Вам также может понравиться
- Azimuth Determination of A Line by Observation of The Sun at Equal AltitudeДокумент4 страницыAzimuth Determination of A Line by Observation of The Sun at Equal AltitudemarkyОценок пока нет
- Scale Measurement For Aerial PhotographyДокумент13 страницScale Measurement For Aerial PhotographySushant SawantОценок пока нет
- The Geodetic Datum and The Geodetic Reference SystemsДокумент6 страницThe Geodetic Datum and The Geodetic Reference SystemsKismetОценок пока нет
- Chapter 3 Analysis and Adjustment of ObservationsДокумент67 страницChapter 3 Analysis and Adjustment of ObservationsAbdul AzimОценок пока нет
- 1999 Fundamentals of Remote SensingДокумент225 страниц1999 Fundamentals of Remote SensingMangam RajkumarОценок пока нет
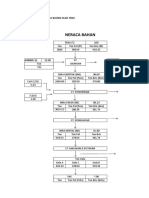
- Neraca BahanДокумент14 страницNeraca BahanAkmal ZuhriОценок пока нет
- PHYSICAL GEODESY - LectureДокумент27 страницPHYSICAL GEODESY - LectureHazelMaeJoseRicoОценок пока нет
- Coordinate System and TraversДокумент25 страницCoordinate System and TraversAhmad Khaled100% (1)
- MINE 170 - Basic Engineering Geology (2021 Session) - TheoryДокумент4 страницыMINE 170 - Basic Engineering Geology (2021 Session) - TheorySyed Intizar MehdiОценок пока нет
- Cartography-Search 2018 PDFДокумент45 страницCartography-Search 2018 PDFArnaldoОценок пока нет
- GE-213 ReviewerДокумент4 страницыGE-213 ReviewerLulu MalotОценок пока нет
- Introduction of Theodolite, Traversing by Theodolite, Error in TraversingДокумент26 страницIntroduction of Theodolite, Traversing by Theodolite, Error in TraversingRaju Sharma81% (27)
- Geodesytriangulation 151125092103 Lva1 App6892 PDFДокумент121 страницаGeodesytriangulation 151125092103 Lva1 App6892 PDFMrunmayee ManjariОценок пока нет
- 04 - Map ProjectionsДокумент17 страниц04 - Map ProjectionsMelisa AyuningtyasОценок пока нет
- Elements of GeodesyДокумент35 страницElements of Geodesyvaggosk100% (2)
- The Geoid and The Height Systems The Geoid and The Height SystemsДокумент5 страницThe Geoid and The Height Systems The Geoid and The Height SystemsKismet100% (1)
- Week 1 - PPT 1 - AMG 211 (Basic Algebraic Operations To Equations and Inequalities)Документ36 страницWeek 1 - PPT 1 - AMG 211 (Basic Algebraic Operations To Equations and Inequalities)not funny didn't laughОценок пока нет
- Chapter 2 - Geodesy and Datums in NavigationДокумент7 страницChapter 2 - Geodesy and Datums in NavigationBashir Kharal100% (1)
- GRS 80 Moritz PDFДокумент35 страницGRS 80 Moritz PDFNadira MgsОценок пока нет
- Terrestrial Reference System and FrameДокумент34 страницыTerrestrial Reference System and FrameArga Fondra OksapingОценок пока нет
- Map ProjectionsДокумент21 страницаMap ProjectionsGeorge100% (1)
- What Is A Coordinate System?Документ6 страницWhat Is A Coordinate System?EMINAT PRINCE100% (1)
- Fundamentals of Remote Sensing-Pages-1-33Документ33 страницыFundamentals of Remote Sensing-Pages-1-33Lia AlzierОценок пока нет
- Photoframmetry SupplementДокумент4 страницыPhotoframmetry SupplementBreeОценок пока нет
- Geoid Heights and Deflection of The VerticalДокумент3 страницыGeoid Heights and Deflection of The VerticalIvan Arnaiz LontocОценок пока нет
- 2 - GeodesyДокумент28 страниц2 - GeodesyReynaldo AldamarОценок пока нет
- Coordinate Systems & Map Projection: Prof. M R Sivaraman 27 December 2018 Second Talk of The Webinar A Course of GeodesyДокумент41 страницаCoordinate Systems & Map Projection: Prof. M R Sivaraman 27 December 2018 Second Talk of The Webinar A Course of GeodesyPrasanna Naik100% (1)
