el ángulo 90 < < 180 , como se muestra en la
figura 2.24
Aplicando el criterio de áreas iguales a la figura 2.24, se tiene
c máx
0
(Pm Pmáx Sen ) d c (Pmáx Sen Pm) d (2.54)
Integrando la ecuación anterior y realizando simplificaciones, se obtiene
c máx
Pm ( c 0 ) 0
Pmáx Sen d c Pmáx Sen d Pm ( máx c)
M.C. J.L. LEMUS D. SISTEMAS ELÉCTRICOS DE POTENCIA.
180
INGENIERÍA ELÉCTRICA ANÁLISIS DE ESTABILIDAD TRANSITORIA.
Fig. 2.24. Método de áreas iguales para un incremento súbito máximo de potencia mecánica.
Pm( máx 0 ) Pm( Cos 0 Cos máx ) (2.55)
De la figura 2.24, se tiene
Pm Pmáx Sen máx (2.56)
sustituyendo la ecuación (2.56 en la ecuación (2.55), resulta
( máx 0 ) Sen máx Cos máx Cos 0 (2.57)
La ecuación (2.57) es una ecuación algebraica no lineal, que puede ser resuelta por un método
iterativo para máx. Después de obtener máx, se determina la potencia Pm máxima permisible o
el límite de estabilidad transitoria. De la figura 2.24, también se tiene
Pm Pmáx Sen c (2.58)
M.C. J.L. LEMUS D. SISTEMAS ELÉCTRICOS DE POTENCIA.
181
INGENIERÍA ELÉCTRICA ANÁLISIS DE ESTABILIDAD TRANSITORIA.
donde
c 180 máx (2.59)
ANÁLISIS DE UNA FALLA TRIFÁSICA SIN CAMBIO DE CONFIGURACION DE RED.
Ahora se analiza la estabilidad de un sistema máquina-bus infinito ante una falla trifásica en una
de sus líneas de transmisión, como se muestra en la figura 2.20. Si este sistema eléctrico está
operando inicialmente en condiciones de sincronismo, con una potencia de entrada Pm = Pe y
ángulo inicial 0 (punto “a”), como se muestra en el diagrama Pe- de la figura 2.25.
Fig. 2.25. Método de áreas iguales para una falla trifásica sin cambio de configuración de red.
Considere que ocurre una falla trifásica en una de las L.T’s (punto “F”) muy cerca del bus, la
potencia eléctrica Pe súbitamente se reduce a cero (punto “b”), mientras la potencia mecánica
permanece constante.
M.C. J.L. LEMUS D. SISTEMAS ELÉCTRICOS DE POTENCIA.
182
INGENIERÍA ELÉCTRICA ANÁLISIS DE ESTABILIDAD TRANSITORIA.
La diferencia entre las potencias ocasiona un cambio de energía cinética en la masa del rotor, el
área de aceleración A1 comienza a aumentar, la posición relativa () aumentará de valor y Pe se
moverá de “b” hacia “c”. Un tiempo después de iniciada la falla (punto “c”), ésta se libera por si
sola (falla momentánea); entonces, el generador una vez más transmite la potencia Pe = Pmáx Sen
(punto “d”) sobre la característica original Pe-. A partir de este punto se tiene aceleración
negativa y la velocidad angular tiende a disminuir, se tendrá un incremento en la posición angular
() hasta que la energía cinética ganada en la aceleración sea disipada, mostrada como el área A2,
y se llegue nuevamente a tener velocidad sincrónica, y el punto de operación avanza de “d” a “e” y
de “e” a “a” (ver figura 2.25).
Si el ángulo 2 puede ser determinado tal que A1 = A2, entonces el sistema es estable y el punto
final de operación es “a” después de tener varias oscilaciones alrededor de este punto.
Si el tiempo de duración de la falla se incrementa, el área A1 crece, el ángulo 1 aumenta hasta c
y por el criterio de áreas iguales A1 = A2, el ángulo 2 = máx como se muestra en la figura 2.26.
Para un tiempo (o ángulo) de liberación mayor que este valor, el sistema deberá ser inestable, esto
es A1 > A2. El valor máximo de tiempo y ángulo de liberación de la falla para que el sistema
sea estable se les conoce como el tiempo crítico (tc) y ángulo crítico (c) de liberación de falla,
respectivamente.
Para este caso simple (Pe = 0 durante la falla), de la figura 2.26, se obtienen las ecuaciones para las
áreas A1 y A2, resultando
C
A1 = 0
(Pm 0) d = Pm ( C 0 ) (2.60)
mientras que el área A2, es
M.C. J.L. LEMUS D. SISTEMAS ELÉCTRICOS DE POTENCIA.
183
INGENIERÍA ELÉCTRICA ANÁLISIS DE ESTABILIDAD TRANSITORIA.
Fig. 2.26. Método de áreas iguales para una falla trifásica sin cambio de configuración de red,
donde se muestra en ángulo critico (c).
máx
A2 = C
(Pmáx Sen Pm) d =
(2.61)
Pmáx (Cos C Cos máx ) Pmáx ( máx C )
igualando las ecuaciones (2.60) y (2.61) y realizando simplificaciones, se obtiene
Pm
Cos C = ( máx 0 ) Cos máx (2.62)
Pmáx
además, de la figura 2.26, se tiene
máx 180 1, radianes eléctricos (2.63)
Pm Pmáx Sen (2.64)
M.C. J.L. LEMUS D. SISTEMAS ELÉCTRICOS DE POTENCIA.
184
INGENIERÍA ELÉCTRICA ANÁLISIS DE ESTABILIDAD TRANSITORIA.
sustituyendo las ecuaciones (2.63) y (2.64) en la ecuación (2.62), simplificando el resultado y
resolviendo para c, resulta
C = Cos 1 ( 2 0 ) Sen 0 Cos 0 (2.65)
En condiciones de falla (Pe = 0), la ecuación de oscilación del generador es
2H d 2
= Pm 0 (2.66)
s dt 2
Integrando dos veces la ecuación (2.66) con las siguientes condiciones iniciales: (t =0) = 0 y
d (0)
= 0, resulta
dt
d Pm d (0) s Pm
= s t+ = t+0 (2.67)
dt 4H dt 4H
s Pm
(t) = t 2 + 0 (2.68)
4H
Sustituyendo c, correspondiente a tc, en la ecuación (2.68), se obtiene
s Pm
C = t c2 + 0 (2.69)
4H
Despejando tc, de la ecuación (2.69), resulta
4H ( c 0 )
tc = (2.70)
s Pm
M.C. J.L. LEMUS D. SISTEMAS ELÉCTRICOS DE POTENCIA.
185
INGENIERÍA ELÉCTRICA ANÁLISIS DE ESTABILIDAD TRANSITORIA.
Es importante mencionar que las ecuaciones (2.69) y (2.70) solamente son válidas cuando
ocurre una falla trifásica sólida (Pe = 0) y no cambia la configuración de la red.
ANÁLISIS DE UNA FALLA TRIFÁSICA CON CAMBIO DE CONFIGURACION DE
RED.
En esta sección se analiza la estabilidad de un sistema máquina-bus infinito ante una falla trifásica
en una de sus líneas de transmisión, como se muestra en la figura 2.27. Ahora la falla es liberada
después de un tiempo, desconectando la línea fallada mediante la operación de los interruptores
conectados en sus extremos. Las cantidades a determinar son el ángulo crítico y el tiempo crítico
de liberación de falla para que el sistema no pierda estabilidad.
Fig. 2.27. Sistema máquina-Bus infinito con falla trifásica en medio de una de sus LT’s.
Las características Pe- para los periodos de pre-falla, falla y post-falla se muestran en la figura
2.28. En la condición inicial el sistema está operando en el punto “a” de la figura, con un ángulo
inicial 0 y velocidad angular sincrónica 0 (Pm = Pe1), al ocurrir una falla trifásica solida (punto
“F”) se pasa a operar en el punto “b” de la curva de falla que tiene una menor amplitud debido al
abatimiento del voltaje. El punto de operación avanza de “b” a “c” debido a la potencia de
aceleración positiva (Pm > Pe2) que incrementa la velocidad angular. En “c” se libera la falla y se
desconecta la línea, el punto de operación pasa al punto “d” de la característica de post-falla, la
cual tiene una amplitud menor que la curva de pre-falla debido a la desconexión de la línea (Pm <
Pe3). A partir de este punto se tiene aceleración negativa y la velocidad angular tiende a disminuir,
se tendrá un incremento en la posición angular hasta que la energía ganada en el periodo de
aceleración sea disipada y se llegue a tener nuevamente la velocidad sincrónica.
M.C. J.L. LEMUS D. SISTEMAS ELÉCTRICOS DE POTENCIA.
186
INGENIERÍA ELÉCTRICA ANÁLISIS DE ESTABILIDAD TRANSITORIA.
Fig. 2.28. Características P- para las condiciones de pre-falla, falla y post-falla.
Esto debe suceder antes del punto “e” para tener la fuerza restauradora de la aceleración negativa
que permita reducir la posición angular al tener una velocidad angular menor a ω0, esto sucede en
la trayectoria de “e” a “f”. Una vez más, si A1 = A2, entonces el sistema es estable y el punto final
de operación es “f” después de tener varias oscilaciones alrededor de este punto.
Si el tiempo de duración de la falla se incrementa, el área A1 crece, el ángulo 1 aumenta hasta c
y por el criterio de áreas iguales A1 = A2, el ángulo 2 = máx como se muestra en la figura 2.29.
El ángulo crítico c de liberación de la falla para una potencia transmitida de falla, será aquel en
que el área A1 sea igual a A2 como se muestra en la figura 2.29. El tiempo crítico tc de liberación
de la falla correspondiente a este ángulo, se determina resolviendo la ecuación de oscilación para
el periodo de falla, con lo que se obtiene la posición angular en función del tiempo.
M.C. J.L. LEMUS D. SISTEMAS ELÉCTRICOS DE POTENCIA.
187
INGENIERÍA ELÉCTRICA ANÁLISIS DE ESTABILIDAD TRANSITORIA.
Fig. 2.29. Método de áreas iguales para una falla trifásica con cambio de configuración de red,
donde se muestra en ángulo critico (c) y las condiciones de pre-falla, falla y post-falla.
