Вам также может понравиться
- Práctica 1 Analisis de Circuitos ElectricosДокумент8 страницPráctica 1 Analisis de Circuitos Electricosinterceptor58Оценок пока нет
- P3 CP-AcircuitosДокумент4 страницыP3 CP-AcircuitosMarcos EspinozaОценок пока нет
- Informe de PasantiasДокумент18 страницInforme de PasantiasjannelyОценок пока нет
- Triptico - Historia Del Numero Pi (Office 2007) OkДокумент2 страницыTriptico - Historia Del Numero Pi (Office 2007) Okchangos2013100% (3)
- 2.-Cortes de Cabello para Todos Los Tipos de Rostro PDFДокумент11 страниц2.-Cortes de Cabello para Todos Los Tipos de Rostro PDFPauly Bustamante0% (1)
- Evaluacion de Los GriegosДокумент2 страницыEvaluacion de Los GriegosTannieMárquezMolina100% (1)
- 3 PCSДокумент21 страница3 PCSJemsen ChapoñanОценок пока нет
- TCyME Guión Práctica 2 - Curso 2023-24Документ5 страницTCyME Guión Práctica 2 - Curso 2023-24Hassan JamaaОценок пока нет
- Practica 7Документ4 страницыPractica 7Jairo FernandezОценок пока нет
- Practica 7Документ4 страницыPractica 7AndrésVásconezОценок пока нет
- Practica 9Документ3 страницыPractica 9AndrésVásconezОценок пока нет
- Practica 8Документ5 страницPractica 8Paúl SánchezОценок пока нет
- Practica 2 Sistemas Analogicos 1659B Gomez Ortega Marco Antonio (GOMA)Документ9 страницPractica 2 Sistemas Analogicos 1659B Gomez Ortega Marco Antonio (GOMA)soyuncreeperyunenderОценок пока нет
- Laboratorio N°1Документ12 страницLaboratorio N°1aleomcalderonОценок пока нет
- Practica5 LabInds UrielVarelaДокумент19 страницPractica5 LabInds UrielVarelaRicardo TorresОценок пока нет
- Practica - Lab - Med - ElectДокумент9 страницPractica - Lab - Med - ElectAndrea GarciaОценок пока нет
- Guía 9 - Circuitos RC (ELVIS)Документ5 страницGuía 9 - Circuitos RC (ELVIS)Oriel MojicaОценок пока нет
- Deber3 Fundamentos de Circuitos EPNДокумент8 страницDeber3 Fundamentos de Circuitos EPNJefferJoeJacomeUvillus100% (1)
- Determinacion de La Curva de Energia EspecificaДокумент8 страницDeterminacion de La Curva de Energia EspecificaMartinez Mart Martinez50% (2)
- Tu Macho KcheroДокумент21 страницаTu Macho KcheroDarwin JoelОценок пока нет
- ElectrotecniaДокумент11 страницElectrotecniaMiguel Alejandro SoméОценок пока нет
- Practica 8Документ5 страницPractica 8Cris 97Оценок пока нет
- Final Fisica II 15-05-09Документ1 страницаFinal Fisica II 15-05-09Recox 999Оценок пока нет
- Practica 6Документ5 страницPractica 6Ricardo TorresОценок пока нет
- Informe Final 2Документ20 страницInforme Final 2Jhoseph ChangОценок пока нет
- Ef-Ee615m 2020 1Документ3 страницыEf-Ee615m 2020 1Jossue OlivaresОценок пока нет
- Practica 5 Quispe Delgado Alexis PDFДокумент8 страницPractica 5 Quispe Delgado Alexis PDFXcaroОценок пока нет
- Practica 10Документ3 страницыPractica 10Alexis cОценок пока нет
- P8 - Lab. Fundamentos de Circuitos - 2021AДокумент4 страницыP8 - Lab. Fundamentos de Circuitos - 2021AChris A RuedaОценок пока нет
- Practica 2.1 FiltrosДокумент9 страницPractica 2.1 FiltrosAndres UrgilezОценок пока нет
- Informe#5Документ10 страницInforme#5Josué David SarabiaОценок пока нет