- Purposes/Objective 4. Equipment Used 5. Procedure Works 6. Result (Booking) 7. Analysis/Data Computation 8. ConclusionДокумент9 страницPurposes/Objective 4. Equipment Used 5. Procedure Works 6. Result (Booking) 7. Analysis/Data Computation 8. ConclusionFarisa ZulkifliОценок пока нет
- Basic Concept of GPSДокумент6 страницBasic Concept of GPSnehaaneesОценок пока нет
- Photogrammetry Examplers PDFДокумент11 страницPhotogrammetry Examplers PDFhawcОценок пока нет
- Map Projections IIДокумент139 страницMap Projections IIMeire SchmidtОценок пока нет
- Geodetic Datum 2Документ8 страницGeodetic Datum 2wyath14Оценок пока нет
- I. Introduction To SurveyingДокумент33 страницыI. Introduction To SurveyingKristelle GinezОценок пока нет
- Photogrammetry Ortho Workshop 2007 PDFДокумент51 страницаPhotogrammetry Ortho Workshop 2007 PDFgiobatta9118Оценок пока нет
- Map Projections in ArcGISДокумент53 страницыMap Projections in ArcGISGabriela Fabiana Sosa Claverí100% (1)
- GE 155.1 4C Group 4 LabEx 1Документ18 страницGE 155.1 4C Group 4 LabEx 1Marco ConopioОценок пока нет
- Tutorial Ellipsoid, Geoid, Gravity, Geodesy, and Geophysics - Li - G - TutДокумент10 страницTutorial Ellipsoid, Geoid, Gravity, Geodesy, and Geophysics - Li - G - TutSuta VijayaОценок пока нет
- Environmental Damage Due To Fossil Fuels UseДокумент11 страницEnvironmental Damage Due To Fossil Fuels UseMUHAMMAD LUQMAN IZZUDDIN BIN SUHAIMIОценок пока нет
- Types of Biodiversity PDFДокумент2 страницыTypes of Biodiversity PDFCristianОценок пока нет
- Advanced Surveying 140601Документ2 страницыAdvanced Surveying 140601akashkaswalaОценок пока нет
- TraversingДокумент8 страницTraversingsuwashОценок пока нет
- Gravity AnomaliesДокумент2 страницыGravity AnomaliesYadi Kurniadi100% (1)
- Lec 9 Gravity ReductionДокумент35 страницLec 9 Gravity ReductionJhon JayFord Salanio Esguerra100% (1)
- Physical GeodesyДокумент13 страницPhysical GeodesyJeanelyn TomОценок пока нет
- Presentation 2Документ53 страницыPresentation 2Sherin KollakkodanОценок пока нет
- Coordinate Systems and GeoreferencingДокумент18 страницCoordinate Systems and GeoreferencingStephen DapaahОценок пока нет
- Map Projections and Coordinate SystemДокумент7 страницMap Projections and Coordinate SystemjparamОценок пока нет
- Lecture3 PrinciplesofStereoscopicVisionДокумент87 страницLecture3 PrinciplesofStereoscopicVisionJulca Gonza MelissaОценок пока нет
- Measurement of Angles and DirectionsДокумент21 страницаMeasurement of Angles and DirectionsRon Michael Dave T. CezarОценок пока нет
- Adjust CДокумент133 страницыAdjust CFelipe Carvajal Rodríguez100% (1)
- Photogrammetry - Exam For Land ADMNIДокумент2 страницыPhotogrammetry - Exam For Land ADMNItesfaye100% (1)
- 436 33 Powerpoint Slides CHAPTER 1Документ69 страниц436 33 Powerpoint Slides CHAPTER 1Anonymous PeFQLw19Оценок пока нет
- Relief and Tilt DisplacementДокумент43 страницыRelief and Tilt DisplacementJay AnnОценок пока нет
- CoordinatesДокумент82 страницыCoordinatesSnehalagoo LagooОценок пока нет
- CollectionДокумент5 страницCollectionDyah Ayu IndrasariОценок пока нет
- GeodalДокумент12 страницGeodalStan LeyОценок пока нет
- Geodesy: Jump To Navigationjump To SearchДокумент10 страницGeodesy: Jump To Navigationjump To SearchSaul AchanccarayОценок пока нет
- 5.system of CoordinatesДокумент67 страниц5.system of CoordinatesAnonymous 1yS2qMSen8Оценок пока нет
- Geomatics Module Yaoundé, June 2013 Unit 5 Geodetic Datums An OverviewДокумент25 страницGeomatics Module Yaoundé, June 2013 Unit 5 Geodetic Datums An OverviewmassamicoОценок пока нет
