Вам также может понравиться
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5795)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- CMZ700 Yokogawa GyroДокумент84 страницыCMZ700 Yokogawa GyroAdi Prasetyo89% (9)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- JUE-85 SSAS Option Operation Manual 7ZPSC0201Документ48 страницJUE-85 SSAS Option Operation Manual 7ZPSC0201Adi Prasetyo40% (5)
- Tesla Model X Full Collection 2015 2019 Service Repair Manuals Part Catalog DVDДокумент25 страницTesla Model X Full Collection 2015 2019 Service Repair Manuals Part Catalog DVDbrendamcguire120300mjg100% (115)
- JAN-701B, 901B Installation ManualДокумент140 страницJAN-701B, 901B Installation ManualAdi Prasetyo100% (2)
- DBS11011-12 - Operator Manual DM100 Danelec MarineДокумент27 страницDBS11011-12 - Operator Manual DM100 Danelec MarineAdi PrasetyoОценок пока нет
- Maris Navico Manuals ECDIS900 Users Guide Rel LДокумент309 страницMaris Navico Manuals ECDIS900 Users Guide Rel LAdi PrasetyoОценок пока нет
- Iso 3834 3 2021Документ10 страницIso 3834 3 2021Dulce Tlanilli Dionisio AmadoОценок пока нет
- Parallel Port Interfacing Using Assembly LanguageДокумент21 страницаParallel Port Interfacing Using Assembly Languageamon_abilar100% (1)
- PS Unit Replacement Procedures JSS296Документ10 страницPS Unit Replacement Procedures JSS296Adi PrasetyoОценок пока нет
- User Manual-Hardware Danelec ECDIS DM800 PDFДокумент20 страницUser Manual-Hardware Danelec ECDIS DM800 PDFAdi PrasetyoОценок пока нет
- NFC-296 Antenna EarthДокумент1 страницаNFC-296 Antenna EarthAdi PrasetyoОценок пока нет
- ADE Improvement ProcedureДокумент49 страницADE Improvement ProcedureAdi PrasetyoОценок пока нет
- TT98-120343-G TT3000SSA Installation ManualДокумент31 страницаTT98-120343-G TT3000SSA Installation ManualAdi PrasetyoОценок пока нет
- DM-D100 Inst Oper Manual DL850 Dolog 2X Replacement PDFДокумент12 страницDM-D100 Inst Oper Manual DL850 Dolog 2X Replacement PDFAdi PrasetyoОценок пока нет
- User's Manual: D/S Repeater Converter MKC106AДокумент18 страницUser's Manual: D/S Repeater Converter MKC106AAdi PrasetyoОценок пока нет
- DBS00328-31A - Operators Manual DM200-DM500 PDFДокумент42 страницыDBS00328-31A - Operators Manual DM200-DM500 PDFAdi PrasetyoОценок пока нет
- DM-M006-1424 DL21 Installation ManualДокумент24 страницыDM-M006-1424 DL21 Installation ManualAdi PrasetyoОценок пока нет
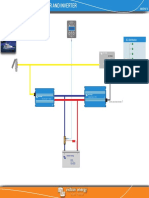
- Blue Power Charger and InverterДокумент1 страницаBlue Power Charger and InverterAdi PrasetyoОценок пока нет
- Operator Manual: EnglishДокумент68 страницOperator Manual: EnglishAdi PrasetyoОценок пока нет
- GDS102 Operation and Installalion Manual 1.12.10Документ75 страницGDS102 Operation and Installalion Manual 1.12.10Adi PrasetyoОценок пока нет
- Im Mkc106a e 1stДокумент18 страницIm Mkc106a e 1stAdi PrasetyoОценок пока нет
- JLN-550 Instruction ManualДокумент48 страницJLN-550 Instruction ManualAdi Prasetyo100% (1)
- SM MHR112-E 1stДокумент9 страницSM MHR112-E 1stAdi PrasetyoОценок пока нет
- Dm-m003-Sa 1430 Cu-M001 Dl2 User ManualДокумент36 страницDm-m003-Sa 1430 Cu-M001 Dl2 User ManualAdi PrasetyoОценок пока нет
- CSS XBand and OTHR RadarsДокумент2 страницыCSS XBand and OTHR RadarsAdi PrasetyoОценок пока нет