Aplicando el criterio de áreas iguales a la figura 2.29, resulta
C máx
Pm( C 0 ) 0
Pmáx2 Sen d C
Pmáx3 Sen d Pm( máx C ) (2.71)
donde:
Pm
máx 180 Sen1
Pmáx3
Integrando ambos lados de la ecuación (2.71) y resolviendo para c, se obtiene
Pm ( C 0 ) Pmáx2 (Cos C Cos 0 ) Pm ( máx C )
Pmáx3 (Cos máx Cos C ) 0
M.C. J.L. LEMUS D. SISTEMAS ELÉCTRICOS DE POTENCIA.
188
INGENIERÍA ELÉCTRICA ANÁLISIS DE ESTABILIDAD TRANSITORIA.
Pm ( máx 0 ) Pmáx3 Cos máx Pmáx2 Cos 0
Cos C (2.72)
(Pmáx3 Pmáx2 )
El ángulo crítico c de liberación de la falla se puede calcular de la ecuación (2.72), donde los
ángulos están en radianes.
La aplicación del método de áreas iguales permite determinar el ángulo crítico c de liberación de
la falla para mantener estabilidad. Sin embargo, debido a la no linealidad de la ecuación de
oscilación, no es posible aplicar una solución analítica para determinar el tiempo crítico de
liberación de la falla. En la próxima sección se discutirá la solución numérica de la ecuación de
oscilación, la cual puede ser extendida a sistemas grandes.
Ejemplo 2.2. Un generador síncrono 3 , 60 hz., está conectado a un bus infinito a través de un
transformador y una doble línea de transmisión, como se muestra en la figura E2.2a
Fig. E2.2a. Sistema máquina-bus infinito para el ejemplo 2.2.
El generador está entregando al bus infinito una potencia S = 0.8 + j 0.074 p.u. con un voltaje en el
bus infinito de 1.0 p.u. Los valores de las reactancias están en p.u. sobre una misma base.
Considere que el generador síncrono tiene una constante H = 5 MJ / MVA.
a) Determine la ecuación de potencia eléctrica entregada por el generador.
M.C. J.L. LEMUS D. SISTEMAS ELÉCTRICOS DE POTENCIA.
189
INGENIERÍA ELÉCTRICA ANÁLISIS DE ESTABILIDAD TRANSITORIA.
b) Suponga que ocurre una falla trifásica sólida en la línea L2 (punto “F”), la cual se extingue
por si sola 9 ciclos después, manteniendo todos los interruptores cerrados. Determine si el
sistema es o no estable y calcule el ángulo máximo permitido sin pérdida de sincronismo. La
potencia Pm permanece constante durante el disturbio.
c) Si la falla dura más de 9 ciclos, determine el ángulo crítico que debe de existir para mantener
sincronismo y el tiempo correspondiente a este ángulo.
d) Determine el ángulo crítico para que el generador permanezca en sincronismo si ocurre la
misma falla pero a la mitad de la línea L2. Considere ahora que la falla es eliminada con la
apertura de los interruptores de la línea.
Solución:
a) Para la condición inicial, el circuito por fase es:
Fig. E2.2b. Circuito por fase para el problema 2.2 (condición inicial).
S* 0.8 j0.074
I= = = 0.8034 5.28 p.u.
V* 1.0 0
Del circuito, se obtiene
M.C. J.L. LEMUS D. SISTEMAS ELÉCTRICOS DE POTENCIA.
190
INGENIERÍA ELÉCTRICA ANÁLISIS DE ESTABILIDAD TRANSITORIA.
0.3
X12 = 0.3 + 0.2 + = 0.65 p.u.
2
E'g V j X12 I 1.0 0 + (0.65 90 ) (0.8034 5.28 ) = 1.17 26.38 p.u.
E 'g V (1.17) (1.0)
Pe1 = Sen = Sen = 1.8 Sen p.u.
X12 0.65
Esta condición de operación se muestra en la figura E2.2c.
Fig. E2.2c. Característica P- para el inciso (b) del problema 2.2
En el punto “a” en la figura E2.2c, se tiene : Pe1 = 1.8 Sen 0 = Pm = 0.8 p.u. , por lo tanto
0.8
0 = Sen 1 = 26.388 = 0.4606 rad.
1.8
M.C. J.L. LEMUS D. SISTEMAS ELÉCTRICOS DE POTENCIA.
191
INGENIERÍA ELÉCTRICA ANÁLISIS DE ESTABILIDAD TRANSITORIA.
Además:
máx = 180 0 = 153.61 = 2.681 rad.
En condiciones de falla, se tiene: Pe = 0 p.u. para 0 t 9 ciclos y de la ecuación (2.68),
para t = 9 ciclos = 0.15 seg., se tiene
(t ) = S Pm t 2 + 0
4H
(2 ) (60) (0.8)
1 = (0.15) = (0.15)2 + 0.4606 = 0.7999 rad. = 45.83
(4) (5)
Por lo tanto, se tiene que el sistema es transitoriamente estable (ver figura E2.2c).
Además, de la figura E2.2c, se tiene
1
A1 0 Pm d 0.8 ( 1 0 ) 0.8 (0.7999 0.4606) = 0.27144
2 2
A2 1 (Pmáx Sen Pm) d = 1 (1.8 Sen 0.8) d = A1
1.8 Cos (45.83 ) Cos 2 0.8 ( 2 0.8) = 0.27144
1.8 Cos 2 + 0.8 2 1.62278
Resolviendo la anterior ecuación algebraica no lineal en forma iterativa, se obtiene:
2 65.2 = 1.1384 rad. como se muestra en la figura E2.2c.
M.C. J.L. LEMUS D. SISTEMAS ELÉCTRICOS DE POTENCIA.
192
INGENIERÍA ELÉCTRICA ANÁLISIS DE ESTABILIDAD TRANSITORIA.
b) La figura E2.2d muestra la característica P- para esta condición, donde se tiene que el ángulo
tiende a máx y el ángulo tiende a c
Fig. E2.2d. Característica P- para el inciso (c) del problema 2.2
Por lo tanto, de esta figura, se tiene
C máx
A1 0 Pm d A 2 C (Pmáx Sen Pm) d
0.8 ( c 0.4606) 1.8 Cos C Cos (153.61 ) 0.8 (2.681 C )
0.16398
1.8 Cos C 0.16398 C Cos 1 = 84.77 = 1.4796 rad.
1.8
M.C. J.L. LEMUS D. SISTEMAS ELÉCTRICOS DE POTENCIA.
193
INGENIERÍA ELÉCTRICA ANÁLISIS DE ESTABILIDAD TRANSITORIA.
Además, de la ecuación (2.70), para (t) = (tc) = c = 1.4796 rad, se tiene
4H
tC = (t C ) 0
S Pm
(4) (5)
tC = (377) (0.8) (1.4796 0.4606) = 0.2599 seg = 15.6 ciclos
c) Para una falla trifásica solida a la mitad de una de las líneas, el circuito por fase se muestra en
la figura E2.2e
Fig. E2.2e. Circuito por fase para el inciso (c) del problema 2.2
Convirtiendo la estrella de la izquierda a una delta para eliminar los nodos “3” y “4”, resulta el
circuito de la figura E2.2f.
Donde la reactancia equivalente entre los puntos 1 y 2, es
(0.5) (0.3) + (0.5) (0.15) + (0.3) (0.15)
X12 = 1.8 p.u.
0.15
M.C. J.L. LEMUS D. SISTEMAS ELÉCTRICOS DE POTENCIA.
194
INGENIERÍA ELÉCTRICA ANÁLISIS DE ESTABILIDAD TRANSITORIA.
Fig. E2.2f. Circuito equivalente por fase de la fig. E2.2e.
Por lo tanto, la característica eléctrica durante la falla (Pe2), es
E 'g V (1.17) (1.0)
Pe2 = Sen = Sen = 0.65 Sen p.u.
X12 1.8
Cuando la falla se elimina con la apertura de los interruptores de línea, la impedancia equivalente
entre los nodos 1y 2, es
X12 0.3 + 0.2 + 0.3 = 0.8 p.u.
Entonces, la característica eléctrica para condición de post-falla (Pe3), es
E 'g V (1.17) (1.0)
Pe3 = Sen = Sen = 1.4625 Sen p.u.
X12 0.8
d) La figura E2.2g muestra la característica P- para la falla a mitad de la línea 2.
Por lo tanto, de esta figura, se tiene
Pe3 = 1.4625 Sen máx = Pm = 0.8 p.u. , por lo tanto
M.C. J.L. LEMUS D. SISTEMAS ELÉCTRICOS DE POTENCIA.
195
INGENIERÍA ELÉCTRICA ANÁLISIS DE ESTABILIDAD TRANSITORIA.
Fig. E2.2f. Característica P- para el inciso (d) del problema 2.2
0.8
máx = 180 Sen 1 = 146.84 = 2.5628 rad.
1.4625
C C
A1 0 (Pm Pmáx 2 Sen ) d 26.388 (0.8 1.4625 Sen ) d
0.8 ( C 0.4606) 0.65 [Cos (26.388 ) Cos C ]
máx 146.84
A2 C (Pmáx 3 Sen Pm) d C (0.65 Sen 0.8) d
1.4625 [Cos C Cos (146.84 )] 0.8 [2.5628 C ]
Haciendo, A1 = A2, se obtiene
M.C. J.L. LEMUS D. SISTEMAS ELÉCTRICOS DE POTENCIA.
196
INGENIERÍA ELÉCTRICA ANÁLISIS DE ESTABILIDAD TRANSITORIA.
0.8 C 0.3684 0.58227 + 0.65 Cos C =
= 1.4625 Cos C + 1.22432 2.05024 0.8 C
0.12483
Cos C = = 0.1536
0.8125
C = Cos C1 ( 0.1536) = 98.837 = 1.725 rad.
NOTA: este resultado también se puede obtener aplicando directamente la ecuación (2.72).
También se puede usar el toolbox de MatLab que proporciona el libro: “Power System Analysis”
de Hadi Saadat para resolver este tipo de problemas. Usando la función eacfault(Pm, E, V, X1,
X2, X3) que proporciona el toolbox de MatLab del libro de Saadat, (ejemplo 11.5) para el caso
anteriormente analizado, se obtienen los siguientes características (empleadas como una
comprobación de las curvas obtenidas en el ejemplo 2.2).
Se puede observar la gran similitud de resultados obtenidos analíticamente (figuras E2.2d y E2.2f)
con los obtenidos con el toolbox de MatLab del libro de Saadat (figuras 2.30 y 2.31).
M.C. J.L. LEMUS D. SISTEMAS ELÉCTRICOS DE POTENCIA.
197
INGENIERÍA ELÉCTRICA ANÁLISIS DE ESTABILIDAD TRANSITORIA.