- Laboratorio 2Документ13 страницLaboratorio 2Jerry ValdezОценок пока нет
- PC3 Maquel UTP Marzo 2022 3002Документ3 страницыPC3 Maquel UTP Marzo 2022 3002luisОценок пока нет
- Practicas de Electronic A Analogica IДокумент74 страницыPracticas de Electronic A Analogica Iveracru876Оценок пока нет
- Practica 06 Easycalculation - Com-Microstrip Informe FinalДокумент22 страницыPractica 06 Easycalculation - Com-Microstrip Informe FinalmanuelОценок пока нет
- 2003 PTC EnunciadosДокумент29 страниц2003 PTC EnunciadosCHugo DavalosОценок пока нет
- Practica 3Документ1 страницаPractica 3Luis Del Rosario100% (1)
- Generador en Alta Tension en CDДокумент23 страницыGenerador en Alta Tension en CDPancho1407Оценок пока нет
- Informe Laboratorio 2 AnalogaДокумент12 страницInforme Laboratorio 2 AnalogaFabián Andrés Salgado MejíaОценок пока нет
- Laboratorio 2.0 Digitales I AДокумент6 страницLaboratorio 2.0 Digitales I ALuiz GerardoОценок пока нет
- Lab3 CONTROL DIGTAL 2020AДокумент3 страницыLab3 CONTROL DIGTAL 2020ACésar Jesús AlcaláОценок пока нет
- Laboratorio 1 C. Electronicos IДокумент8 страницLaboratorio 1 C. Electronicos IjessicajulissaОценок пока нет
- Selectividad Electrotecnia Andalucia 2003-2014+directricesДокумент151 страницаSelectividad Electrotecnia Andalucia 2003-2014+directricesisidroasОценок пока нет
- Problemas para Elt 2580 Elt 2570 Tiempo 1Документ3 страницыProblemas para Elt 2580 Elt 2570 Tiempo 1Jamil Rodri ChoqueОценок пока нет
- Calibracion de Tunel de SuccionДокумент10 страницCalibracion de Tunel de SuccionAlfonso Trillanes Ruiz0% (1)
- Laboratorio 1 Fundamentos ElectronicaДокумент16 страницLaboratorio 1 Fundamentos ElectronicaJUAN JOSE TURGA PARADAОценок пока нет
- Lab 20 SantosДокумент8 страницLab 20 SantosSebastian VelardeОценок пока нет
- Laboratorio - 01-2020-SCDДокумент3 страницыLaboratorio - 01-2020-SCDJuan Manuel VargasОценок пока нет
- 01 Guia Lab1 SenatiДокумент8 страниц01 Guia Lab1 SenatiCarlos Eduardo Segura VillarrealОценок пока нет
- Prelaboratorio 5Документ3 страницыPrelaboratorio 5Ricardo TorresОценок пока нет
- Practica II Parcial IE-0309Документ8 страницPractica II Parcial IE-0309Esteban AriasОценок пока нет
- Reconocimiento de Elementos Eléctricos e Instrumentos de Medición en LaboratorioДокумент8 страницReconocimiento de Elementos Eléctricos e Instrumentos de Medición en LaboratorioFabricio Veintimilla BautistaОценок пока нет
- Tema de La Práctica Calificada 02Документ4 страницыTema de La Práctica Calificada 02¿De Dónde Soy? Nose xdОценок пока нет
- Cuaderno de Ejercicios de Introducción A La Teoría de Control PDFДокумент37 страницCuaderno de Ejercicios de Introducción A La Teoría de Control PDFMenelao ZubiriОценок пока нет
- Inf 4 LB CircuitosДокумент30 страницInf 4 LB CircuitosBrendaCastroОценок пока нет
- Ejercicios Propuestos - Tercer Parcial PDFДокумент5 страницEjercicios Propuestos - Tercer Parcial PDFJosue VivasОценок пока нет
- Ejercicios Propuestos - Tercer Parcial PDFДокумент5 страницEjercicios Propuestos - Tercer Parcial PDFJhonny James Flores OrtegaОценок пока нет
- Ejercicios Propuestos - Tercer Parcial PDFДокумент5 страницEjercicios Propuestos - Tercer Parcial PDFPaula MorilloОценок пока нет