- Samyung Radio STR-580DДокумент53 страницыSamyung Radio STR-580DAdi Prasetyo100% (1)
- MSDS PSU BatteriesДокумент7 страницMSDS PSU BatteriesAdi PrasetyoОценок пока нет
- Operator Manual: EnglishДокумент48 страницOperator Manual: EnglishAdi PrasetyoОценок пока нет
- Ydk Emlog Eml500Документ13 страницYdk Emlog Eml500Adi PrasetyoОценок пока нет
- Samyung Brochure srg-1150dДокумент2 страницыSamyung Brochure srg-1150dAdi Prasetyo100% (1)
- DM-D100 Inst Oper Manual DL850 Dolog 2X ReplacementДокумент12 страницDM-D100 Inst Oper Manual DL850 Dolog 2X ReplacementAdi PrasetyoОценок пока нет
- Firmware Upgrade Guide enДокумент4 страницыFirmware Upgrade Guide enPau CorellaОценок пока нет
- U6csa18 Data Communication and Computer Networksl T P c3 0 0 3Документ2 страницыU6csa18 Data Communication and Computer Networksl T P c3 0 0 3Vinoth KumarОценок пока нет
- MGT1021 Digital and Social Media MarketingДокумент29 страницMGT1021 Digital and Social Media MarketingAminaОценок пока нет
- Four Quadrant DC Motor Control Without MicrocontrollerДокумент7 страницFour Quadrant DC Motor Control Without MicrocontrollerNikhil Kumar Agrawal86% (7)
- Ethics and RoboticsДокумент13 страницEthics and Roboticspobeda8Оценок пока нет
- FPR de Weck Jul 1 2012Документ59 страницFPR de Weck Jul 1 2012rmОценок пока нет
- LogДокумент548 страницLogRegine CalipayОценок пока нет
- Baggage X RayДокумент4 страницыBaggage X RayShaaban HassanОценок пока нет
- Government Approved Workshop Gazette NotificationДокумент9 страницGovernment Approved Workshop Gazette NotificationadheesОценок пока нет
- A Brief History of SpreadsheetsДокумент5 страницA Brief History of SpreadsheetsDexter CastilloОценок пока нет
- FPSO Swivel Load MonitoringДокумент1 страницаFPSO Swivel Load MonitoringKim OanhОценок пока нет
- SAP CloudДокумент512 страницSAP CloudyabbaОценок пока нет
- Force 10 BBQДокумент12 страницForce 10 BBQTom KakanowskiОценок пока нет
- Darshan TradingДокумент61 страницаDarshan TradingShobha SinghОценок пока нет
- Sammuel Augusto Gomes MachadoДокумент2 страницыSammuel Augusto Gomes MachadoSam MachadoОценок пока нет
- Key Responsibility AreasДокумент6 страницKey Responsibility AreasSubodh YadavОценок пока нет
- Lab ManualДокумент10 страницLab ManualtheОценок пока нет
- Iso 10245-2-2014 PDFДокумент16 страницIso 10245-2-2014 PDFalejandroОценок пока нет
- Chapter 3Документ74 страницыChapter 3Berhane KifleОценок пока нет
- 6WG1 TanıtımДокумент17 страниц6WG1 TanıtımHalil KaraОценок пока нет
- Andrew Bonar LeviticusДокумент517 страницAndrew Bonar LeviticusexpsalmodyОценок пока нет
- Mini210s Manual 20120531Документ233 страницыMini210s Manual 20120531cor01Оценок пока нет
- Base Industrial Engine EFI: 1.6-Litre 4-CylinderДокумент2 страницыBase Industrial Engine EFI: 1.6-Litre 4-CylinderTaimoor AhmedОценок пока нет
- DC Inverter Multi-System Air ConditionerДокумент122 страницыDC Inverter Multi-System Air ConditionerSergio ReyesОценок пока нет
- Bangalore It Companies Directory PDFДокумент168 страницBangalore It Companies Directory PDFdeepakraj2005Оценок пока нет
- Integrating Microsoft Access With Autocad VbaДокумент19 страницIntegrating Microsoft Access With Autocad VbaLuiz Paulo Cruz JrОценок пока нет
- AaiPe NeoBankingДокумент17 страницAaiPe NeoBankingPuneet SethiОценок пока нет