Вам также может понравиться
- Utilizar El Contenido Del Vídeo TOGAF El Framework para El Desarrollo de Buenas Prácticas Como SOAДокумент1 страницаUtilizar El Contenido Del Vídeo TOGAF El Framework para El Desarrollo de Buenas Prácticas Como SOAAngelo NaranjoОценок пока нет
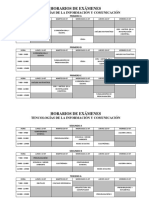
- Horarios Examenes 2HДокумент6 страницHorarios Examenes 2HAngelo NaranjoОценок пока нет
- Preguntas Gestión de SoftwareДокумент11 страницPreguntas Gestión de SoftwareAngelo NaranjoОценок пока нет
- Formulación de PreguntasДокумент1 страницаFormulación de PreguntasAngelo NaranjoОценок пока нет
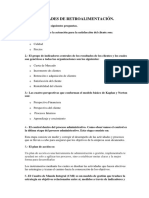
- PreguntasДокумент2 страницыPreguntasAngelo NaranjoОценок пока нет
- GUIA de PLANIFICACIÓN ESTRATÉGICA. 2021Документ87 страницGUIA de PLANIFICACIÓN ESTRATÉGICA. 2021Angelo NaranjoОценок пока нет
- DSDSADSADSADДокумент79 страницDSDSADSADSADcarlosОценок пока нет
- Tarea #4Документ17 страницTarea #4Angelo NaranjoОценок пока нет
- Preguntas Gestión de SoftwareДокумент11 страницPreguntas Gestión de SoftwareAngelo NaranjoОценок пока нет
- ProyectoДокумент16 страницProyectoAngelo NaranjoОценок пока нет
- Planificación Estratégica. 2021Документ20 страницPlanificación Estratégica. 2021Angelo NaranjoОценок пока нет
- TemaДокумент13 страницTemaJhOjanziitho Thu LoveОценок пока нет
- Gestión de Riesgo Del Software Agendamiento de CitasДокумент19 страницGestión de Riesgo Del Software Agendamiento de CitasAngelo NaranjoОценок пока нет
- Intriago ExamenДокумент7 страницIntriago ExamenAngelo NaranjoОценок пока нет
- ProyectoДокумент17 страницProyectoAngelo NaranjoОценок пока нет
- Arquitectura TecnologicaДокумент8 страницArquitectura TecnologicaAngelo NaranjoОценок пока нет
- Arquitectura TecnologicaДокумент8 страницArquitectura TecnologicaAngelo NaranjoОценок пока нет
- Crucigrama: NameДокумент2 страницыCrucigrama: NameAngelo NaranjoОценок пока нет
- Planificación Estratégica. 2021Документ20 страницPlanificación Estratégica. 2021Angelo NaranjoОценок пока нет
- Formulación de PreguntasДокумент1 страницаFormulación de PreguntasAngelo NaranjoОценок пока нет
- Horarios Examenes 2HДокумент6 страницHorarios Examenes 2HAngelo NaranjoОценок пока нет
- Utilizar El Contenido Del Vídeo TOGAF El Framework para El Desarrollo de Buenas Prácticas Como SOAДокумент1 страницаUtilizar El Contenido Del Vídeo TOGAF El Framework para El Desarrollo de Buenas Prácticas Como SOAAngelo NaranjoОценок пока нет
- Crucigrama: NameДокумент2 страницыCrucigrama: NameAngelo NaranjoОценок пока нет
- TAREA2Документ2 страницыTAREA2Angelo NaranjoОценок пока нет
- 05 Plan de Desarrollo SoftwareДокумент12 страниц05 Plan de Desarrollo SoftwareGabrielaMaribelОценок пока нет
- Universidad Técnica Luis Vargas Torres de EsmeraldasДокумент6 страницUniversidad Técnica Luis Vargas Torres de EsmeraldasAngelo NaranjoОценок пока нет
- Ubicación de Un Centro de Cómputo A Nivel Del Resto de Departamentos, Con Funciones Más ComplejasДокумент1 страницаUbicación de Un Centro de Cómputo A Nivel Del Resto de Departamentos, Con Funciones Más ComplejasAngelo NaranjoОценок пока нет
- Metodologías de Análisis de RiesgosДокумент5 страницMetodologías de Análisis de RiesgosAngelo NaranjoОценок пока нет
- Ubicación de Un Centro de Cómputo Tipo Departamental en Una Empresa PequeñaДокумент3 страницыUbicación de Un Centro de Cómputo Tipo Departamental en Una Empresa PequeñaAngelo NaranjoОценок пока нет