- Lec 1 - Basic Geodesy Up DatedДокумент30 страницLec 1 - Basic Geodesy Up DatedIkhlaq AhmedОценок пока нет
- Datum and Coordinate System: Dr.J.Devaraju Assistant Professor Upes Dehradun IndiaДокумент18 страницDatum and Coordinate System: Dr.J.Devaraju Assistant Professor Upes Dehradun IndiaSrishty ChakrobortyОценок пока нет
- Anglisht, Detyre KursiДокумент10 страницAnglisht, Detyre Kursigretaa avdylajОценок пока нет
- Attachment 7 (Geology Survey Form)Документ11 страницAttachment 7 (Geology Survey Form)Rhea CelzoОценок пока нет
- Enp Refresher Set AДокумент402 страницыEnp Refresher Set ARhea CelzoОценок пока нет
- Bosigon IP-Conduct of FS (TOR)Документ39 страницBosigon IP-Conduct of FS (TOR)Rhea CelzoОценок пока нет
- Generating Potential Irrigable Area Using QGIS SoftwareДокумент75 страницGenerating Potential Irrigable Area Using QGIS SoftwareRhea CelzoОценок пока нет
- 7 - Environment and SocialДокумент4 страницы7 - Environment and SocialRhea CelzoОценок пока нет
- Attachment 5 (Form For Agriculture Survey)Документ11 страницAttachment 5 (Form For Agriculture Survey)Rhea CelzoОценок пока нет
- 2 - General and Engineering Data (GW, SW, Dam Design, Irrigation and Drainage, Project Cost)Документ3 страницы2 - General and Engineering Data (GW, SW, Dam Design, Irrigation and Drainage, Project Cost)Rhea CelzoОценок пока нет
- FOR C'Zar M. Sulaik: National Irrigation AdministrationДокумент10 страницFOR C'Zar M. Sulaik: National Irrigation AdministrationRhea CelzoОценок пока нет
- 4 Land ClassificationДокумент1 страница4 Land ClassificationRhea CelzoОценок пока нет
- Dao1992 13Документ6 страницDao1992 13Rhea CelzoОценок пока нет
- MATOGDON Discharge ComputationДокумент4 страницыMATOGDON Discharge ComputationRhea CelzoОценок пока нет
- EDD.1.I.003 Tourism Economic ZoneДокумент1 страницаEDD.1.I.003 Tourism Economic ZoneRhea CelzoОценок пока нет
- Pre-Survey Notification LetterДокумент8 страницPre-Survey Notification LetterRhea CelzoОценок пока нет
- Region V - Camarines Norte: Dam Name SystemДокумент4 страницыRegion V - Camarines Norte: Dam Name SystemRhea CelzoОценок пока нет
- GLOBEДокумент1 страницаGLOBERhea CelzoОценок пока нет
- Tourism Development Plan of Marabut, Samar: ProposalДокумент16 страницTourism Development Plan of Marabut, Samar: ProposalRhea CelzoОценок пока нет
- General Layout: Brgy. HallДокумент1 страницаGeneral Layout: Brgy. HallRhea CelzoОценок пока нет
- Activity-1 - Celzo, Rhea JoyДокумент2 страницыActivity-1 - Celzo, Rhea JoyRhea CelzoОценок пока нет
- Projecting Land Demand For Sanitary LandfillsДокумент2 страницыProjecting Land Demand For Sanitary LandfillsRhea CelzoОценок пока нет
- African Languages PDFДокумент9 страницAfrican Languages PDFRhea CelzoОценок пока нет
- GE QuizДокумент3 страницыGE QuizRhea CelzoОценок пока нет
- ACADLabДокумент2 страницыACADLabqadiradnan7177Оценок пока нет
- Int. Geodetic Research Projects: - Fully Integrated in Lectures and Thesis of Geomatics (MSC) Study ProgramДокумент1 страницаInt. Geodetic Research Projects: - Fully Integrated in Lectures and Thesis of Geomatics (MSC) Study ProgramRhea CelzoОценок пока нет
- STRATEGIC PLAN 2016-2020: Modernization of The Philippine Geodetic Reference SystemДокумент21 страницаSTRATEGIC PLAN 2016-2020: Modernization of The Philippine Geodetic Reference SystemRhea CelzoОценок пока нет
- Sample of Literature ReviewДокумент2 страницыSample of Literature ReviewRhea CelzoОценок пока нет
- Landownership and Land Reform: Problems of The PhilipplnesДокумент20 страницLandownership and Land Reform: Problems of The PhilipplnesRhea CelzoОценок пока нет
