Вам также может понравиться
- Apostila CompletaДокумент39 страницApostila CompletaBiduBrasilОценок пока нет
- Treinamento em Prevenção de Acidentes em Andaimes - Rohr Tubulações e AndaimesДокумент47 страницTreinamento em Prevenção de Acidentes em Andaimes - Rohr Tubulações e AndaimesBruce Domingues de PaulaОценок пока нет
- Fundamentação Teórica Dirigida A Gestão EscolarДокумент6 страницFundamentação Teórica Dirigida A Gestão EscolarMarta Fonseca67% (3)
- Usina de AsfaltoДокумент13 страницUsina de AsfaltoCANAL VERMELHOОценок пока нет
- Projeto de Intervenção CidaДокумент10 страницProjeto de Intervenção CidaTainara Rodrigues100% (1)
- ABC Do SUS - Doutrinas e PrincipiosДокумент15 страницABC Do SUS - Doutrinas e PrincipiosGleyce Yara Kleison SalesОценок пока нет
- Conversa Haraway Azeredo RevisadaДокумент26 страницConversa Haraway Azeredo RevisadaDanielle MilioliОценок пока нет
- A Tomada de Nota - TextoДокумент5 страницA Tomada de Nota - TextoCarlos Mutondo0% (1)
- 01 - Regras de Convivência para Um Bom Andamento Do CursoДокумент1 страница01 - Regras de Convivência para Um Bom Andamento Do CursoBiduBrasilОценок пока нет
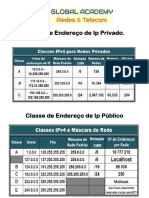
- 06 - Classe de Endereço de Ip Privado e PúblicoДокумент2 страницы06 - Classe de Endereço de Ip Privado e PúblicoBiduBrasilОценок пока нет
- Diagrama Ishikawa (Causa e Efeito)Документ1 страницаDiagrama Ishikawa (Causa e Efeito)BiduBrasilОценок пока нет
- Tema 2Документ25 страницTema 2BiduBrasilОценок пока нет
- Tema 3Документ14 страницTema 3BiduBrasilОценок пока нет
- Seja Auto Responsável-GcpДокумент1 страницаSeja Auto Responsável-GcpBiduBrasilОценок пока нет
- Passo A Passo para Montar Um ProvedorДокумент14 страницPasso A Passo para Montar Um ProvedorBiduBrasilОценок пока нет
- Curso de Gpon Fusão-FinalДокумент52 страницыCurso de Gpon Fusão-FinalBiduBrasil100% (1)
- Manual OLT 8820 GДокумент309 страницManual OLT 8820 GleitediegoОценок пока нет
- Conteudo - Ativação Clientes FTTHДокумент3 страницыConteudo - Ativação Clientes FTTHBiduBrasilОценок пока нет
- Instalador de Clientes FTTHДокумент13 страницInstalador de Clientes FTTHBiduBrasilОценок пока нет
- Instalador FTTHДокумент15 страницInstalador FTTHBiduBrasilОценок пока нет
- Tutorial - Provisionar OnuДокумент6 страницTutorial - Provisionar OnuBiduBrasilОценок пока нет
- Introdução Aos Materiais Poliméricos e Processamento de PolímerosДокумент299 страницIntrodução Aos Materiais Poliméricos e Processamento de PolímerosEvertonОценок пока нет
- Átomos e Elementos QuímicosДокумент19 страницÁtomos e Elementos QuímicosYesleiPaulinoОценок пока нет
- GUIAO Visita Estudo LISBOAДокумент3 страницыGUIAO Visita Estudo LISBOAhenschot798Оценок пока нет
- Relatório de Inspeção de PinturaДокумент1 страницаRelatório de Inspeção de PinturaScribdTranslationsОценок пока нет
- Artigo de Opinião Sobre Consumismo e o Meio AmbienteДокумент3 страницыArtigo de Opinião Sobre Consumismo e o Meio AmbienteAureliano Geraldo Dos Santos50% (2)
- Bioestatística: Tatiana Marques Da Silva ParentiДокумент9 страницBioestatística: Tatiana Marques Da Silva Parentichristian schwitzkiОценок пока нет
- Simulado FCC2 Gestaodepessoas 1Документ2 страницыSimulado FCC2 Gestaodepessoas 1Adriano DantasОценок пока нет
- Boletim Bibliográfico Doutoramentos 2014Документ8 страницBoletim Bibliográfico Doutoramentos 2014Alberto G. MesquitaОценок пока нет
- 01 - Intr Materiais06Документ13 страниц01 - Intr Materiais06api-3700388100% (2)
- NORIA - Manual de Bolso (By Jayme)Документ3 страницыNORIA - Manual de Bolso (By Jayme)jaymedribeiroОценок пока нет
- Cap 2 - Capac Carga Fund Rasas - 2017-1Документ92 страницыCap 2 - Capac Carga Fund Rasas - 2017-1Paula LondonОценок пока нет
- Na Carreira Do Divino - Cultura Caipira TeatroДокумент17 страницNa Carreira Do Divino - Cultura Caipira TeatroAna Garbuio100% (1)
- Direito Administrativo PDFight Poderes AdministrativosДокумент19 страницDireito Administrativo PDFight Poderes AdministrativosJuridico SantannaОценок пока нет
- Gedore Solutions2018 PDFДокумент32 страницыGedore Solutions2018 PDFValdemir Noronha CruzОценок пока нет
- Europass CV ESP 20131028 Neto PT 1Документ4 страницыEuropass CV ESP 20131028 Neto PT 1Cristiano NetoОценок пока нет
- Sisbic Relatório Final Kaio WalameДокумент7 страницSisbic Relatório Final Kaio WalameKaio SantanaОценок пока нет
- Edital PrInt - Versão (23-08-19)Документ14 страницEdital PrInt - Versão (23-08-19)luОценок пока нет
- Edicao 155 de 17 de Junho 2022Документ15 страницEdicao 155 de 17 de Junho 2022Obedias MuchinaОценок пока нет
- Evolução Do Ensino de Fisica No BrasilДокумент27 страницEvolução Do Ensino de Fisica No BrasilCarlosRosaОценок пока нет
- O Roubo Da FalaДокумент233 страницыO Roubo Da FalaTatiana Emilia Dias GomesОценок пока нет
- Teste Diagnóstico de 11º AnoДокумент6 страницTeste Diagnóstico de 11º AnoCláudia FerreiraОценок пока нет
- Cartilha GERDAU - PREVENCÌ AÌ - O DE ACIDENTES GRAVES E FATALIDADES JAN 2018Документ24 страницыCartilha GERDAU - PREVENCÌ AÌ - O DE ACIDENTES GRAVES E FATALIDADES JAN 2018max100% (1)
- Atividade Segundão Setembro CemsaДокумент2 страницыAtividade Segundão Setembro CemsaRosah GabryellyhОценок пока нет