Fig. 2.30. Característica P- para el inciso (c) del problema 2.2, usando el toolbox del libro
de Saadat.
Fig. 2.31. Característica P- para el inciso (d) del problema 2.2, usando el toolbox del libro
de Saadat.
M.C. J.L. LEMUS D. SISTEMAS ELÉCTRICOS DE POTENCIA.
198
INGENIERÍA ELÉCTRICA ANÁLISIS DE ESTABILIDAD TRANSITORIA.
TÉCNICA DE ELIMINACIÓN NODAL.
En el ejemplo 2.2 se han utilizado técnicas comunes para la eliminación de nodos, como es el uso
de combinación de reactancias serie, paralelo y de trasformaciones estrella-delta o delta-estrella.
Ahora se utiliza la matriz admitancias de red YBUS. Considere el circuito de la figura 2.32, el cual
corresponde a un sistema máquina-bus infinito en condiciones iniciales.
Fig. 2.32. Circuito por fase para mostrar la reducción de red (condición inicial).
Redibujando el circuito de la figura 2.32 como el de la figura 2.33 donde en lugar de reactancias de
rama se usan admitancias.
Fig. 2.33. Circuito por fase de admitancias correspondiente al circuito 2.32 (condición inicial).
M.C. J.L. LEMUS D. SISTEMAS ELÉCTRICOS DE POTENCIA.
199
INGENIERÍA ELÉCTRICA ANÁLISIS DE ESTABILIDAD TRANSITORIA.
La figura 2.34 muestra el circuito que corresponde a una falla trifásica solida a la mitad de una de
las líneas, donde en lugar de reactancias de rama se usan admitancias.
Fig. 2.34. Circuito por fase de admitancias correspondiente al circuito 2.32 (condición de falla).
En general, para este sistema de 3 nodos, la ecuación nodal en forma matricial es
I1 Y11 Y12 Y13 V1
I Y Y23 V
2 21 Y22 2 (2.73)
I3 Y31 Y32 Y33 V3
Eliminando el nodo 3 porque no hay fuente conectada en él, entonces se tiene para este nodo
I3 0 Y31 V1 Y32 V2 Y33 V3 (2.74)
Y31 Y32
V3 (2.75)
Y33 Y33
Sustituyendo la ecuación (2.75) en las dos ecuaciones restantes de la ecuación (2.73), resulta
M.C. J.L. LEMUS D. SISTEMAS ELÉCTRICOS DE POTENCIA.
200
INGENIERÍA ELÉCTRICA ANÁLISIS DE ESTABILIDAD TRANSITORIA.
I1 Y11 V1 Y12 V2 Y13 V3
Y Y Y Y (2.76)
= Y11 13 31 V1 Y12 13 32 V2
Y33 Y33
I 2 Y21 V1 Y22 V2 Y23 V3
Y Y Y Y (2.77)
= Y21 23 31 V1 Y22 23 32 V2
Y33 Y33
En forma matricial, se tiene
I1 Y ' Y ' V1
I 11 12
V (2.74)
2 Y21 Y22
' '
2
donde:
Y Y Y Y
Y11' = Y11 13 31 Y12' Y21
'
Y12 13 32
Y33 Y33
(2.75)
Y Y
'
Y22 = Y22 23 32
Y33
En forma compacta, se tiene la matriz red reducida siguiente:
Y ' Y '
YBUS (reducida) 11 12
(2.76)
Y21 Y22
' '
En general, la eliminación del nodo “n”, se obtiene con la ecuación (2.77)
M.C. J.L. LEMUS D. SISTEMAS ELÉCTRICOS DE POTENCIA.
201
INGENIERÍA ELÉCTRICA ANÁLISIS DE ESTABILIDAD TRANSITORIA.
Yk n (vieja) Yn k (vieja)
Yk j (nueva) = Yk j (vieja) (2.77)
Yn n (vieja)
Sustituyendo los valores de las figuras 2.33 y 2.34 en la ecuación (2.73), se obtienen las matrices
de red YBUS para condiciones iniciales y de falla mostradas en las ecuaciones (2.78) y (2.79)
j 2.86 j 0.0 j 2.86
YBUS (inicial) j 0.0 j 4.0 j 4.0 (2.78)
j 2.86 j 4.0 j 6.86
j 2.86 j 0.0 j 2.86
YBUS (falla) j 0.0 j 6.0 j 2.0 (2.79)
j 2.86 j 2.0 j 8.86
Aplicando las ecuaciones (2.75) o la ecuación (2.77) resultan las matrices de red reducidas
siguientes:
j1.667 j1.667
YBUSreducida (inicial) (2.80)
j1.667 j1.667
j1.937 j 0.646
YBUSreducida (falla) (2.81)
j 0.646 j 5.549
2.4 SOLUCIÓN NUMÉRICA DE LA ECUACIÓN DE OSCILACIÓN.
Para sistemas grandes, existen varios métodos de integración numérica sofisticados disponibles
para dar solución a la ecuación de oscilación, en los cuales se emplea la computadora para
determinar el desplazamiento angular en función del tiempo para todas las máquinas. Entre los
más comunes podemos mencionar los siguientes: Euler, Euler modificado, y el poderoso método
de Runge-Kutta de 4º orden.
M.C. J.L. LEMUS D. SISTEMAS ELÉCTRICOS DE POTENCIA.
202
INGENIERÍA ELÉCTRICA ANÁLISIS DE ESTABILIDAD TRANSITORIA.
Además de estos métodos, también se aplica un método convencional de cálculo manual o en
computadora de solución sencilla y aproximada muy similar a los métodos de integración numérica
denominado punto por punto.
Se presenta el método de punto por punto para determinar el cambio en la posición angular en un
sistema máquina-bus infinito. Sin embargo, el procedimiento es general y se puede aplicar a un
sistema mutimáquina.
SOLUCIÓN DE LA ECUACIÓN DE OSCILACIÓN POR EL MÉTODO DE PUNTO POR
PUNTO.
Este método calcula el cambio en la posición angular del rotor durante un corto intervalo de
tiempo t. Durante el procedimiento computacional se realizan las siguientes suposiciones:
a) La potencia de aceleración Pa calculada al inicio de un intervalo se considera constante desde
el punto medio del intervalo anterior hasta el punto medio del intervalo posterior. Ejemplo:
3 1
n t a n t , como se muestra en la figura 2.35 (a).
2 2
b) La velocidad angular calculada en el punto medio de un intervalo, permanece constante
sobre ese intervalo, como se muestra en la figura 2.35 (b).
PROCEDIMIENTO.
1) Se calcula la potencia de aceleración Pa
Pa (0 ) Pm Pe(0 ) Pm Pmáx Sen (0 ) (2.82)
Cuando se aplica o remueve una falla, existe discontinuidad de la potencia eléctrica Pe y se tienen
dos valores de Pa al inicio del intervalo, por lo que se debe de considerar el valor medio de Pa,
como se muestra en la figura 2.36
M.C. J.L. LEMUS D. SISTEMAS ELÉCTRICOS DE POTENCIA.
203
INGENIERÍA ELÉCTRICA ANÁLISIS DE ESTABILIDAD TRANSITORIA.
Fig. 2.35. Valores discretos y continuos de Pa, y ángulo en función del tiempo, para
la solución de la ecuación de oscilación por el método de punto por punto.
M.C. J.L. LEMUS D. SISTEMAS ELÉCTRICOS DE POTENCIA.
204
INGENIERÍA ELÉCTRICA ANÁLISIS DE ESTABILIDAD TRANSITORIA.
Fig. 2.36. Discontinuidad de Pa, en el cálculo de punto por punto. A es una discontinuidad que
1
ocurre en el inicio del m-ésimo intervalo, entonces Pa(m 1) = Pa(m 1) Pa(m 1)
2
se usa en el cálculo de m. B es una discontinuidad que ocurre en el punto medio del n-ésimo
intervalo, aquí Pa(n 1) se utiliza en el cálculo de n.
donde 0 es la velocidad angular sincrónica.
2) Se determinan el cambio en el ángulo y el ángulo del rotor para el primer intervalo
t 2
(1) = (1) * t Pa (0 ) (2.86)
M
t 2
(1) = 0 (1) 0 Pa (0 ) (2.87)
M
Las ecuaciones para el n-ésimo intervalo se pueden escribir como:
M.C. J.L. LEMUS D. SISTEMAS ELÉCTRICOS DE POTENCIA.
205
INGENIERÍA ELÉCTRICA ANÁLISIS DE ESTABILIDAD TRANSITORIA.
Pa (n 1) = Pm Pe (n 1) Pm Pmáx Sen (n 1) (2.88)
Pa (n 1)
(n 1) (2.89)
M
t
(n) = (n 1) * t Pa (n 1) (2.90)
M
t
(n) = (n 1) (n) (n 1) (n 1) * t = (n 1) Pa (n 1) (2.91)
M
t 2
(n) = (n) * t (n 1) Pa (n 1) (2.92)
M
(n) = (n 1) (n) (2.93)
El procedimiento se ilustra con el siguiente ejemplo
Ejemplo 2.3. Un generador síncrono 3 , de 25 MVA, 60 hz., está conectado a través de un
transformador y una doble línea de transmisión a un gran sistema metropolitano, el cual se puede
considerar como un bus infinito, como se muestra en la figura E2.3a.
Fig. E2.3a. Sistema Máquina-Bus infinito para el ejemplo 2.3
M.C. J.L. LEMUS D. SISTEMAS ELÉCTRICOS DE POTENCIA.
206
INGENIERÍA ELÉCTRICA ANÁLISIS DE ESTABILIDAD TRANSITORIA.
La unidad generadora (incluyendo la máquina prima) tiene una energía cinética de 2.76
MJoule/MVA a voltaje nominal. Los valores de las reactancias están en p.u. sobre una base de 25
MVA.
El generador está entregando 20 MVA al sistema metropolitano. El voltaje detrás de reactancia
transitoria del generador, es de 1.03 p.u. y el voltaje del bus infinito es de 1.0 p.u.
Considere que ocurre una falla trifásica sólida a la mitad de una de las líneas de transmisión (punto
“F”), la cual es eliminada a los 0.4 seg. después, con la apertura simultánea de los respectivos
interruptores de línea.
a) Determine la ecuación de potencia eléctrica entregada por el generador, para las tres
condiciones operativas (pre-falla, falla y post-falla).
b) Utilice el método de punto por punto para que calcule y grafique la curva de oscilación del
generador para un tiempo de estudio de 1.05 seg. Considere un paso de integración t = 0.5
seg.