- JobsДокумент4 страницыJobsRhea CelzoОценок пока нет
- Hideclick Here To Show or Hide The Solution: Volume of WaterДокумент31 страницаHideclick Here To Show or Hide The Solution: Volume of WaterRhea CelzoОценок пока нет
- Developmental StagesДокумент3 страницыDevelopmental StagesRhea CelzoОценок пока нет
- Chapter 05Документ26 страницChapter 05Syed Faraz100% (1)
- Measurements Lab Manual, Mechanical Engineering, MG UniversityДокумент29 страницMeasurements Lab Manual, Mechanical Engineering, MG Universitypramodkb_cusat100% (1)
- My Discussion of Ex. 2Документ1 страницаMy Discussion of Ex. 2Said Ahmed AliОценок пока нет
- How To Read A Vernier CaliperДокумент22 страницыHow To Read A Vernier CaliperRodel VerzosaОценок пока нет
- Experiment 1Документ3 страницыExperiment 1ChristineОценок пока нет
- Spcg6e PPT 6 1Документ33 страницыSpcg6e PPT 6 1api-334707195Оценок пока нет
- Chap 7Документ32 страницыChap 7api-3763138100% (3)
- Easurements: Course: Diploma Subject: Applied Science Physics Unit: IДокумент28 страницEasurements: Course: Diploma Subject: Applied Science Physics Unit: Ipankaj baviskarОценок пока нет
- Bearing and Distance Calculation MethodsДокумент6 страницBearing and Distance Calculation MethodsDayat Hidayat HidayatОценок пока нет
- Basic GeodesyДокумент44 страницыBasic Geodesyelectrical_hackОценок пока нет
- Abbott Calibration Point Selection - PRINTED PDFДокумент35 страницAbbott Calibration Point Selection - PRINTED PDFVallik TadОценок пока нет
- Measurement Lesson 2 Mod 2Документ10 страницMeasurement Lesson 2 Mod 2Marvel Felicity Rosell ArmestoОценок пока нет
- Yarmouk University Al-Hijjawi Faculty For Engineering Technology Civil Engineering DepartmentДокумент4 страницыYarmouk University Al-Hijjawi Faculty For Engineering Technology Civil Engineering Departmentmahmoud alawnehОценок пока нет
- Brochure: ELT (English)Документ12 страницBrochure: ELT (English)European Southern ObservatoryОценок пока нет
- Murah !!! Jual Digital Theodolite Topcon DT 205LДокумент1 страницаMurah !!! Jual Digital Theodolite Topcon DT 205LTRANSSURVEYОценок пока нет
- NO ONE 081295958196 Jual Digital Theodolite Topcon Sokkia Nikon RuideДокумент2 страницыNO ONE 081295958196 Jual Digital Theodolite Topcon Sokkia Nikon RuideReseler100% (1)
- Mycbseeguide Test GeneratorДокумент3 страницыMycbseeguide Test GeneratorRAJESH SHARMAОценок пока нет
- Clepsydra - PesquisaДокумент2 страницыClepsydra - PesquisaJose Maria SantosОценок пока нет
- Eure ChemДокумент5 страницEure Chembudi_alamsyahОценок пока нет
- Books About Spectroscopic MethodsДокумент3 страницыBooks About Spectroscopic Methodschem_dream10Оценок пока нет
- 1347 01Документ3 страницы1347 01Anonymous y3tPCbVrОценок пока нет
- Lab 7Документ3 страницыLab 7Ankit PatelОценок пока нет
- SOP 4 Calibration Dwright V19Документ44 страницыSOP 4 Calibration Dwright V19Maruthi KОценок пока нет
- SI UnitsДокумент1 страницаSI UnitsluameiacheiaОценок пока нет
- Measurement Power Point Review 1h2al8a 120321201551 Phpapp01Документ21 страницаMeasurement Power Point Review 1h2al8a 120321201551 Phpapp01Mary Grace YañezОценок пока нет
- Self Balancing RobotДокумент10 страницSelf Balancing RobotVasu RockstarОценок пока нет
- Placidius - House - System - CalculationHermetic Astrology, Articles, Astrologer DSB AquilaДокумент24 страницыPlacidius - House - System - CalculationHermetic Astrology, Articles, Astrologer DSB AquilaRavan SharmaОценок пока нет
- Micro RulerДокумент2 страницыMicro RulerFawwaz KhayyatОценок пока нет