Вам также может понравиться
- Electrical and Electronics Measurements and Instrumentation by Prithwiraj Purkait PDFДокумент651 страницаElectrical and Electronics Measurements and Instrumentation by Prithwiraj Purkait PDFA Rajesh Kumar67% (3)
- Chapter 2 Problem Solutions: EC ECДокумент3 страницыChapter 2 Problem Solutions: EC ECPetar JuricОценок пока нет
- Agoshkov, Dubovski & Shutyaev - Methods For Solving Mathematical Physics ProblemsДокумент335 страницAgoshkov, Dubovski & Shutyaev - Methods For Solving Mathematical Physics ProblemsThilina Senaviratne100% (1)
- Plane Waves Propagations in An Arbitrary Direction: EE2060 Engineering ElectromagneticДокумент9 страницPlane Waves Propagations in An Arbitrary Direction: EE2060 Engineering ElectromagneticAsdcxzОценок пока нет
- April Huei-Min Lu - The Compass and The Ruler - Theory and Practice in Taiwanese Geomancy. Ph.D. Dissertation (1997) PDFДокумент209 страницApril Huei-Min Lu - The Compass and The Ruler - Theory and Practice in Taiwanese Geomancy. Ph.D. Dissertation (1997) PDFguido360Оценок пока нет
- Hydrostatic Test Pressure CalculationДокумент1 страницаHydrostatic Test Pressure Calculationmarclkm93% (15)
- Functional Analysis Theory and Applications R E EdwardsДокумент795 страницFunctional Analysis Theory and Applications R E EdwardsIng Emerson80% (5)
- Understanding Gravity Gradients PDFДокумент10 страницUnderstanding Gravity Gradients PDFDian RizqaОценок пока нет
- Replica Metallography and Penetrant TestingДокумент14 страницReplica Metallography and Penetrant TestingBala Singam100% (1)
- Innovative Push Launching Technique For Long Span BridgeДокумент8 страницInnovative Push Launching Technique For Long Span BridgeAnkit GuptaОценок пока нет
- Proc. London Math. Soc. 1915 Jeffery 327 38Документ12 страницProc. London Math. Soc. 1915 Jeffery 327 38Archit DaniОценок пока нет
- Chapter - Furnaces and RefractoriesДокумент36 страницChapter - Furnaces and Refractorieshasan_waqar2004Оценок пока нет
- H.K. Moffatt, Y. Shimomura and M. Branicki - Dynamics of An Axisymmetric Body Spinning On A Horizontal Surface. I. Stability and The Gyroscopic ApproximationДокумент30 страницH.K. Moffatt, Y. Shimomura and M. Branicki - Dynamics of An Axisymmetric Body Spinning On A Horizontal Surface. I. Stability and The Gyroscopic ApproximationVortices3443Оценок пока нет
- Virtual WorkДокумент8 страницVirtual WorkMahfuzur Rahman SadiОценок пока нет
- Foucult PendulumДокумент7 страницFoucult PendulumkanchankonwarОценок пока нет
- Lecture # 12 - 13, Equations of Motion (Cylindrical Coordinates)Документ20 страницLecture # 12 - 13, Equations of Motion (Cylindrical Coordinates)Khair Bux MazariОценок пока нет
- 10 1103@PhysRevLett 120 201103Документ5 страниц10 1103@PhysRevLett 120 201103rakic_dejanОценок пока нет
- Feynman, Fermi InteractionДокумент6 страницFeynman, Fermi InteractionpablotechnobarОценок пока нет
- Optics by Ajoy Ghatak Chepter 7Документ16 страницOptics by Ajoy Ghatak Chepter 7Sumit GuptaОценок пока нет
- Lecture 05Документ39 страницLecture 05Ruthvik PОценок пока нет
- Arjuna For Physics Class-XI - Module-3Документ77 страницArjuna For Physics Class-XI - Module-3kunal guptaОценок пока нет
- (SPENCER, E., G&techniqueДокумент3 страницы(SPENCER, E., G&techniqueMatija LozicОценок пока нет
- AstronomyДокумент58 страницAstronomyhariharanphysics02Оценок пока нет
- Geofisical Fluid Dinam 1d1Документ5 страницGeofisical Fluid Dinam 1d1koalagrisОценок пока нет
- Physics Ebook - Class 11 - Part 2Документ209 страницPhysics Ebook - Class 11 - Part 2Haltz t00nОценок пока нет
- Rotation of PlateДокумент4 страницыRotation of PlateLucas Araujo de AlmeidaОценок пока нет
- Double Well PotentialДокумент6 страницDouble Well PotentialBosonUpОценок пока нет