Solución:
a) Para la condición inicial, el circuito por fase se muestra en la figura E2.3b
Fig. E2.3b. Circuito por fase para el problema 2.3 (condición inicial).
Del circuito, de la figura E2.3a, se obtiene
M.C. J.L. LEMUS D. SISTEMAS ELÉCTRICOS DE POTENCIA.
207
INGENIERÍA ELÉCTRICA ANÁLISIS DE ESTABILIDAD TRANSITORIA.
0.2
X12 = 0.2 + 0.1 + = 0.4 p.u.
2
E'g Vm (1.03) (1.0)
Pe1 = Sen = Sen = 2.575 Sen p.u.
X12 0.4
Para la condición inicial se obtiene: Pe1 = 2.575 Sen 0 = Pm = 0.8 p.u. , por lo tanto
0.8
0 = Sen 1 = 18.1 = 0.3159 rad.
2.575
Para una falla trifásica solida a la mitad de una de las líneas, el circuito por fase se muestra en la
figura E2.3c.
Convirtiendo la estrella de la izquierda a una delta para eliminar los nodos “3” y “4”, resulta el
circuito de la figura E2.3d.
Fig. E2.3c. Circuito por fase para el problema 2.3 (condición de falla).
Donde la reactancia equivalente entre los puntos 1 y 2, es
(0.3) (0.1) + (0.3) (0.2) + (0.1) (0.2)
X12 = 1.1 p.u.
0.1
M.C. J.L. LEMUS D. SISTEMAS ELÉCTRICOS DE POTENCIA.
208
INGENIERÍA ELÉCTRICA ANÁLISIS DE ESTABILIDAD TRANSITORIA.
Fig. E2.3d. Circuito equivalente resultante del circuito de la figura E2.3c.
E'g Vm (1.03) (1.0)
Pe2 = Sen = Sen = 0.936 Sen p.u.
X12 1.1
Cuando la falla se elimina con la apertura de los interruptores de línea, la impedancia equivalente
entre los nodos 1 y 2, es
X12 0.2 + 0.1 + 0.2 = 0.5 p.u.
E'g Vm (1.03) (1.0)
Pe3 = Sen = Sen = 2.06 Sen p.u.
X12 0.5
b) Para utilizar el método de punto por punto, es necesario evaluar las constantes M y
t 2
M
H 2.76
como sigue: M = = = 2.56 X 10 - 4 p.u. y
(180) f (180) (60)
t 2 =
(0.05)2
= 9.7656
M 2.56 X 10 - 4
La aplicación del método se representa en la tabla 2.3
M.C. J.L. LEMUS D. SISTEMAS ELÉCTRICOS DE POTENCIA.
209
INGENIERÍA ELÉCTRICA ANÁLISIS DE ESTABILIDAD TRANSITORIA.
Table 2.3. Point-by-Point Computation of Swing Curve (example 2.3).
t Pmáx Pmáx Sin Pa = 0.8-Pe ( t) 2
Pa
Sen M
(sec.) (p.u.) (p.u) (p.u.) (elec. deg.) (elec. deg.) (elec. deg.)
0- 2.575 0.3107 0.8000 0.0000 18.1
0+ 0.936 0.3107 0.2908 0.5092 18.1
0 avg. 0.2546 2.486 0.0
2.486
0.05 0.936 0.3515 0.3290 0.4710 4.600 20.58
7.086
0.10 0.936 0.4644 0.4346 0.3654 3.568 27.67
10.654
0.15 0.936 0.6200 0.5803 0.2197 2.146 38.32
12.751
0.20 0.936 0.7780 0.7282 0.0718 0.701 51.07
13.452
0.25 0.936 0.9027 0.8450 - 0.0450 - 0.439 64.52
13.013
0.30 0.936 0.9764 0.9139 - 0.1140 - 1.112 77.53
11.901
0.35 0.936 1.000 0.9360 - 0.1360 - 1.328 89.43
10.573
0.40- 0.936 0.9848 0.9218 100.00
0.40+ 2.060 0.9848 2.0287
0.40 avg. 1.4752 - 0.6752 - 6.600
3.973
0.45 2.060 0.9704 2.0000 - 1.2000 - 11.718 103.97
- 7.745
0.50 2.060 0.9941 2.0478 - 1.2478 - 12.186 96.22
- 19.931
0.55 2.060 0.9715 2.0013 - 1.2013 - 11.731 79.29
- 31.662
- 31.662
0.60 2.060 0.7388 1.5220 - 0.7220 - 7.050 47.63
- 38.712
0.65 2.060 0.1550 0.3200 0.4800 4.687 8.92
- 34.025
0.70 2.060 - 0.424 - 0.8740 1.6740 16.347 - 25.11
- 17.678
- 17.678
0.75 2.060 - 0.679 - 1.4000 2.2000 21.484 - 42.79
3.806
0.80 2.060 - 0.629 - 1.3000 2.1000 20.508 - 39.00
24.314
24.314
0.85 2.060 - 0.253 - 0.5220 1.3220 12.910 - 14.68
37.224
M.C. J.L. LEMUS D. SISTEMAS ELÉCTRICOS DE POTENCIA.
210
INGENIERÍA ELÉCTRICA ANÁLISIS DE ESTABILIDAD TRANSITORIA.
Table 2.3. Continuation.
t Pmáx Pmáx Sin Pa = 0.8-Pe t 2
Sin Pa
M
(sec.) (p.u.) (p.u) (p.u.) (elec. deg.) (elec. deg.)
(elec. deg.)
0.90 2.060 0.3833 0.7900 0.0100 0.0976 22.54
37.322
0.95 2.060 0.8648 1.7815 - 0.9815 - 9.5850 59.86
27.737
1.00 2.060 0.9991 2.0582 - 1.25820 - 12.287 87.60
15.450
1.05 2.060 103.05
Observe como el ángulo crece hasta un valor máximo de = 103.97° y después oscila hasta
establecerse en = 103.05° en un tiempo de 1.05 seg. Por lo cual, se puede concluir que el sistema
es transitoriamente estable.
SOLUCIÓN DE LA ECUACIÓN DE OSCILACIÓN POR LOS MÉTODOS: EULER,
EULER MODIFICADO, RUNGE-KUTTA 2º Y 4º ORDEN.
Nota: estos métodos los expondrán los alumnos en clase.
2.5 SISTEMA MULTIMÁQUINA.
Las ecuaciones de un sistema multimáquina se pueden escribir en forma similar que para un
sistema máquina-bus infinito. Las suposiciones que se realizan en este sistema, también son
válidas para el caso multimáquina, como son:
1. Cada máquina síncrona se representa por una fuente de voltaje constante en serie con su
reactancia transitoria de eje directo. Esta representación desprecia el efecto de la saliencia de
los polos y asume enlaces de flujo constantes.
2. Se desprecia el efecto de los gobernadores y la potencia de entrada Pm se asume constante
durante todo el periodo de la simulación.
M.C. J.L. LEMUS D. SISTEMAS ELÉCTRICOS DE POTENCIA.
211
INGENIERÍA ELÉCTRICA ANÁLISIS DE ESTABILIDAD TRANSITORIA.
3. Usando los voltajes nodales iniciales, todas las cargas se convierten a admitancias
equivalentes a tierra y se asumen a permanecer constantes.
4. Se desprecian las potencias de amortiguamiento.
5. El ángulo del rotor de cada máquina coincide con el ángulo del voltaje detrás de reactancia de
la máquina.
6. Las máquinas de una misma estación que oscilen juntas se dice ser coherentes. Este grupo de
máquinas se representa por una máquina equivalente.
El primer paso en el análisis de estabilidad transitoria es realizar un estudio de flujos, para con ello
conocer las condiciones iniciales del sistema. Las corrientes de las máquinas en condiciones
iniciales (pre-falla) se calculan con la ecuación (2.94).
Si* Pi jQi
Ii *
para i = 1, 2, . . . , m (2.94)
Vi Vi*
donde: m = número de generadores, Vi = voltaje en terminales del i-ésimo generador, Pi y Qi son
las potencias real y reactiva generadas por el i-ésimo generador. Las resistencias de los
generadores se desprecian y los voltajes detrás de reactancia transitoria se obtienen con la ecuación
(2.95).
Ei' Vi j X'd i Ii para i = 1, 2, . . . , m (2.95)
Ahora todas las cargas son convertidas a admitancias equivalentes usando la relación
S L*i PLi jQLi
y Li G Li j BLi (2.96)
Vi2 Vi2
M.C. J.L. LEMUS D. SISTEMAS ELÉCTRICOS DE POTENCIA.
212
INGENIERÍA ELÉCTRICA ANÁLISIS DE ESTABILIDAD TRANSITORIA.
Para incluir los voltajes detrás de reactancias transitorias, se agregan “m” buses a la red de “n”
buses del sistema de potencia. La red equivalente con todas las cargas convertidas a admitancias se
muestra en la figura 2.37
Fig. 2.37. Representación de un S.E.P. para análisis de estabilidad transitoria.
La ecuación de voltajes nodales para esta red con el bus 0 como referencia, está dada por la
ecuación (2.97)
Y11 Y1n Y1(n+1) Y1(n+m) V1
I1 V
I Y21 Y2n Y1(n+2) Y2(n+m) 2
2
Yn1 Vn
In Ynn Yn (n+1) Yn (n+m) (2.97)
E'
I n+1 Y(n+1)1 Y(n+1) n Y(n+1)(n+1) Y(n+1)(n+m) (n+1)
I Y(n+m)1 E(n+m)
n+m Y(n+m) n Y(n+m)(n+1) Y(n+m)(n+m)
'
o bien
I BUS YBUS VBUS (2.98)
M.C. J.L. LEMUS D. SISTEMAS ELÉCTRICOS DE POTENCIA.
213
INGENIERÍA ELÉCTRICA ANÁLISIS DE ESTABILIDAD TRANSITORIA.