- Ejercicios Propuestos - Tercer Parcial PDFДокумент5 страницEjercicios Propuestos - Tercer Parcial PDFAbdielJimenezAlarconОценок пока нет
- Ejercicios Propuestos - Tercer Parcial PDFДокумент5 страницEjercicios Propuestos - Tercer Parcial PDFPaula MorilloОценок пока нет
- Ejercicios Propuestos - Tercer Parcial PDFДокумент5 страницEjercicios Propuestos - Tercer Parcial PDFJosue VivasОценок пока нет
- Ejercicios Propuestos - Tercer ParcialДокумент5 страницEjercicios Propuestos - Tercer ParcialJosue VivasОценок пока нет
- ProblemasUT2 2010Документ16 страницProblemasUT2 2010Edgar BarreraОценок пока нет
- Ee524m P4 20201Документ2 страницыEe524m P4 20201Armando CajahuaringaОценок пока нет
- EE524M Practica 3Документ1 страницаEE524M Practica 3Armando CajahuaringaОценок пока нет
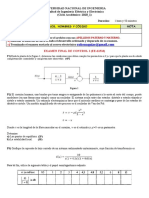
- Universidad Nacional de IngenieríaДокумент2 страницыUniversidad Nacional de IngenieríaArmando Cajahuaringa100% (1)
- Ee524 Exfi 20162Документ1 страницаEe524 Exfi 20162Armando CajahuaringaОценок пока нет
- DSP P1 Ip 2013-2Документ7 страницDSP P1 Ip 2013-2Armando CajahuaringaОценок пока нет
- DSP P1 Conv2Документ3 страницыDSP P1 Conv2Armando CajahuaringaОценок пока нет
- EE612 - Preguntas para El Examen de RegularizacionДокумент1 страницаEE612 - Preguntas para El Examen de RegularizacionArmando CajahuaringaОценок пока нет
- DSP Lab7 2013-2Документ1 страницаDSP Lab7 2013-2Armando CajahuaringaОценок пока нет
- DSP TestP1 2014-2Документ1 страницаDSP TestP1 2014-2Armando CajahuaringaОценок пока нет
- DSP Practica3 2013-3Документ6 страницDSP Practica3 2013-3Armando CajahuaringaОценок пока нет
- DSP - Curso en Videos1Документ5 страницDSP - Curso en Videos1Armando CajahuaringaОценок пока нет
- Ee-610 Analisis de Senales y de SistemasДокумент2 страницыEe-610 Analisis de Senales y de SistemasArmando CajahuaringaОценок пока нет
- DSP ExRegularizacion 2013-2Документ1 страницаDSP ExRegularizacion 2013-2Armando CajahuaringaОценок пока нет
- DSP Exfi 2016-1Документ1 страницаDSP Exfi 2016-1Armando CajahuaringaОценок пока нет
- DSP Ex Sust 20162Документ1 страницаDSP Ex Sust 20162Armando CajahuaringaОценок пока нет
- C04 Obtencion Experimental de Parametros de SistemasДокумент24 страницыC04 Obtencion Experimental de Parametros de SistemasArmando CajahuaringaОценок пока нет
- S&S TestP2VI 20181Документ1 страницаS&S TestP2VI 20181Armando CajahuaringaОценок пока нет
- S&S TestP1JU 2012-2Документ1 страницаS&S TestP1JU 2012-2Armando CajahuaringaОценок пока нет
- S&S - TestP2J 2012 2Документ1 страницаS&S - TestP2J 2012 2Armando CajahuaringaОценок пока нет
- S&S P3 2012-2Документ2 страницыS&S P3 2012-2Armando CajahuaringaОценок пока нет
- S&S L4B 2011-1Документ2 страницыS&S L4B 2011-1Armando CajahuaringaОценок пока нет
- S&S TestP2VI 20181Документ1 страницаS&S TestP2VI 20181Armando CajahuaringaОценок пока нет
- 05 SemanaДокумент3 страницы05 SemanaArmando CajahuaringaОценок пока нет
- Prctica1 170515064226Документ7 страницPrctica1 170515064226LAYLA MARRUFO PEREZОценок пока нет