- EinsteinPauliYukawa Paradox What Is The Physical RealityДокумент10 страницEinsteinPauliYukawa Paradox What Is The Physical RealityahsbonОценок пока нет
- Moffatt2000 PDFДокумент2 страницыMoffatt2000 PDFEvelyn AlexОценок пока нет
- Dbie3: Lntroducing Moments of ForcesДокумент7 страницDbie3: Lntroducing Moments of ForcesMark Jake RodriguezОценок пока нет
- Digitalcommons@University of Nebraska - Lincoln Digitalcommons@University of Nebraska - LincolnДокумент21 страницаDigitalcommons@University of Nebraska - Lincoln Digitalcommons@University of Nebraska - LincolnFelipePacuanBagasbas-CafeIIIОценок пока нет
- Tutorial 06Документ1 страницаTutorial 06Supriyo Dutta100% (1)
- The Principle of EquivalenceДокумент23 страницыThe Principle of EquivalenceAnonymous 8buGHsОценок пока нет
- Gyroscopic Forces and Torques: Plane of SpinningДокумент4 страницыGyroscopic Forces and Torques: Plane of SpinningPrabhu GОценок пока нет
- Pseudo Forces in Uniformly Rotating FrameДокумент21 страницаPseudo Forces in Uniformly Rotating FramePuspalata DashОценок пока нет
- Omoclinic Orbits and Chaotic Behavior in Lassical EchanicsДокумент21 страницаOmoclinic Orbits and Chaotic Behavior in Lassical EchanicsDAVID ROSAS VARAОценок пока нет
- Vibrationsof A Spinning DiskДокумент9 страницVibrationsof A Spinning DisknbaddourОценок пока нет
- The Hyper-Stereographic Projection of The Four-Dimensional Hyper-SphereДокумент6 страницThe Hyper-Stereographic Projection of The Four-Dimensional Hyper-Spherenoon moonОценок пока нет
- flightDynamicsFullVersion PDFДокумент51 страницаflightDynamicsFullVersion PDFKarthikeya SrivathsavОценок пока нет
- A Classical Potential: L. WaterhouseДокумент24 страницыA Classical Potential: L. Waterhousemdp anonОценок пока нет
- Rotating Frames: 4.1 Angular VelocityДокумент14 страницRotating Frames: 4.1 Angular VelocitymaxОценок пока нет
- Lampiran Laprak Bandul MatematisДокумент24 страницыLampiran Laprak Bandul MatematisVadia Tania AlfarenzaОценок пока нет
- The Added Mass Coefficient Computation of Sphere, Ellipsoid and Marine Propellers Using Boundary Element MethodДокумент10 страницThe Added Mass Coefficient Computation of Sphere, Ellipsoid and Marine Propellers Using Boundary Element MethodsantoshОценок пока нет
- Chapter 6: Solution Algorithms For Pressure-Velocity Coupling in Steady FlowsДокумент13 страницChapter 6: Solution Algorithms For Pressure-Velocity Coupling in Steady FlowsDogus HurdoganogluОценок пока нет
- Planetary Boundary Layer (Continued) : Low Level Jet (LLJ)Документ7 страницPlanetary Boundary Layer (Continued) : Low Level Jet (LLJ)Milannet MilannetОценок пока нет
- Powder Technology, 9: EisevierДокумент9 страницPowder Technology, 9: EisevierRodolfo Morales GálvezОценок пока нет
- Chapter 11Документ38 страницChapter 11NikhilSaxenaОценок пока нет
- Basic Results On Sheaves and Analytic SetsДокумент25 страницBasic Results On Sheaves and Analytic SetsJHJKDОценок пока нет
- Motion of The Tippe Top Gyroscopic Balance Condition and StabilityДокумент52 страницыMotion of The Tippe Top Gyroscopic Balance Condition and StabilityJarek PlaszczycaОценок пока нет
- Introduction PDFДокумент4 страницыIntroduction PDFKarthikeya SrivathsavОценок пока нет
- Rotating Saddle Trap: A Coriolis Force in An Inertial Frame: 1 Introduction and BackgroundДокумент17 страницRotating Saddle Trap: A Coriolis Force in An Inertial Frame: 1 Introduction and BackgroundFishboneОценок пока нет
- (Apuntes) SpinorsДокумент33 страницы(Apuntes) SpinorsRitzo WaОценок пока нет
- Electromag in Non Linear MediaДокумент2 страницыElectromag in Non Linear MediajedusableОценок пока нет
- Ge 109 Final Exam CoverageДокумент58 страницGe 109 Final Exam CoverageHannah Mae GomezОценок пока нет
- Wave Propagation (EMF)Документ42 страницыWave Propagation (EMF)Priyanshu ShekharОценок пока нет