Esta ecuación de red se debe de calcular para cada condición de operación (pre-falla, falla y post-
falla). El estudio clásico de estabilidad transitoria se basa en la aplicación de una falla trifásica
sólida en el bus “k”, por lo que Vk = 0. Esto simultáneamente remueve el “k-ésimo” renglón y la
“k-ésima” columna de la matriz de admitancias YBUS. Finalmente, se eliminan todos los buses
excepto los buses de los voltajes internos de los generadores, esto se hace utilizando la fórmula de
reducción de Kron. Para eliminar los buses de carga, la ecuación (2.97) es particionada de tal
manera que los “n” buses que se van a eliminar son representados en los “n” renglones de la parte
superior. Debido a que ninguna corriente entra o sale de los buses de carga, entonces las corrientes
en los “n” renglones son cero. Las corrientes de los generadores se representan por el vector Im y
los voltajes de las cargas y de los generadores se representan por los vectores Vn y E’m,
respectivamente. Entonces, la ecuación (2.97) en términos de sub-matrices es
0 Yn n Yn m Vn
I t ' (2.99)
m Yn m Ym m Em
El vector de voltajes Vn puede ser eliminado por sustitución como sigue:
0 Yn n Vn Yn m Em' (2.100)
I m Ynt m Vn Ymm Em' (2.101)
De la ecuación (2.100), se tiene
Vn Ynn1 Yn m Em' (2.102)
Sustituyendo la ecuación (2.102) en la ecuación (2.101), resulta
I m Ym m Ynt m Ynn1 Yn m Em' (2.103)
M.C. J.L. LEMUS D. SISTEMAS ELÉCTRICOS DE POTENCIA.
214
INGENIERÍA ELÉCTRICA ANÁLISIS DE ESTABILIDAD TRANSITORIA.
Donde la matriz de red YBUS reducida es
YBUS (reducida) Ym m Ynt m Ynn1 Yn m (2.103)
Esta matriz de red reducida tiene las dimensiones de (mxm), donde “m” es el número de
generadores.
La potencia eléctrica generada por cada máquina en términos de los voltajes internos, es
Si Ei' Ii* (2.104)
donde
m
Ii Yi j E'j para i = 1, 2, . . . , m (2.105)
j 1
Ei' Ei' i ; E'j E'j j
Yii = Gii + jBii ; Yi j = Yi j i j
entonces
m
m
Pei Re Ei' Yi*j E'j* Re Ei' i Yi j i j Ei' i (2.106)
j 1
j 1
m
Pei = (Ei' )2 Gi i Ei' Yi j E'j Cos ( i j i j ) (2.107)
j 1
i j
M.C. J.L. LEMUS D. SISTEMAS ELÉCTRICOS DE POTENCIA.
215
INGENIERÍA ELÉCTRICA ANÁLISIS DE ESTABILIDAD TRANSITORIA.
Antes del disturbio (pre-falla) hay un equilibrio entre la potencia mecánica Pm y la potencia
eléctrica Pe, por lo que se tiene
m
Pmi = (Ei' )2 Gi i Ei' Yi j E'j Cos ( 12 1 2 ) (2.108)
j 1
j i
Las ecuaciones del movimiento de los rotores de las máquinas están dadas por las ecuaciones
(2.109) y (2.110)
2Hi di m
0 dt
= Pmi (Ei' ) 2 G i i Ei' Yi j E'j Cos ( i j i j ) (2.109)
j 1
j i
d i
= i = i 0 (2.110)
dt
Ejemplo 2.4. Considere el Sistema de nueve buses mostrado en la figura E2.4a. Los datos
generales de los diferentes elementos se proporcionan en las tablas 2.4 y 2.5 Las tabla 2.6
proporciona los resultados del análisis de flujos de potencia en buses.
Suponga que ocurre una falla trifásica sólida en la línea 5-7 cerca del bus 7 (punto “F”), la cual se
elimina 0.083 segundos después con la apertura de los interruptores de línea correspondiente.
a) Calcule las matrices de admitancias YBUS correspondientes a las condiciones de pre-falla,
falla y post-falla.
b) Calcule las matrices de admitancias YBUS reducidas (donde se indiquen solamente los nodos
internos de los generadores), correspondientes a las condiciones de operación indicadas en el
inciso anterior.
M.C. J.L. LEMUS D. SISTEMAS ELÉCTRICOS DE POTENCIA.
216
INGENIERÍA ELÉCTRICA ANÁLISIS DE ESTABILIDAD TRANSITORIA.
Fig. E2.4a. Sistema de nueve buses para el ejemplo 2.4.
c) Determine las ecuaciones de oscilación para cada máquina en condiciones de falla y de post-
falla.
d) Utilice el método de Runge-Kutta de cuarto orden para resolver las ecuaciones del inciso
anterior, utilizando para ello un paso de integración t = 0.005 seg., y un tiempo de estudio de
2.0 seg. (muestre resultados gráficamente).
TABLA 2.4. Datos de los Generadores.
GENERADOR No. 1 No. 2 No. 3
Potencia nominal (MVA) 247.5 192.0 128.0
Voltaje (KV) 16.5 18.0 13.8
Factor de potencia 1.0 0.85 0.85
Velocidad nominal (RPM) 180 3600 3600
Energía almacenada a
2,364.0 640.0 301.0
velocidad nom. (MW-seg.)
M.C. J.L. LEMUS D. SISTEMAS ELÉCTRICOS DE POTENCIA.
217
INGENIERÍA ELÉCTRICA ANÁLISIS DE ESTABILIDAD TRANSITORIA.
TABLA 2.4. (Continuación).
GENERADOR No. 1 No. 2 No. 3
Tipo Hidráulica Térmica Térmica
Xd 0.1460 0.8958 1.3125
X ’d 0.0608 0.1198 0.1813
Xq 0.0969 0.8645 1.2578
X ’q 0.0969 0.1969 0.2500
NOTA: Los valores de las reactancias están en p.u. en base a 100 MVA.
TABLA 2.5. Datos de los elementos del Sistema.
R X B’/2
ELEMENTO
(p.u.) (p.u.) (p.u.)
1-4 0.0 0.0576 0.0
2-7 0.0 0.0625 0.0
3-9 0.0 0.0586 0.0
4-5 0.0100 0.0850 0.0880
4-6 0.0170 0.0920 0.0790
5-7 0.0320 0.1610 0.1530
6-9 0.0390 0.1700 0.1790
7-8 0.0085 0.0720 0.0745
8-9 0.0119 0.1008 0.1045
TABLA 2.6. Resultados de flujos en buses.
BUS V PG QG PL QL
No. (kV) (MW) (MVAR) (MW) (MVAR)
1 17.160.0 71.6 27.0 0.0 0.0
2 18.459.3 163.0 6.7 0.0 0.0
3 14.1454.7 85.0 -10.9 0.0 0.0
4 235.98-2.2 0.0 0.0 0.0 0.0
5 229.08-4.0 0.0 0.0 125.0 50.0
6 232.99-3.7 0.0 0.0 90.0 30.0
7 235.983.7 0.0 0.0 0.0 0.0
8 233.680.7 0.0 0.0 100.0 35.0
9 237.362.0 0.0 0.0 0.0 0.0
M.C. J.L. LEMUS D. SISTEMAS ELÉCTRICOS DE POTENCIA.
218
INGENIERÍA ELÉCTRICA ANÁLISIS DE ESTABILIDAD TRANSITORIA.
Solución: Cálculos preliminares.
Para preparar los datos para el estudio de estabilidad transitoria, se realizan los siguientes cálculos
preliminares:
1. Todos los datos del sistema se convierten a una base común, normalmente se selecciona una
base de sistema de 100 MVA y voltaje nominal.
2. Las cargas se convierten a admitancias equivalentes constantes en p.u. usando la ecuación
(2.96).
1.025 j0.50
Carga A: y L5 1.2600 j 0.5040
(0.996)2
0.90 j0.30
Carga B: y L6 0.8770 j 0.2923
(1.013)2
1.00 j0.35
Carga C: y L8 0.9690 j 0.3391
(1.016)2
3. Se calculan los voltajes internos de los generadores utilizando la ecuación (2.95).
0.716 j0.27
E1' 1.04 0 ( j 0.0608) = 1.0566 2.27
1.04 0
1.63 j0.067
E'2 1.025 9.3 ( j 0.1198) = 1.0502 19.75
1.025 9.3
0.85 j0.109
E3' 1.025 4.7 ( j 0.1813) = 1.0170 13.20
1.025 4.7
M.C. J.L. LEMUS D. SISTEMAS ELÉCTRICOS DE POTENCIA.
219
INGENIERÍA ELÉCTRICA ANÁLISIS DE ESTABILIDAD TRANSITORIA.
4. Se calculan las matrices de red YBUS correspondientes a las condiciones de pre-falla, falla y
post-falla. Por conveniencia los buses 1, 2 y 3 se usan para los voltajes internos de los
generadores. Los valores de las reactancias de los generadores se suman a las reactancias de
sus respectivos trasformadores. Las admitancias de la red de pre-falla incluyendo las cargas
equivalentes se muestran en la tabla 2.7
Tabla 2.7. Datos de la red de prefalla.
Bus Impedancia Admitancias
No. R X G B
Generadores*
1 1-4 0.0000 0.1184 0.0000 - 8.4459
2 2-7 0.0000 0.1823 0.0000 - 5.4855
3 3-9 0.0000 0.2399 0.0000 - 4.1684
Líneas de
Transmisión
4-5 0.0100 0.0850 1.3652 - 11.6041
4-6 0.0170 0.0920 1.9422 - 10.5107
5-7 0.0320 0.1610 1.1876 - 5.9751
6-9 0.0390 0.1700 1.2820 - 5.5882
7-8 0.0085 0.0720 1.6171 - 13.6980
8-9 0.0119 0.1008 1.1551 - 9.7843
Admitancias
shunt**
Carga A 1.2610 - 0.2634
Carga B 0.877 - 0.0346
Carga C 0.9690 - 0.1601
4-0 0.1670
7-0 0.2275
9-0 0.2835
* Para cada generador la reactancia del transformador se suma a la reactancia del generador.
** Las suceptancias shunt de la líneas son sumadas a las cargas.
M.C. J.L. LEMUS D. SISTEMAS ELÉCTRICOS DE POTENCIA.
220
INGENIERÍA ELÉCTRICA ANÁLISIS DE ESTABILIDAD TRANSITORIA.
Las matrices de admitancias de red YBUS correspondientes a las condiciones de pre-falla, falla y
post-falla se muestran en las tablas 2.8, 2.9 y 2.10, respectivamente.
Tabla 2.8. Matriz de admitancias de red YBUS de pre-falla.