- Sistemas de EcuacionesДокумент11 страницSistemas de EcuacionesMogrobejo Coro RimberОценок пока нет
- 2.6 PLAN DE BLOQUE 6to. MatemáticaДокумент18 страниц2.6 PLAN DE BLOQUE 6to. MatemáticaEduardo BernardiОценок пока нет
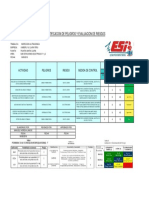
- Matriz Iper Kimberly & Clark Santa Clara UltrasonidoДокумент1 страницаMatriz Iper Kimberly & Clark Santa Clara UltrasonidoPedro Martín0% (1)
- Formato de Informe Agosto 2020Документ5 страницFormato de Informe Agosto 2020alejandro constantinoОценок пока нет
- Cuestionario Inicial 4 Laboratorio de Fundamentos de Mecánica FES AragonДокумент8 страницCuestionario Inicial 4 Laboratorio de Fundamentos de Mecánica FES AragonJosué González MacíasОценок пока нет
- Grabar Audio Desde MatlabДокумент1 страницаGrabar Audio Desde Matlabsuperchosto_manОценок пока нет
- Anexo 3.3 - Instructivo Manejo Adecuado de Desechos - Lic. Gabriela EspinozaДокумент27 страницAnexo 3.3 - Instructivo Manejo Adecuado de Desechos - Lic. Gabriela EspinozaCarmen RivasОценок пока нет
- Examen Final 1Документ9 страницExamen Final 1Billy CarranzaОценок пока нет
- Proceso Terapeutico Humanista TranspersoДокумент568 страницProceso Terapeutico Humanista Transpersoisabelina0723100% (1)
- Transporte MarítimoДокумент30 страницTransporte MarítimoEngel Quellwasser LariselОценок пока нет
- Informe Pasantia BarivenДокумент90 страницInforme Pasantia BarivenNoel HerreraОценок пока нет
- Manual de Uso Motobomba EvansДокумент8 страницManual de Uso Motobomba EvansJohana PeñaОценок пока нет
- La Generación Del 28Документ2 страницыLa Generación Del 28Anthony JimenezОценок пока нет
- Noviazgo NofiascoДокумент14 страницNoviazgo NofiascoPedro Luis Martinez SanchezОценок пока нет
- Práctica Forense Crua 2022 Módulo 1. ArbitrajeДокумент19 страницPráctica Forense Crua 2022 Módulo 1. ArbitrajeKatheryne VergaraОценок пока нет
- Presentacion Final Proyecto JardinДокумент35 страницPresentacion Final Proyecto JardinZayra LandinОценок пока нет
- TeatroДокумент3 страницыTeatrodaniela floresОценок пока нет
- Diploma de Especializacion Gerencia y Gestion MunicipalДокумент3 страницыDiploma de Especializacion Gerencia y Gestion MunicipalJherson PonceОценок пока нет
- Motricidad Atención MemoriaДокумент15 страницMotricidad Atención MemoriaRuth AzecasОценок пока нет
- Cómo Enfrentar Las Circunstancias AdversasДокумент4 страницыCómo Enfrentar Las Circunstancias AdversasJuan Manuel Veramendi Huam ́ ́anОценок пока нет
- Características de Los EmprendedoresДокумент2 страницыCaracterísticas de Los EmprendedoresAlfredoОценок пока нет
- Lista de Precios de Prevencion de Incendio - CentronicДокумент6 страницLista de Precios de Prevencion de Incendio - CentronictoolsОценок пока нет
- SEPU-MC-04 Calculo de Barra de 10 KVДокумент3 страницыSEPU-MC-04 Calculo de Barra de 10 KVErika Buenalaya CangalayaОценок пока нет
- Guia Rapida TPV 070214Документ9 страницGuia Rapida TPV 070214Juegade10Оценок пока нет
- Ciudadania Principio de Igualdad en La Constitución Del EcuadorДокумент4 страницыCiudadania Principio de Igualdad en La Constitución Del EcuadorMateoTrujilloОценок пока нет