- Lecture 1 Modern Physics For StudentsДокумент26 страницLecture 1 Modern Physics For StudentsMehedi Hasan FoysalОценок пока нет
- Bodies: Vibrations of AnisotropicДокумент11 страницBodies: Vibrations of AnisotropicTung ManhОценок пока нет
- Timoshenko 2Документ1 страницаTimoshenko 2addeОценок пока нет
- Space Time: 119, Hyperbolic Motion in CurvedДокумент8 страницSpace Time: 119, Hyperbolic Motion in CurvedGia-yangKaoОценок пока нет
- Fykos Ii.5: Incompressible Inviscid Fluid in Homog Grav. Field - Steady StateДокумент1 страницаFykos Ii.5: Incompressible Inviscid Fluid in Homog Grav. Field - Steady StatevosmeraОценок пока нет
- Euler DiskДокумент7 страницEuler DiskNehal RishiОценок пока нет
- BerryДокумент13 страницBerryGergely TamásОценок пока нет
- General Motion of A Rigid Body, Motion of A Billiard Ball - GriffithДокумент7 страницGeneral Motion of A Rigid Body, Motion of A Billiard Ball - Griffithluis199555Оценок пока нет
- Space-Time Structure, Newton's Laws and Galilean TransformationДокумент18 страницSpace-Time Structure, Newton's Laws and Galilean TransformationabhijeetОценок пока нет
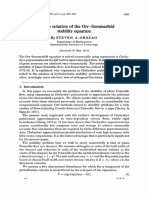
- Orszag 1971 PDFДокумент15 страницOrszag 1971 PDFmrjanusОценок пока нет
- Cosmology in (2 + 1) -Dimensions, Cyclic Models, and Deformations of M2,1. (AM-121), Volume 121От EverandCosmology in (2 + 1) -Dimensions, Cyclic Models, and Deformations of M2,1. (AM-121), Volume 121Оценок пока нет
- Discrete Series of GLn Over a Finite Field. (AM-81), Volume 81От EverandDiscrete Series of GLn Over a Finite Field. (AM-81), Volume 81Оценок пока нет
- Manual SalinasДокумент90 страницManual SalinasRenan AlvesОценок пока нет
- Measurement of Impulsive Thrust From A Closed Radio-Frequency Cavity in VacuumДокумент12 страницMeasurement of Impulsive Thrust From A Closed Radio-Frequency Cavity in Vacuumnost586Оценок пока нет
- Circuit Symmetry PDFДокумент14 страницCircuit Symmetry PDFMakilosaОценок пока нет
- CajoriДокумент86 страницCajoriMichael SchreiberОценок пока нет
- Jon Louis Bentley - More Programming Pearls - Confessions of A Coder (1988)Документ204 страницыJon Louis Bentley - More Programming Pearls - Confessions of A Coder (1988)guido360Оценок пока нет
- The Washington Conclave For Democracy PDFДокумент5 страницThe Washington Conclave For Democracy PDFguido360Оценок пока нет
- Infinite Resistor Chain PDFДокумент5 страницInfinite Resistor Chain PDFguido360Оценок пока нет
- Alexei I. Kostrikin, Yu I Manin Linear Algebra and Geometry Algebra, Logic and Applications 1989Документ322 страницыAlexei I. Kostrikin, Yu I Manin Linear Algebra and Geometry Algebra, Logic and Applications 1989gohan48Оценок пока нет
- Infinite Resistor Chain PDFДокумент5 страницInfinite Resistor Chain PDFguido360Оценок пока нет
- 1967BelzerToolsCatalog No 103Документ34 страницы1967BelzerToolsCatalog No 103guido360Оценок пока нет
- Six Editions of The Modern Researcher, 1957-2003: Oliver B. PollakДокумент3 страницыSix Editions of The Modern Researcher, 1957-2003: Oliver B. PollakMZSHBОценок пока нет
- , x, - . -, x f (x, x, - . -, x, x, - . -, x, x, - . -, x, x, - . -, x, x, - . -, x, σ, - . -, σ ∈Документ5 страниц, x, - . -, x f (x, x, - . -, x, x, - . -, x, x, - . -, x, x, - . -, x, x, - . -, x, σ, - . -, σ ∈guido360Оценок пока нет
- April Huei-Min Lu - The Compass and The Ruler - Theory and Practice in Taiwanese Geomancy. Ph.D. Dissertation (1997) PDFДокумент209 страницApril Huei-Min Lu - The Compass and The Ruler - Theory and Practice in Taiwanese Geomancy. Ph.D. Dissertation (1997) PDFguido360Оценок пока нет
- 1YH Service InformationДокумент84 страницы1YH Service Informationguido360Оценок пока нет
- Czechoslovak and Soviet State Security Against The West Before 1968Документ5 страницCzechoslovak and Soviet State Security Against The West Before 1968dorinkarakogluОценок пока нет