- j8.4459 j8.4459
- j5.4855 j5.4855
- j4.1684 j4.1684
3.3070 - - 1.3652 + - 1.9422 +
j8.4459
j30.3937 j11.6041 j10.5107
- 1.3652 + 3.8138 – - 1.1876 +
j11.6041 j17.8426 j5.9751
- 1.9422 + 4.1019 – - 1.2820 +
j10.5107 j16.1335 j5.5882
- 1.1876 + 2.8047 – - 1.6171 +
j5.4855
j5.9751 j24.9311 j13.6980
- 1.6171 + 3.7412 – - 1.1551 +
j13.6980 j23.6424 j9.7843
- 1.2820 + - 1.1551 + 2.4371 –
j4.1684
j5.5882 j9.7843 j19.2574
Tabla 2.9. Matriz de admitancias de red YBUS de falla.
- j8.4459 j8.4459
- j5.4855
- j4.1684 j4.1684
3.3070 - - 1.3652 + - 1.9422 +
j8.4459
j30.3937 j11.6041 j10.5107
- 1.3652 + 3.8138 –
j11.6041 j17.8426
- 1.9422 + 4.1019 – - 1.2820 +
j10.5107 j16.1335 j5.5882
3.7412 – - 1.1551 +
j23.6424 j9.7843
- 1.2820 + - 1.1551 + 2.4371 –
j4.1684
j5.5882 j9.7843 j19.2574
M.C. J.L. LEMUS D. SISTEMAS ELÉCTRICOS DE POTENCIA.
221
INGENIERÍA ELÉCTRICA ANÁLISIS DE ESTABILIDAD TRANSITORIA.
Tabla 2.10. Matriz de admitancias de red YBUS de post-falla.
- j8.4459 j8.4459
- j5.4855 j5.4855
- j4.1684 j4.1684
3.3070 - - 1.3652 + - 1.9422 +
j8.4459
j30.3937 j11.6041 j10.5107
- 1.3652 + 2.6262 –
j11.6041 j11.8675
- 1.9422 + 4.1019 – - 1.2820 +
j10.5107 j16.1335 j5.5882
1.6171 – - 1.6171 +
j5.4855
j18.9559 j13.6980
- 1.6171 + 3.7412 – - 1.1551 +
j13.6980 j23.6424 j9.7843
- 1.2820 + - 1.1551 + 2.4371 –
j4.1684
j5.5882 j9.7843 j19.2574
5. Aplicando reducción de Kron, se calculan las matrices de admitancias YBUS reducidas, las
cuales se muestran en la tabla 2.11
Tabla 2.11. Matrices de admitancias de red YBUS reducidas.
Tipo de red Bus 1 2 3
Pre-falla 1 0.846 – j2.988 0.287 + j1.513 0.210 + j1.226
2 0.287 + j1.513 0.420 – j2.724 0.213 + j1.088
3 0.210 + j1.226 0.213 + j1.088 0.277 – j2.368
Falla 1 0.657 - j3.816 0.000 + j0.000 0.070 + j0.631
2 0.000 + j0.000 0.000 - j5.486 0.000 + j0.000
3 0.070 + j0.631 0.000 + j0.000 0.174 - j2.796
Post-falla 1 1.181 - j2.229 0.138 + j0.726 0.191 + j1.079
2 0.138 + j0.726 0.389 – j1.953 0.199 + j1.229
3 0.191 + j1.079 0.199 + j1.229 0.273 – j2.342
M.C. J.L. LEMUS D. SISTEMAS ELÉCTRICOS DE POTENCIA.
222
INGENIERÍA ELÉCTRICA ANÁLISIS DE ESTABILIDAD TRANSITORIA.
Cálculos finales.
6. Se determinan las ecuaciones de oscilación para cada máquina en condiciones de falla y de
post-falla.
Usando la matriz YBUS reducida de falla y aplicando la ecuación (2.107), las ecuaciones de
potencia eléctrica durante falla, son:
Pe2 = 0
Pe3 = (E3' )2 G33 E3' E1' Y31 Cos (31 31) E3' E'2Y32 Cos (32 32 )
Pe3 = (E3' )2 G33 E3' E1' Y31 Sen (31 90 31) E3' E'2Y32 Sen (32 90 32 )
Pe3 = (1.017)2 (0.174) (1.017) (1.0566) (0.6349) Sen (31 90 83.67 )
Pe3 = 0.8000 0.6822 Sen (31 6.33 )
Las ecuaciones de potencia eléctrica después de falla, son:
Pe2 = (E'2 )2 G 22 E'2 E1' Y21 Sen ( 21 90 21 ) E'2 E3' Y23 Sen ( 23 90 23 )
Pe2 = (1.0502)2 (0.389) (1.0502) (1.0566) (0.739) Sen ( 21 90 79.23 )
Pe2 = 0.4290 0.800 Sen ( 21 10.77 )
Pe3 = (E3' )2 G33 E3' E1' Y31 Sen (31 90 31) E3' E'2Y32 Sen (32 90 32 )
M.C. J.L. LEMUS D. SISTEMAS ELÉCTRICOS DE POTENCIA.
223
INGENIERÍA ELÉCTRICA ANÁLISIS DE ESTABILIDAD TRANSITORIA.
Pe3 = (1.017)2 (0.273) (1.017) (1.0566) (1.096) Sen ( 31 90 80 )
(1.017) (1.0502) (1.245) Sen ( 32 90 80.8 )
Pe3 = 0.2823 1.1777 Sen (31 10.0 ) 1.330 Sen (31 10.0 )
Las ecuaciones de oscilación durante falla, se determinan usando la ecuación (2.110), resultando
d 2 21 180 f 180 f
2
= (Pm2 Pe2 ) = (1.63)
dt H2 6.4
d 2 31 180 f 180 f
= (Pm3 Pe3 ) = 0.85 0.8000 0.6822 Sen ( 31 6.33 )
dt 2 H3 3.01
d 2 31 180 f
= 0.05 0.6822 Sen ( 31 6.33 )
dt 2 3.01
Las ecuaciones de oscilación durante falla, son:
d 2 21 180 f 180 f
= (Pm2 Pe2 ) = 1.63 0.4290 0.800 Sen ( 21 10.77 )
dt 2 H2 6.4
d 2 21 180 f
= 1.201 0.800 Sen ( 21 10.77 )
dt 2 6.4
d 2 31 180 f
= (Pm3 Pe3 )
dt 2 H3
d 231 180 f
= 0.85 0.2823 1.1777 Sen ( 31 10.0 ) 1.330 Sen ( 31 10.0 )
dt 2 3.01
M.C. J.L. LEMUS D. SISTEMAS ELÉCTRICOS DE POTENCIA.
224
INGENIERÍA ELÉCTRICA ANÁLISIS DE ESTABILIDAD TRANSITORIA.
d 2 31 180 f
= 0.5677 1.1777 Sen ( 31 10.0 ) 1.330 Sen ( 31 10.0 )
dt 2 3.01
7. Se utiliza el método de Runge-Kutta de cuarto orden para resolver las ecuaciones del inciso
anterior, utilizando para ello un paso de integración ∆t=0.005 seg., y un tiempo de estudio de
2.0 seg., los resultados se muestran en forma tabular y gráficamente.
Se usa el toolbox de MatLab que proporciona el libro: “Power System Analysis” de Hadi Saadat
para resolver este tipo de problemas. Se emplea la función ode23 para resolver las ecuaciones de
oscilación y el programa trstab para realizar el análisis de estabilidad transitoria para un sistema
multimáquina, sujeto a una falla trifásica solida.
Para el ejemplo 2.4, el programa le pide al usuario como datos de entrada, el tiempo de
eliminación de la falla (tc or clearing time) y el tiempo de estudio o de simulación (tf or final time),
los cuales se muestran a continuación:
Enter cleaning time of fault in sec. tc = 1/12
Enter final simulation time in sec. tf = 1.1
Fault is cleared at 0.083 Sec.
Los resultados 21(t) y 31(t), gráficamente se muestran en la figura E2.4b.
Observe que el sistema es transitoriamente estable y que la máxima diferencia angular es cerca de
85, este valor corresponde a 12 en t = 0.43 seg.
Ejemplo 2.5. Considere el sistema de seis buses mostrado en la figura E2.5a. Los datos generales
de los diferentes elementos se proporcionan en las tablas 2.12 y 2.13. El voltaje nominal en el lado
de alta tensión de los transformadores, es de 115 kV.
M.C. J.L. LEMUS D. SISTEMAS ELÉCTRICOS DE POTENCIA.
225
INGENIERÍA ELÉCTRICA ANÁLISIS DE ESTABILIDAD TRANSITORIA.
Fig. E2.4b. Diferencias angulares en función del tiempo para el ejemplo 2.4.
Fig. E2.5a Diagrama unifilar del sistema de seis buses para el ejemplo 2.5
M.C. J.L. LEMUS D. SISTEMAS ELÉCTRICOS DE POTENCIA.
226
INGENIERÍA ELÉCTRICA ANÁLISIS DE ESTABILIDAD TRANSITORIA.
Tabla 2.12. Datos de los generadores.
GENERADOR No. 1 No. 2 No. 3
Potencia nominal (MVA) 400.0 250.0 200.0
Voltaje (kV) 20.0 18.0 13.8
factor de potencia 1.0 0.85 0.85
Velocidad nominal (RPM) 180 3,600 3,600
Energía almacenada a
8,000.0 1,000.0 1,000.0
velocidad nom. (MW-seg.)
Tipo Hidráulica Térmica Térmica
X’d 0.2000 0.1500 0.2500
NOTA: Los valores de las reactancias están sobre una base de 100 MVA.
TABLA 2.13. Datos de los elementos del sistema.
R X B/2
ELEMENTO
p.u. p.u. p.u.
LT-1 0.035 0.225 0.0065
LT-2 0.025 0.105 0.0045
LT-3 0.040 0.215 0.0055
LT 4 0.028 0.125 0.0035
LT-5 0.026 0.175 0.0300
T1 0.0 0.035 0.0000
T2 0.0 0.042 0.0000
Potencias demandadas:
SL4 = 100 + j 70 MVA SL5 = 90 + j 30 MVA SL6 = 160 + j 110 MVA
Suponga que ocurre una falla trifásica sólida en la Línea LT-5, (cerca del bus 6), la cual se elimina
con la apertura simultánea de sus respectivos interruptores
M.C. J.L. LEMUS D. SISTEMAS ELÉCTRICOS DE POTENCIA.
227
INGENIERÍA ELÉCTRICA ANÁLISIS DE ESTABILIDAD TRANSITORIA.
a) Calcule las matrices de admitancias YBUS correspondientes a las condiciones de pre-falla,
falla y post-falla
b) Calcule las matrices de admitancias YBUS reducidas (donde se indiquen solamente los nodos
internos de los generadores), correspondientes a las condiciones de operación indicadas en el
inciso anterior.
c) Determine si el sistema es o no estable, para un tiempo de duración de falla de 0.4 seg. y un
periodo de estudio de 1.5 seg.
e) Grafique los desplazamientos angulares 21, y 31 correspondientes a los incisos (c) y (d).
