Вам также может понравиться
- Análisis Espacio UrbanoДокумент174 страницыAnálisis Espacio UrbanoSocioestética Espacio Público100% (7)
- Calidad de Vida y Medio Ambiente UrbanoДокумент4 страницыCalidad de Vida y Medio Ambiente UrbanoAlberto Laurente AlfaroОценок пока нет
- Calidad de vida urbana e indicadores de sostenibilidadДокумент33 страницыCalidad de vida urbana e indicadores de sostenibilidadLaura QuirozОценок пока нет
- SemaforosДокумент2 страницыSemaforosAtziry Hernandez MontielОценок пока нет
- Pautas Urbanismo 3A 2018-2 Ultimo AДокумент1 страницаPautas Urbanismo 3A 2018-2 Ultimo AAlberto Laurente AlfaroОценок пока нет
- Ejercicios Compuertas Logicas PDFДокумент26 страницEjercicios Compuertas Logicas PDFAdriana LobatoОценок пока нет
- UNI-INGENIERÍA ELÉCTRICA FALLA 2ØT BARRA BДокумент9 страницUNI-INGENIERÍA ELÉCTRICA FALLA 2ØT BARRA BAaron Huaman TafurОценок пока нет
- Ejercicios Compuertas Logicas PDFДокумент26 страницEjercicios Compuertas Logicas PDFAdriana LobatoОценок пока нет
- Seminario Máquina AsíncronaДокумент3 страницыSeminario Máquina AsíncronaAlberto Laurente AlfaroОценок пока нет
- Maquinas de Indusccion Asincronas Ocw - Captitulo - IIДокумент38 страницMaquinas de Indusccion Asincronas Ocw - Captitulo - IIJm MoОценок пока нет
- Perfil Del Ingeniero en Higiene y SeguridadДокумент4 страницыPerfil Del Ingeniero en Higiene y SeguridadJhonny Picone Briceño100% (2)
- Ejemplo de PortadaДокумент2 страницыEjemplo de PortadaJuan VargasОценок пока нет
- Hoja Tecnica Espaciador PDFДокумент4 страницыHoja Tecnica Espaciador PDFAlanОценок пока нет
- Ensayos de compactación de suelosДокумент18 страницEnsayos de compactación de suelosAnonismosОценок пока нет
- Indeterminacion EstaticaДокумент5 страницIndeterminacion EstaticaHaroldVillanuevaTeran67% (3)
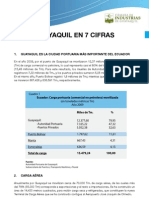
- Guayaquil en CifrasДокумент3 страницыGuayaquil en CifrasKevin HerreraОценок пока нет
- Abrazaderas TuberiasДокумент69 страницAbrazaderas TuberiasDcf EduОценок пока нет
- Evaluación PDFДокумент11 страницEvaluación PDFquequieresqueОценок пока нет
- Informacion Ingles 1 PDFДокумент15 страницInformacion Ingles 1 PDFJose Tomas Vergara DiazОценок пока нет
- Formato de Equipos de Proteccion PersonalДокумент1 страницаFormato de Equipos de Proteccion PersonalDavid Zapata50% (2)
- Matriz EfeДокумент16 страницMatriz EfeDeniz Denilson100% (2)
- Mando HBC Extracto PDFДокумент7 страницMando HBC Extracto PDFAlfredo Dominguez ArandaОценок пока нет
- Contaminacion IonicaДокумент19 страницContaminacion IonicawilmherОценок пока нет
- Historia Del SoftwareДокумент13 страницHistoria Del SoftwareEdisson Santiago Deaza GómezОценок пока нет
- CurpДокумент1 страницаCurpROBERTO GarcíaОценок пока нет
- Por Que Debemos Estudiar La PolíticaДокумент11 страницPor Que Debemos Estudiar La PolíticaJhesus Garcia75% (4)
- El Catalizador de Tres ViasДокумент14 страницEl Catalizador de Tres Viasisrael machicado calleОценок пока нет
- Planos SierraДокумент10 страницPlanos SierraMauricio SanchezОценок пока нет
- Mambocaure - Informe FinalДокумент162 страницыMambocaure - Informe FinalCarlos Abrego Suárez100% (1)
- Guia de Instalacion Ilustrada de Radios Microondas RTN 950 y RTN 605 2 PDFДокумент42 страницыGuia de Instalacion Ilustrada de Radios Microondas RTN 950 y RTN 605 2 PDFAttackDenied123Оценок пока нет
- Preguntas Ex FamáДокумент10 страницPreguntas Ex FamáEnglish Yo AprendoОценок пока нет
- Investigación de EstáticaДокумент10 страницInvestigación de EstáticaVictor Manuel Peña RamírezОценок пока нет
- Formato Nuevo NCRДокумент1 страницаFormato Nuevo NCRramon coss lopezОценок пока нет
- Guia Aprendizaje 2 Bombas LinealesДокумент4 страницыGuia Aprendizaje 2 Bombas Linealeschivo2145Оценок пока нет
- 605 659 PB PDFДокумент359 страниц605 659 PB PDFMaribel Caricari Zurita100% (1)
- Planilla de Ferrocarriles 1 (Autoguardado)Документ77 страницPlanilla de Ferrocarriles 1 (Autoguardado)Robert BanegasОценок пока нет
- Cultivo arroz impacto medioambienteДокумент2 страницыCultivo arroz impacto medioambientedaniel0% (1)
- Informe Practicas PreДокумент16 страницInforme Practicas PreJessica Sanchez100% (1)
- Clasificacion y Especificiones de Las Unidades de AlbañileriaДокумент27 страницClasificacion y Especificiones de Las Unidades de AlbañileriajavierОценок пока нет
- BBD Br010014ce3Документ116 страницBBD Br010014ce3Daniel Alex SánchezОценок пока нет