Вам также может понравиться
- UntitledДокумент1 страницаUntitledRodrigoОценок пока нет
- Dias PE Estatistica Curso Fisio 6 P 2021 02 para Alunos NoiteДокумент7 страницDias PE Estatistica Curso Fisio 6 P 2021 02 para Alunos NoiteRodrigoОценок пока нет
- Carta DemocraticaДокумент7 страницCarta DemocraticaRodrigoОценок пока нет
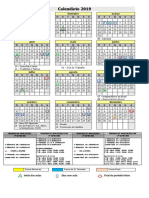
- Calendário 2019 Versão FinalДокумент4 страницыCalendário 2019 Versão FinalRodrigoОценок пока нет
- Dias Horario Utp 2020 1Документ3 страницыDias Horario Utp 2020 1RodrigoОценок пока нет
- Evolução Na Automação de Painéis Elétricos - Automação IndustrialДокумент2 страницыEvolução Na Automação de Painéis Elétricos - Automação IndustrialRodrigoОценок пока нет
- Cecílio J. L. Pimentel - Proteção DigitalДокумент111 страницCecílio J. L. Pimentel - Proteção DigitalRodrigoОценок пока нет
- 5.1 - Números Índices SimplesДокумент28 страниц5.1 - Números Índices SimplesRodrigoОценок пока нет
- Numind 0Документ92 страницыNumind 0RodrigoОценок пока нет
- TanqueДокумент11 страницTanqueRodrigoОценок пока нет
- Linhas de Transmissão - Cálculo MecânicoДокумент34 страницыLinhas de Transmissão - Cálculo MecânicoMatheus Mazzuchello100% (1)
- Dragon Flyz - Um Projeto NaNoWriMo 2012 Capítulo 1 - Evidência, Um Dragão Flyz Fanfic - FanFictionДокумент4 страницыDragon Flyz - Um Projeto NaNoWriMo 2012 Capítulo 1 - Evidência, Um Dragão Flyz Fanfic - FanFictionNereu da SilvaОценок пока нет
- Teste Nobreak Sms Slim PDFДокумент6 страницTeste Nobreak Sms Slim PDFMaiquel MendesОценок пока нет
- MariposaДокумент11 страницMariposaRui PereiraОценок пока нет
- Armazenamento de CilindArmazenamento de Cilindro de Gases - 03092 (E 1) .Pdfro de Gases - 03092 (E 1)Документ3 страницыArmazenamento de CilindArmazenamento de Cilindro de Gases - 03092 (E 1) .Pdfro de Gases - 03092 (E 1)Rosemary RosemaryОценок пока нет
- PÓS LABORATÓRIO - IsomeriaДокумент3 страницыPÓS LABORATÓRIO - Isomeriatonnyquimica0% (1)
- Artigo Da Norma NBR 60439-1Документ17 страницArtigo Da Norma NBR 60439-1TSEenergiaeautomacaoОценок пока нет
- Painel Monolítico de Eps PDFДокумент3 страницыPainel Monolítico de Eps PDFmand42Оценок пока нет
- Ged 15303Документ55 страницGed 15303CarloSilva100% (1)
- Rorschach CábulaДокумент10 страницRorschach CábulaBruno BrazОценок пока нет
- Viga Vagao - 3Документ66 страницViga Vagao - 3Robson RibeiroОценок пока нет
- Plano de Aula 4 EstaçõesДокумент6 страницPlano de Aula 4 EstaçõesLaryane Serafim Teodoro0% (1)
- Terapia Manual I PDFДокумент11 страницTerapia Manual I PDFravennaleite100% (1)
- Telha ZipadaДокумент3 страницыTelha ZipadaTamara SalesОценок пока нет
- LAB ELETRIC - Exp 4 Experimentos Como Gerador de Van de Graaff PDFДокумент2 страницыLAB ELETRIC - Exp 4 Experimentos Como Gerador de Van de Graaff PDFJackson AngellОценок пока нет
- 308 Transmissà o Automã¡tica DSG 02EДокумент68 страниц308 Transmissà o Automã¡tica DSG 02ECleverton Lehmkuhl Lourenço100% (3)
- Relatório 6 - Fisica 1Документ5 страницRelatório 6 - Fisica 1Jullyanna AbadeОценок пока нет
- Mruv - Cap - 2016Документ9 страницMruv - Cap - 2016Ronaldo Da Costa CunhaОценок пока нет
- MisturadorДокумент174 страницыMisturadorLarissa CarvalhoОценок пока нет
- Demonstração Da Irracionalidade Do Número de Euler - Rodrigo R. GonçalezДокумент6 страницDemonstração Da Irracionalidade Do Número de Euler - Rodrigo R. GonçalezRodrigo GonçalezОценок пока нет
- Por PROBrochure2014Документ110 страницPor PROBrochure2014Edgar WendelОценок пока нет
- 6768 Máq Elétricas RotativasДокумент24 страницы6768 Máq Elétricas RotativasMaitsudá MatosОценок пока нет
- Lista - Lançamentos Horizontal e OblíquoДокумент6 страницLista - Lançamentos Horizontal e Oblíquoivan talonОценок пока нет
- Leis Da LógicaДокумент3 страницыLeis Da LógicaRafaelMarquesОценок пока нет
- Relatório de Ensaios de Determinação de Tamanho de Grão AustenísticoДокумент2 страницыRelatório de Ensaios de Determinação de Tamanho de Grão AustenísticoBruno LucianoОценок пока нет
- Exercícios e Gabarito de ClapeyronДокумент6 страницExercícios e Gabarito de ClapeyronClaudio Roberto100% (1)
- Memorial Justificativo - Como FazerДокумент66 страницMemorial Justificativo - Como FazerHernandodeNoronha0% (1)
- Fispq Cal HidratadaДокумент4 страницыFispq Cal Hidratadatstcarlos100% (1)
- Como Gerar Um Pulso Eletromagnético - 19 PassosДокумент4 страницыComo Gerar Um Pulso Eletromagnético - 19 PassosAri SimõesОценок пока нет
- Apostila Automação Sensores e Atuadores (CEFET)Документ90 страницApostila Automação Sensores e Atuadores (CEFET)Luiz Gustavo CaldeiraОценок пока нет