- Ingenieria de Software RiesgosДокумент6 страницIngenieria de Software RiesgosEl MágicoОценок пока нет
- T P #1 2021 (Lsi - Pi)Документ11 страницT P #1 2021 (Lsi - Pi)ivanlalvarez.22Оценок пока нет
- Tema 13Документ12 страницTema 13Totti Di Franchesco PelaezОценок пока нет
- Entregable 1 Calculo DiferencialДокумент7 страницEntregable 1 Calculo DiferencialPuchuОценок пока нет
- Problemas A Resolver 2020Документ5 страницProblemas A Resolver 2020Yadira YQ100% (1)
- Cuadernillo-20220924 192401FJ0gДокумент3 страницыCuadernillo-20220924 192401FJ0gJose M. C.0% (1)
- Resumen Octavo SemanalДокумент8 страницResumen Octavo SemanalFernando GamboaОценок пока нет
- ProtocoloДокумент141 страницаProtocoloAnderzon Quito GonzalesОценок пока нет
- Division de PolinomiosДокумент5 страницDivision de PolinomiosLisseth Mahecha Diaz SantamariaОценок пока нет
- Unidad 2 Proporcionalidad Problemas Finacieros 4 EsoДокумент16 страницUnidad 2 Proporcionalidad Problemas Finacieros 4 EsoAriana Suárez BetancourtОценок пока нет
- Ejercicios: Calcular El Área de Un Cuadriláteros (Cuadrado, Rectángulo, Rombo, Romboide, Trapecio)Документ4 страницыEjercicios: Calcular El Área de Un Cuadriláteros (Cuadrado, Rectángulo, Rombo, Romboide, Trapecio)elheco76Оценок пока нет
- 131 Matemática 1Документ4 страницы131 Matemática 1Jennyfer PacsiОценок пока нет
- EVALUACION Matematica Unidad 1Документ5 страницEVALUACION Matematica Unidad 1clauditaaguiОценок пока нет
- Evaluacion Fracciones AlgebraicasДокумент2 страницыEvaluacion Fracciones AlgebraicasKarina Landeros CaucamanОценок пока нет
- Guía 10° Funciones y DesfasesДокумент13 страницGuía 10° Funciones y DesfasesmaribelnaОценок пока нет
- Ejercicios Programacion OnceДокумент13 страницEjercicios Programacion OnceAngel GomezОценок пока нет
- 8 - Solucionario Angulos y Proporcionalidad en La CircunferenciaДокумент13 страниц8 - Solucionario Angulos y Proporcionalidad en La CircunferenciaBernardita CaceresОценок пока нет
- Ficha de Identificación de Trabajo de Investigación: Gabriela Roca Aruquipa 47299 15/07/2019Документ11 страницFicha de Identificación de Trabajo de Investigación: Gabriela Roca Aruquipa 47299 15/07/2019Rs Chete MiguelОценок пока нет
- P3.2.-Diédrico IIДокумент1 страницаP3.2.-Diédrico IICristianОценок пока нет
- Tema 4Документ7 страницTema 4Roberto GuevaraОценок пока нет
- Sem 4 DerivadasДокумент39 страницSem 4 DerivadasCés Avi CelОценок пока нет
- 1 - Arit - 5° PRE - Cap15 - 2021Документ5 страниц1 - Arit - 5° PRE - Cap15 - 2021Abel CarpioОценок пока нет
- Compendio Ciencias - 4 - 5 - 6Документ94 страницыCompendio Ciencias - 4 - 5 - 6Manuel M. ColosОценок пока нет
- Factorizacion Segundo ImprimirДокумент2 страницыFactorizacion Segundo ImprimirRudy MaldonadoОценок пока нет
- Areas SombreadasДокумент3 страницыAreas Sombreadasjosefer1305Оценок пока нет
- La Línea Recta Autor Alfredo Camacho Valle PH.DДокумент13 страницLa Línea Recta Autor Alfredo Camacho Valle PH.Dalfredo martinezОценок пока нет
- Ecuacion de La RectaДокумент20 страницEcuacion de La RectaCarmen AusayОценок пока нет
- 2-Ejercitación RacionalesДокумент14 страниц2-Ejercitación RacionaleshuevitobassОценок пока нет
- Figuras PlanasДокумент20 страницFiguras PlanasDiego Ricardo Rojas CuellarОценок пока нет
- Matematica SecundariaДокумент15 страницMatematica SecundariaEmmanuel Jimenez RodriguezОценок пока нет
- Ecuaciones Inecuaciones ResumenДокумент3 страницыEcuaciones Inecuaciones ResumenCharo CaviaОценок пока нет