- 1967BelzerToolsCatalog No 103Документ34 страницы1967BelzerToolsCatalog No 103guido360Оценок пока нет
- Symmetry EquationsДокумент3 страницыSymmetry Equationschenhui_ccicОценок пока нет
- Virtua Striker 2Документ44 страницыVirtua Striker 2guido360Оценок пока нет
- Aiats Aieee 2012 Test-1 SolutionДокумент10 страницAiats Aieee 2012 Test-1 Solutionblue_l1Оценок пока нет
- Lecture 3 Geometric Optics PDFДокумент36 страницLecture 3 Geometric Optics PDFPuja KasmailenОценок пока нет
- Publ 5429Документ2 страницыPubl 5429MahmoudОценок пока нет
- CCW - Cooling Water Treatment ProgramsДокумент43 страницыCCW - Cooling Water Treatment Programszerocool86Оценок пока нет
- A Slurry Consolidation Approach To Reconstitute Low-Plasticity Silt Specimens For Laboratory Triaxial TestingДокумент9 страницA Slurry Consolidation Approach To Reconstitute Low-Plasticity Silt Specimens For Laboratory Triaxial TestingFrancyОценок пока нет
- Jayden Almeida - Investigating Projectile Motion Lab Marble LauncherДокумент2 страницыJayden Almeida - Investigating Projectile Motion Lab Marble Launcherapi-537729628Оценок пока нет
- CMAA MovementДокумент9 страницCMAA MovementalbertoxinaОценок пока нет
- Welding Engineering Prof. Dr. D. K. Dwivedi Department of Mechanical and Industrial Engineering Indian Institute of Technology, Roorkee Module - 4 Arc Welding Processes Lecture - 7 GmawДокумент34 страницыWelding Engineering Prof. Dr. D. K. Dwivedi Department of Mechanical and Industrial Engineering Indian Institute of Technology, Roorkee Module - 4 Arc Welding Processes Lecture - 7 GmawFlyNarutoFly27Оценок пока нет
- 019 022 EyvazovДокумент4 страницы019 022 EyvazovCeyhun MahmudovОценок пока нет
- Cement Aggregate Test FrequencyДокумент2 страницыCement Aggregate Test Frequencycarol santosОценок пока нет
- Engine Lubrication & Cooling Systems: SectionДокумент5 страницEngine Lubrication & Cooling Systems: SectionGastonОценок пока нет
- ARCH 162: Statics and Strength of MaterialsДокумент35 страницARCH 162: Statics and Strength of MaterialsFurkan AktaşОценок пока нет
- The Parallel Plate Capacitor - Construction, Principle, Videos and ExamplesДокумент5 страницThe Parallel Plate Capacitor - Construction, Principle, Videos and ExamplesBharat BhushanОценок пока нет
- Fiber OpticsДокумент10 страницFiber OpticsVishal Kumar ShawОценок пока нет
- Hydrogen Fuel Cells AbstractДокумент3 страницыHydrogen Fuel Cells AbstractAKОценок пока нет
- Colorado School of Mines CHEN403 Stirred Tank Heater Developing Transfer Functions From Heat & Material BalancesДокумент8 страницColorado School of Mines CHEN403 Stirred Tank Heater Developing Transfer Functions From Heat & Material BalancesSatria WijayaОценок пока нет
- Over Voltage ProtectionДокумент8 страницOver Voltage ProtectionPKОценок пока нет
- MECHANICAL CONCEPTS TestДокумент19 страницMECHANICAL CONCEPTS TestBob DehnkeОценок пока нет
- Chapter 7. Catalytic ReactionsДокумент33 страницыChapter 7. Catalytic ReactionsAbhinav AnandОценок пока нет
- Edexcel GCE: Chemistry (Nuffield)Документ16 страницEdexcel GCE: Chemistry (Nuffield)Danny AdonisОценок пока нет
- NF FilmTec LiNE XD PDS 45 D04532 enДокумент3 страницыNF FilmTec LiNE XD PDS 45 D04532 enHuynh le ManОценок пока нет
- Radiography IntroductionДокумент35 страницRadiography IntroductionpanikhilОценок пока нет
- Automotive SteelsДокумент12 страницAutomotive SteelspratyaygeminiОценок пока нет
- CBR Test Results ExplainedДокумент3 страницыCBR Test Results ExplainedLudwig McwillsОценок пока нет
- Worksheet Phy 11Документ10 страницWorksheet Phy 11kcricketer75Оценок пока нет
- TD-SILENT Series: In-Line Mixed Flow Duct Fans Ultra-QuietДокумент13 страницTD-SILENT Series: In-Line Mixed Flow Duct Fans Ultra-QuietJustin ReyesОценок пока нет