Solución: Se usa el toolbox de MatLab que proporciona el libro: “Power System Analysis” de
Hadi Saadat para resolver este tipo de problemas, obteniendo los siguientes resultados:
Power Flow Solution by Newton-Raphson Method
Maximum Power Mismatch = 1.80187e-007
No. of Iterations = 4
Table 2.14. The power flow solution.
BUS V PG QG PD QD
No. (kV) (MW) (MVAR) (MW) (MVAR)
1 21.200.000 105.287 107.335 0.000 0.000
2 18.721.470 150.000 99.771 0.000 0.000
3 14.2140.800 100.000 35.670 0.000 0.000
4 231.84-1.401 0.000 0.000 100.000 70.000
5 233.68-1.499 0.000 0.000 90.000 30.000
6 216.43-5.607 0.000 0.000 160.000 110.000
TOTAL 355.287 242.776 350.000 210.000
M.C. J.L. LEMUS D. SISTEMAS ELÉCTRICOS DE POTENCIA.
228
INGENIERÍA ELÉCTRICA ANÁLISIS DE ESTABILIDAD TRANSITORIA.
b) Las matrices de admitancias de red YBUS reducidas para las diferentes condiciones son:
Ybf =
Table 2.15. Reduced pre-fault bus admittance matrix.
Bus 7 8 9
7 0.3517 – j2.8875 0.2542 + j1.1491 0.1925 + j0.9856
8 0.2542 + j1.1491 0.5435 – j2.8639 0.1847 + j0.6904
9 0.1925 + j0.9856 0.1847 + j0.6904 0.2617 – j2.2835
Los voltajes internos y las potencias de entrada de los generadores son:
G(i) E'(i) 0(i) Pm(i)
1 1.2781 8.9421 1.0529
2 1.2035 11.8260 1.5000
3 1.1427 13.0644 1.0000
Enter faulted bus No. -> 6
Ypf =
Table 2.16. Reduced faulted bus admittance matrix.
Bus 7 8 9
7 0.1913 – j3.4859 0.0605 + j0.3644 0.0523 + j0.4821
8 0.0605 + j0.3644 0.3105 – j3.7467 0.0173 + j0.1243
9 0.0523 + j0.4821 0.0173 + j0.1243 0.1427 – j2.6463
Fault is cleared by opening a line. The bus to bus numbers of line to be removed must be entered
within brackets, e.g. [5,7]
Enter the bus to bus Nos. of line to be removed -> [5,6]
M.C. J.L. LEMUS D. SISTEMAS ELÉCTRICOS DE POTENCIA.
229
INGENIERÍA ELÉCTRICA ANÁLISIS DE ESTABILIDAD TRANSITORIA.
Yaf =
Table 2.16. Reduced faulted bus admittance matrix.
Bus 7 8 9
7 0.3392 – j2.8879 0.2622 + j1.1127 0.1637 + j1.0251
8 0.2622 + j1.1127 0.6020 – j2.7813 0.1267 + j0.5401
9 0.1637 + j1.0251 0.1267 + j0.5401 0.2859 – j2.0544
c) Resultados del análisis de estabilidad transitoria para un tiempo de duración de falla de tc =
0.4 seg., se muestran en la figura 2.51
Phase angle difference of each machine with respect to the slack in degree.
Fig. E2.5b. Phase angle difference (fault cleared at 0.4 sec).
Enter clearing time of fault in sec. tc = 0.4
M.C. J.L. LEMUS D. SISTEMAS ELÉCTRICOS DE POTENCIA.
230
INGENIERÍA ELÉCTRICA ANÁLISIS DE ESTABILIDAD TRANSITORIA.
Enter final simulation time in sec. tf = 1.5
Fault is cleared at 0.400 Sec.
d) Resultados del análisis de estabilidad transitoria para un tiempo de duración de falla de tc =
0.5 seg., se muestran en la figura 2.52
Enter clearing time of fault in sec. tc = 0.5
Enter final simulation time in sec. tf = 1.5
Fault is cleared at 0.500 Sec.
Phase angle difference of each machine with respect to the slack in degree.
Fig. E2.5c. Phase angle difference (fault cleared at 0.5 sec).
M.C. J.L. LEMUS D. SISTEMAS ELÉCTRICOS DE POTENCIA.
231
Вам также может понравиться
- MF1161_3 - Electrotécnia para instalaciones térmicasОт EverandMF1161_3 - Electrotécnia para instalaciones térmicasОценок пока нет
- Informe Estabilidad de Sistemas de PotenciaДокумент5 страницInforme Estabilidad de Sistemas de PotenciaBryan VarelaОценок пока нет
- Estudio de Estabilidad de Pequeña SeñalДокумент0 страницEstudio de Estabilidad de Pequeña SeñalDennis José PlazaОценок пока нет
- Estabilidad - CLASE 1 PDFДокумент30 страницEstabilidad - CLASE 1 PDFPool Martinez AlejandroОценок пока нет
- SECCIONAMIENTO DE CARGA Y EAC-BFДокумент8 страницSECCIONAMIENTO DE CARGA Y EAC-BFNear RiverОценок пока нет
- Ecuación de Oscilación Del Generador y Métodos de Solución Listo2Документ10 страницEcuación de Oscilación Del Generador y Métodos de Solución Listo2Luysyñño ChОценок пока нет
- Análisis de Estabilidad TransitoriaДокумент11 страницAnálisis de Estabilidad TransitoriaChristian RuedaОценок пока нет
- Resumen Distribucion de Cargas Entre Unidades Dentro de Una Central GeneradoraДокумент6 страницResumen Distribucion de Cargas Entre Unidades Dentro de Una Central GeneradoraLuis BayasОценок пока нет
- Inercia en Sistemas Eléctricos de PotenciaДокумент8 страницInercia en Sistemas Eléctricos de PotenciaAld Miguel OОценок пока нет
- Transitorios IntroducionДокумент25 страницTransitorios IntroducionFuentez Jayko100% (1)
- Fenómenos TransitoriosДокумент35 страницFenómenos TransitoriosAngel FullerОценок пока нет
- Localizador de Fallas Utilizando SincrofasoresДокумент8 страницLocalizador de Fallas Utilizando SincrofasoresTamatiá ColmánОценок пока нет
- Optimización turbina Pelton central MantaroДокумент24 страницыOptimización turbina Pelton central MantaroAlex PAОценок пока нет
- TEC-725 Asignación 1 UNAPECДокумент7 страницTEC-725 Asignación 1 UNAPECnestorw16Оценок пока нет
- Estabilidad Del Ángulo Del RotorДокумент19 страницEstabilidad Del Ángulo Del RotorHannu Portillo100% (2)
- Características Del Análisis de Estabilidad en SEPДокумент30 страницCaracterísticas Del Análisis de Estabilidad en SEPsedepes100% (1)
- Agc - Control Automatico de La GeneracionДокумент61 страницаAgc - Control Automatico de La GeneracionCristhian StalinОценок пока нет
- Cuestionario #2-RespuestasДокумент17 страницCuestionario #2-RespuestasJuan Miguel Mendoza Mantuano100% (1)
- Transitorios ImpulsivosДокумент2 страницыTransitorios ImpulsivosJulio M. Lucia LichtmannОценок пока нет
- Regulación Automática de TensiónДокумент5 страницRegulación Automática de TensiónBlass LehmannОценок пока нет
- Cálculo flujos potencia estabilidad SEPДокумент57 страницCálculo flujos potencia estabilidad SEPKathya RoldanОценок пока нет
- Análisis de flujos de carga y representación de la SEPДокумент25 страницAnálisis de flujos de carga y representación de la SEPAbdiell Cabrera SanchezОценок пока нет
- Criterio de Igualdad de Areas para Analisis de Estabilidad TransitoriaДокумент1 страницаCriterio de Igualdad de Areas para Analisis de Estabilidad TransitoriaJavier SanchezОценок пока нет
- Practica 1 SP - 1 - 2020Документ5 страницPractica 1 SP - 1 - 2020Javi Martinez0% (1)
- Medidas de control clásico: tiempo de ascenso, máximo, estabilización y sobrepasoДокумент18 страницMedidas de control clásico: tiempo de ascenso, máximo, estabilización y sobrepasorodrigo sepulvedaОценок пока нет
- Facts Sistemas Flexibles de Transmision de Corriente Alterna FlexibleДокумент6 страницFacts Sistemas Flexibles de Transmision de Corriente Alterna FlexibleLuis MiguelОценок пока нет
- TC y TPДокумент17 страницTC y TParmisterioОценок пока нет
- 4 Sobretensiones PDFДокумент137 страниц4 Sobretensiones PDFcristianОценок пока нет
- Acoplamiento en Paralelo de Generadores Con Excitación CompoundДокумент7 страницAcoplamiento en Paralelo de Generadores Con Excitación Compoundtumiamor5Оценок пока нет
- D028-Metodología para El Cálculo de Equivalentes de Red Multipuerto en Estado Estable y Representación en Sistemas Eléctricos de SubtransmДокумент17 страницD028-Metodología para El Cálculo de Equivalentes de Red Multipuerto en Estado Estable y Representación en Sistemas Eléctricos de SubtransmJesus Ortiz LopezОценок пока нет
- Articulo de Evolucion de Los RelesДокумент5 страницArticulo de Evolucion de Los RelesCarlos Sucasaire ChuraОценок пока нет
- 10 - Alcances Estudios OperatividadДокумент5 страниц10 - Alcances Estudios OperatividadAlonso DelgadoОценок пока нет
- Variador de Velocidad y UPSДокумент6 страницVariador de Velocidad y UPSMario GomezОценок пока нет
- 2.3 Transitorios de Conmutacion Simple EE-53Документ27 страниц2.3 Transitorios de Conmutacion Simple EE-53Omar RamirezОценок пока нет
- Estabilidad Pequeña SeñalДокумент18 страницEstabilidad Pequeña Señaljhussen17Оценок пока нет
- Trabajo ReconectadorДокумент7 страницTrabajo ReconectadorrickojiОценок пока нет
- Flujo potencia análisisДокумент1 страницаFlujo potencia análisisjose_love_1990Оценок пока нет
- Practi 1Документ30 страницPracti 1Douglas Javier ReyesОценок пока нет
- Control flujo potencia PSTДокумент29 страницControl flujo potencia PSTFrancisco Arredondo100% (1)
