Вам также может понравиться
- A Pedagogia Dos Caracois - Rubem Alves PDFДокумент76 страницA Pedagogia Dos Caracois - Rubem Alves PDFgretiliane carradore100% (1)
- Associação de Transformadores em ParaleloДокумент10 страницAssociação de Transformadores em ParaleloWalber MoraisОценок пока нет
- Projeto Hidrossanitário BreveДокумент7 страницProjeto Hidrossanitário BreveWalber MoraisОценок пока нет
- Business IntelligenceДокумент22 страницыBusiness IntelligenceMarcelo Alves100% (1)
- Apostila Eletrônica de Potência - Montiê Alves VitorinoДокумент149 страницApostila Eletrônica de Potência - Montiê Alves VitorinoWalber MoraisОценок пока нет
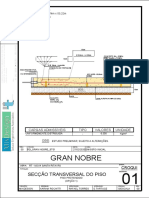
- Secção Transversal Do PisoДокумент1 страницаSecção Transversal Do PisoWalber MoraisОценок пока нет
- Operação de Geradores em ParaleloДокумент4 страницыOperação de Geradores em ParaleloWalber MoraisОценок пока нет
- Memorial Descritivo - Subestação 225 KVAДокумент13 страницMemorial Descritivo - Subestação 225 KVAWalber MoraisОценок пока нет
- Norma ABNT 10520 - Citações em Documentos PDFДокумент7 страницNorma ABNT 10520 - Citações em Documentos PDFHood171Оценок пока нет
- Montagem de Quadro de Transferência Automático para Grupo GeradorДокумент11 страницMontagem de Quadro de Transferência Automático para Grupo GeradorWalber MoraisОценок пока нет
- Guia para Iluminação Pública Vol. 1 - PUCRSДокумент46 страницGuia para Iluminação Pública Vol. 1 - PUCRSWalber MoraisОценок пока нет
- Eletrônica Analógica: resenha e agradecimentosДокумент169 страницEletrônica Analógica: resenha e agradecimentosMaques CesarОценок пока нет
- Bandeiras Tarifárias - Tarifa BrancaДокумент16 страницBandeiras Tarifárias - Tarifa BrancaWalber MoraisОценок пока нет
- Como Evitar Inconformidades No Projeto HidrossanitárioДокумент15 страницComo Evitar Inconformidades No Projeto HidrossanitárioWalber MoraisОценок пока нет
- Manual de Trabalhos Academicos ABNT UNINOVE PDFДокумент54 страницыManual de Trabalhos Academicos ABNT UNINOVE PDFRaphael FialhoОценок пока нет
- Precificação de Projetos No Brasil 2022Документ30 страницPrecificação de Projetos No Brasil 2022Walber MoraisОценок пока нет
- Guia de Proteção de Redes Elétricas SchneiderДокумент70 страницGuia de Proteção de Redes Elétricas SchneiderBione Melo Filho100% (3)
- Piso Concreto Fundação DiretaДокумент14 страницPiso Concreto Fundação DiretaWalber MoraisОценок пока нет
- Diagrama Comando PDFДокумент1 страницаDiagrama Comando PDFWalber MoraisОценок пока нет
- Soluções Pavimentos IndustriaisДокумент107 страницSoluções Pavimentos IndustriaisWalber MoraisОценок пока нет
- A Teoria Da Classe OciosaДокумент20 страницA Teoria Da Classe OciosaNilton Goulart100% (1)
- Darcy Ribeiro - Confissões PDFДокумент16 страницDarcy Ribeiro - Confissões PDFWalber MoraisОценок пока нет
- ArtLaje ProtendidaДокумент22 страницыArtLaje ProtendidaCristina VaniêrОценок пока нет
- Especificação de Piso de Concreto 1-1106-ET-001Документ23 страницыEspecificação de Piso de Concreto 1-1106-ET-001Walber MoraisОценок пока нет
- Ensaio O Inimigo Invisível - Prof. Dirlêi A BonfimДокумент2 страницыEnsaio O Inimigo Invisível - Prof. Dirlêi A BonfimWalber Morais100% (1)
- Bomba Centrífuga Thebe PDFДокумент1 страницаBomba Centrífuga Thebe PDFBrennoОценок пока нет
- Aplicação de Capacitores em Motores MonofásicosДокумент1 страницаAplicação de Capacitores em Motores MonofásicosWalber MoraisОценок пока нет
- Universidade de Passo FundoДокумент63 страницыUniversidade de Passo FundoWilson Roberto de OliveiraОценок пока нет
- Bomba Centrífuga Thebe PDFДокумент1 страницаBomba Centrífuga Thebe PDFBrennoОценок пока нет
- TCC - Aplicação Da Manufatura Auxiliada Por Computador (Cam) PDFДокумент77 страницTCC - Aplicação Da Manufatura Auxiliada Por Computador (Cam) PDFWalber MoraisОценок пока нет
