Вам также может понравиться
- Curso Get-Esm 2014 CДокумент2 страницыCurso Get-Esm 2014 CNelson RuizОценок пока нет
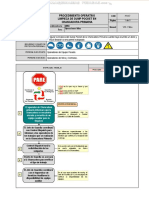
- Material Limpieza Dump Pocket Chancadora Primaria Procedimiento Operativo Atoro Rock Breaker Verificacion Ejecucion PDFДокумент3 страницыMaterial Limpieza Dump Pocket Chancadora Primaria Procedimiento Operativo Atoro Rock Breaker Verificacion Ejecucion PDFNelson RuizОценок пока нет
- Fotorresistencia PDFДокумент10 страницFotorresistencia PDFNelson RuizОценок пока нет
- FAG Rodamientos BipartidosДокумент30 страницFAG Rodamientos BipartidosJunior BalabarcaОценок пока нет
- Como Representar Un SistemaДокумент5 страницComo Representar Un SistemaCrixtersОценок пока нет
- Resumen TGSДокумент12 страницResumen TGSEnzo OrtelladoОценок пока нет
- Evaluacion Modulo 2 - EmpresasДокумент18 страницEvaluacion Modulo 2 - EmpresasAnahis Martínez71% (24)
- Entregable 1 Acondiconadores SeñalesДокумент7 страницEntregable 1 Acondiconadores SeñalesDiana JeanОценок пока нет
- Hommel en Es PDFДокумент22 страницыHommel en Es PDFjretamalesОценок пока нет
- Apuntes PsicoterapiaДокумент40 страницApuntes PsicoterapiaCarla JaimesОценок пока нет
- Unidad 7 ControlДокумент62 страницыUnidad 7 ControlMartin medranoОценок пока нет
- Resumen Capitulo 13 Modelo CircumplejoДокумент6 страницResumen Capitulo 13 Modelo CircumplejoFranTorresYimaОценок пока нет
- Quiz 2 Control de CalidadДокумент5 страницQuiz 2 Control de CalidadEDWARDОценок пока нет
- Pendulo Invertido MatlabДокумент11 страницPendulo Invertido MatlabNABEОценок пока нет
- ENFOQUE SISTÉMICO Clase 1 PPTДокумент47 страницENFOQUE SISTÉMICO Clase 1 PPTCarolina CarvajalОценок пока нет
- 7 Peggy Papp El Proceso de CambioДокумент7 страниц7 Peggy Papp El Proceso de Cambiorob75% (4)
- Taller 4. Identificando Cumplimiento de PrincipiosДокумент15 страницTaller 4. Identificando Cumplimiento de Principiosguardiadeleon2003Оценок пока нет
- Test T. 3, 4 Y 5Документ44 страницыTest T. 3, 4 Y 5AnaОценок пока нет
- 21502-15 TECNOLOGÍA DE CONTROL - Introduccion Al Modelado de Sistemas Fisicos PDFДокумент15 страниц21502-15 TECNOLOGÍA DE CONTROL - Introduccion Al Modelado de Sistemas Fisicos PDFFox NekОценок пока нет
- Con Qué Reemplazar Las Evaluaciones de DesempeñoДокумент2 страницыCon Qué Reemplazar Las Evaluaciones de DesempeñoMacarena PalmaОценок пока нет
- Funcion de ControlДокумент6 страницFuncion de ControlMonica Yvette López ValdepeñaОценок пока нет
- Anatomía y Fisiología IДокумент39 страницAnatomía y Fisiología IDanni TellerОценок пока нет
- La Quinta Disciplina de Peter Senge (Resumen)Документ64 страницыLa Quinta Disciplina de Peter Senge (Resumen)zanzoncitoОценок пока нет
- Ingeniería de Sistemas 6TO TETRA IISДокумент24 страницыIngeniería de Sistemas 6TO TETRA IISguadalupeОценок пока нет
- Von Bertalanffy, L. (2004) - El Significado de La Teoría General de Los SistemasДокумент2 страницыVon Bertalanffy, L. (2004) - El Significado de La Teoría General de Los SistemasH Andrés de MaríaОценок пока нет
- Trabajo de Intercambiadores de CalorДокумент21 страницаTrabajo de Intercambiadores de CalorLimey JuniorОценок пока нет
- Liderazgo Avanzado-EuskalitДокумент51 страницаLiderazgo Avanzado-EuskalitmacusoОценок пока нет
- Parcial Dibujo TecnicoДокумент12 страницParcial Dibujo Tecniconancy yissela gonzalez rodriguez0% (1)
- Tipo de Controladores en Servomecanismo y ServosДокумент6 страницTipo de Controladores en Servomecanismo y ServosVictor Ivan M BОценок пока нет
- Funcion de Regulacion y ControlДокумент4 страницыFuncion de Regulacion y ControlLucia Meza50% (2)
- Manual de Sistemas Tecnologicos 2º Año-1Документ17 страницManual de Sistemas Tecnologicos 2º Año-1Christian Ruiz DiazОценок пока нет
- Principios de La Teoría General de SistemasДокумент9 страницPrincipios de La Teoría General de SistemasJorge Luis Perez CastroОценок пока нет
- Corrección de Los Errores en La Producción EscritaДокумент11 страницCorrección de Los Errores en La Producción EscritaΝίκος ΛυκОценок пока нет
- Plan de Trabajo Practica de Responsabilidad AmbientalДокумент5 страницPlan de Trabajo Practica de Responsabilidad AmbientalJuly Alejandra BEJARANO VELASQUEZОценок пока нет