- Metodo Punto Por PuntoДокумент55 страницMetodo Punto Por PuntoJhiro Pareja100% (1)
- Informe 1 - Alto VoltajeДокумент7 страницInforme 1 - Alto VoltajeDamari RiveraОценок пока нет
- Seminario #2 Estimacion de EstadoДокумент26 страницSeminario #2 Estimacion de EstadoTomas Roa100% (1)
- Apuntes Electricos de PotenciaДокумент5 страницApuntes Electricos de PotenciaAnonymous BJMvQF3OmОценок пока нет
- Capitulo 2.8 Estabilidad MultimaquinasДокумент16 страницCapitulo 2.8 Estabilidad Multimaquinasmayquer lin delgadillo perez100% (1)
- Sistema de Medición en Alta TensiónДокумент19 страницSistema de Medición en Alta TensiónElectrical12100% (1)
- Modelo líneas transmisiónДокумент37 страницModelo líneas transmisiónManuel CabreraОценок пока нет
- Generalidades sobre armónicosДокумент24 страницыGeneralidades sobre armónicoselectrofuerteОценок пока нет
- Ejemplo de Cortocircuito ANSIДокумент26 страницEjemplo de Cortocircuito ANSIjaliesispОценок пока нет
- Sistemas de Protección para Líneas de Transmisión 220kVДокумент109 страницSistemas de Protección para Líneas de Transmisión 220kVJorge AguayoОценок пока нет
- Compensadores PDFДокумент9 страницCompensadores PDFηχητικός σκιάОценок пока нет
- Fallas SimetricasДокумент7 страницFallas SimetricasCristian Olguin CornejoОценок пока нет
- Normas de Corto CircuitoДокумент12 страницNormas de Corto CircuitoLuis Bayas100% (1)
- Toroide Cadena de AisladoresДокумент9 страницToroide Cadena de AisladoresmemohsОценок пока нет
- Filtros de SecuenciaДокумент2 страницыFiltros de SecuenciaadanjpmОценок пока нет
- 11 OCSEP Estabilidad TransitoriaДокумент29 страниц11 OCSEP Estabilidad TransitoriaphilipОценок пока нет
- Análisis de La Curva Information Technology Industry Tarea de Calidad 555555555555Документ17 страницAnálisis de La Curva Information Technology Industry Tarea de Calidad 555555555555Mario isaac ResendizОценок пока нет
- Criterio de Estabilidad de Areas IgualesДокумент21 страницаCriterio de Estabilidad de Areas IgualesMarcoRodriguezОценок пока нет
- Seguridad en Un Sistema de PotenciaДокумент10 страницSeguridad en Un Sistema de PotenciaSalas YohenderОценок пока нет
- Trabajo de Runge Kuttaa FinalДокумент18 страницTrabajo de Runge Kuttaa Finaleduardoorday100% (1)
- Estabilidad Dinamica y EstaticaДокумент61 страницаEstabilidad Dinamica y EstaticacjclaveroОценок пока нет
- Catalogo Conexiones Dewit PDFДокумент82 страницыCatalogo Conexiones Dewit PDFMoody HankОценок пока нет
- Simbologia Neumática e HidraúlicaДокумент10 страницSimbologia Neumática e Hidraúlicarpo2010100% (15)
- Nom 001 Sede 2005Документ784 страницыNom 001 Sede 2005bibiana8593Оценок пока нет
- Solicitud Beca A. ENERO17-FormДокумент1 страницаSolicitud Beca A. ENERO17-FormMartinОценок пока нет
- Temario - Pruebas y Mantenimiento de Equipo ElectricoДокумент13 страницTemario - Pruebas y Mantenimiento de Equipo ElectricoMartinОценок пока нет
- Presentacion Sensores de PresionДокумент24 страницыPresentacion Sensores de PresionMartinОценок пока нет
- MeggerДокумент55 страницMeggerReynaldo MarcaОценок пока нет
- CTM990421TL9CC0000017909Документ1 страницаCTM990421TL9CC0000017909MartinОценок пока нет
- Calendario 2018 PDFДокумент1 страницаCalendario 2018 PDFMartinОценок пока нет
- Estudio de Cortocircuito: 2.1 IntroduccionДокумент19 страницEstudio de Cortocircuito: 2.1 IntroduccionMartinОценок пока нет
- Chevrolet Corsa 2001 Manual Del Usuario - 120pag EspДокумент161 страницаChevrolet Corsa 2001 Manual Del Usuario - 120pag EspJairo Aharon Paredes Villarroel93% (15)
- Ejercicios PotenciaДокумент32 страницыEjercicios PotenciaMartinОценок пока нет
- Cálculo de Secciones de Líneas EléctricasДокумент5 страницCálculo de Secciones de Líneas EléctricasMartinОценок пока нет
- Normas Isa y SamaДокумент1 страницаNormas Isa y SamaMartinОценок пока нет
- Control II PDFДокумент9 страницControl II PDFMartin0% (1)
- Perfil-Objetivo Ingenieria Electrica PDFДокумент1 страницаPerfil-Objetivo Ingenieria Electrica PDFMartinОценок пока нет
- TemarioCB PDFДокумент12 страницTemarioCB PDFMartinОценок пока нет
- Reglamento de La Lgeepa en Materia de Ordenamiento EcologicoДокумент26 страницReglamento de La Lgeepa en Materia de Ordenamiento EcologicoMariela LazcanoОценок пока нет
- Catalogo Dewalt PDFДокумент126 страницCatalogo Dewalt PDFMartinОценок пока нет
- Formulario MatematicasДокумент16 страницFormulario Matematicasoliver270694Оценок пока нет
- Formulario Matemáticas 2015Документ15 страницFormulario Matemáticas 2015israelramirezgОценок пока нет
- Fisica 2Документ5 страницFisica 2Norkis MejiasОценок пока нет
- Examen departamental problemas físicaДокумент4 страницыExamen departamental problemas físicaPablo Martin Cadena0% (1)
- DEBER Ejercicios RelatividadДокумент2 страницыDEBER Ejercicios Relatividadedu_manceroОценок пока нет
- Tarea 1 de CinematicaДокумент9 страницTarea 1 de CinematicakellinetwОценок пока нет
- 2023 Parte B Integrador Unidades 1-4Документ9 страниц2023 Parte B Integrador Unidades 1-4eeeluz288Оценок пока нет
- Lab N°3 UNI - VELOCIDAD INSTANTÁNEA Y ACELERACÍONДокумент16 страницLab N°3 UNI - VELOCIDAD INSTANTÁNEA Y ACELERACÍONAngel Enoc Gutiérrez AranibarОценок пока нет
- Ejercicios MRUДокумент4 страницыEjercicios MRUJulio ChávezОценок пока нет
- Tercero Medio Movimiento Circular, Gravitación, Leyes de Kepler y DinámicaДокумент11 страницTercero Medio Movimiento Circular, Gravitación, Leyes de Kepler y DinámicaMina GuillerminaОценок пока нет
- PLANIFICACION ESTUDIANTE 6 Al 10 de DicДокумент35 страницPLANIFICACION ESTUDIANTE 6 Al 10 de DicByron OrtizОценок пока нет
- Calculo y Diseño de Levas (Presentacion) FFFДокумент25 страницCalculo y Diseño de Levas (Presentacion) FFFOscar Mamani Layme100% (2)
- Guia II Cinematica Nutricion 2018Документ10 страницGuia II Cinematica Nutricion 2018Patricio Grandón NeculmanОценок пока нет
- Proyecto Final Calculo Aplicado A La Fisica 1Документ11 страницProyecto Final Calculo Aplicado A La Fisica 1Christofer Murillo UrdaniviaОценок пока нет
- Cinematica y DinamicaДокумент15 страницCinematica y DinamicaEDWIN AQUICE .AОценок пока нет
- Guia 2 Fisica 10 PDFДокумент21 страницаGuia 2 Fisica 10 PDFSWEETОценок пока нет
- Vdocuments - MX - Componentes Rectangulares de La Velocidad y de La AceleracionДокумент5 страницVdocuments - MX - Componentes Rectangulares de La Velocidad y de La AceleracionAbel ColungaОценок пока нет
- Laboratorio 3,4,5,6Документ13 страницLaboratorio 3,4,5,6MarcelaHolguinОценок пока нет
- Cinematica Con SolusДокумент8 страницCinematica Con SolusAlberto MaciasОценок пока нет
- FISICAДокумент4 страницыFISICAMAURICIO RIGOBERTO CHICAIZA QUINATOAОценок пока нет
- Maniobras de Puerto Trabajo de Piloto PDFДокумент94 страницыManiobras de Puerto Trabajo de Piloto PDFLuis Alberto González SalgadoОценок пока нет
- Trabajo de McuДокумент6 страницTrabajo de McuDiego HerreraОценок пока нет
- F1 S03 PPT Movimiento CircularДокумент19 страницF1 S03 PPT Movimiento CircularJosé Antonio Ramos MuñozОценок пока нет
- Medidas de caudal: Principios y tipos de medidores volumétricosДокумент28 страницMedidas de caudal: Principios y tipos de medidores volumétricosFer CarrascoОценок пока нет
- Física: Ciclo Anual San Marcos Plana de FísicaДокумент12 страницFísica: Ciclo Anual San Marcos Plana de FísicaBortex FF pero con panasОценок пока нет
- Aceleracion CentripetaДокумент6 страницAceleracion CentripetaMarc LopОценок пока нет
- 004 Cinematic AДокумент2 страницы004 Cinematic AIvan Lenin Rivera Rodriguez100% (1)
- Problemas1º Bach Vectores ResueltosДокумент7 страницProblemas1º Bach Vectores ResueltosJorge FranciscoОценок пока нет
- Material Complementario de Trabajo Con VectoresДокумент5 страницMaterial Complementario de Trabajo Con Vectoresvirginia cambiassoОценок пока нет
- F1º IiДокумент80 страницF1º IiGonzalo FonsecaОценок пока нет
- Universidad Autónoma de Nuevo León Facultad de Ingeniería Mecánica Eléctrica Física IVДокумент7 страницUniversidad Autónoma de Nuevo León Facultad de Ingeniería Mecánica Eléctrica Física IVMarco SotoОценок пока нет
- Practica 2 Palmira S1 Grupo 2 FisicaДокумент17 страницPractica 2 Palmira S1 Grupo 2 FisicaAlexanderОценок пока нет