- Manual BP1000 WebДокумент12 страницManual BP1000 WebAdri SoaresОценок пока нет
- CASTILLO, R. FREDERICO S., Espaço Geografico, Produção e Movimento Uma Reflexao Sobre o Conceito de Circuito Espacial ProdutivoДокумент13 страницCASTILLO, R. FREDERICO S., Espaço Geografico, Produção e Movimento Uma Reflexao Sobre o Conceito de Circuito Espacial Produtivoleofreemam100% (1)
- A Influência Da Avaliação de Desempenho No Desenvolvimento ProfissionalДокумент13 страницA Influência Da Avaliação de Desempenho No Desenvolvimento ProfissionalSergio Alfredo Macore100% (1)
- Política Mineral Do Brasil, Dois Ensaios Críticos - Osny Duarte Pereira, 1987 PDFДокумент75 страницPolítica Mineral Do Brasil, Dois Ensaios Críticos - Osny Duarte Pereira, 1987 PDFEduardo CruzОценок пока нет
- Cadeia Produtiva Do MilhoДокумент110 страницCadeia Produtiva Do MilhoVirgínia Abreu100% (1)
- Apostila Controle de Qualidade SenaiДокумент20 страницApostila Controle de Qualidade SenaiPaulaОценок пока нет
- João Maria Funzi ChimpoloДокумент70 страницJoão Maria Funzi Chimpolodjoemarlan100% (2)
- Revista PME Lider 18 Junho 2015Документ210 страницRevista PME Lider 18 Junho 2015Wilson NevesОценок пока нет
- O Método 5S: Organização e ProdutividadeДокумент21 страницаO Método 5S: Organização e ProdutividadeAlexandre CattaniОценок пока нет
- Tese-Susana BritoДокумент58 страницTese-Susana Britofmingocho305Оценок пока нет
- D0ded1 PDFДокумент651 страницаD0ded1 PDFNayara Cristina de Magalhães SousaОценок пока нет
- Auditoria AmbientalДокумент3 страницыAuditoria AmbientalsheylibombeiraОценок пока нет
- Inovação e Empreendedorismo 3Документ15 страницInovação e Empreendedorismo 3Pedro SpressãoОценок пока нет
- Fundamentos do empreendedorismo: competitividade e inovaçãoДокумент109 страницFundamentos do empreendedorismo: competitividade e inovaçãoDavid Willian100% (1)
- Dalva PDFДокумент21 страницаDalva PDFLarissa WagnerОценок пока нет
- Mineração de bauxita no Brasil: desafios e oportunidades para o desenvolvimento sustentávelДокумент66 страницMineração de bauxita no Brasil: desafios e oportunidades para o desenvolvimento sustentávelInfamara ManéОценок пока нет
- Diario Oficial 2016-10-26 CompletoДокумент68 страницDiario Oficial 2016-10-26 CompletoMarco Aurélio SiqueiraОценок пока нет
- Guia Do Reciclador HP Série P1000 46Br - Sep11Документ68 страницGuia Do Reciclador HP Série P1000 46Br - Sep11PisoSeguroОценок пока нет
- SIMBRACS 2013 destaca setor terciárioДокумент88 страницSIMBRACS 2013 destaca setor terciárioCortana PandoraОценок пока нет
- Atc 1 - Introdução Ao Layout IndustrialДокумент6 страницAtc 1 - Introdução Ao Layout IndustrialCléber Fernando HomemОценок пока нет
- Cooperação entre MPE: estudo de 4 arranjosДокумент135 страницCooperação entre MPE: estudo de 4 arranjosRicardoОценок пока нет
- Café Nas Montanhas 2 EdiçãoДокумент172 страницыCafé Nas Montanhas 2 EdiçãoJonatam Augusto MarinhoОценок пока нет
- Estratégias em Novo Paradigma GlobalДокумент8 страницEstratégias em Novo Paradigma GlobalVieiraОценок пока нет
- Mapa Da Indústria 2022Документ212 страницMapa Da Indústria 2022rivasОценок пока нет
- Direitos sociais na globalizaçãoДокумент20 страницDireitos sociais na globalizaçãoMaurílio NepomucenoОценок пока нет
- Adhocracia e BurocraciaДокумент19 страницAdhocracia e BurocraciaCarlos Eduardo Franco AzevedoОценок пока нет
- 1º Anuário TIC para A Administração Pública, Saúde e Educação (IDC, 2010)Документ156 страниц1º Anuário TIC para A Administração Pública, Saúde e Educação (IDC, 2010)Ricardo Nuno SilvaОценок пока нет
- Tubos Distribuídos Pela Imefer Farão Parte DaДокумент4 страницыTubos Distribuídos Pela Imefer Farão Parte DapumzinОценок пока нет
- Violência no desporto: causas, formas e consequênciasДокумент9 страницViolência no desporto: causas, formas e consequênciasRúben BОценок пока нет