Вам также может понравиться
- Exam 3 Material Science MATS 2001 UMN Fall 2012Документ7 страницExam 3 Material Science MATS 2001 UMN Fall 2012Zaki Smn100% (1)
- Objectives ThermodynamicsДокумент5 страницObjectives ThermodynamicsM.ThirunavukkarasuОценок пока нет
- IBO 2010 Korea Theory Paper 2Документ73 страницыIBO 2010 Korea Theory Paper 2Bikash Ranjan RayОценок пока нет
- Ce001 Quiz 2cДокумент2 страницыCe001 Quiz 2cBee-Anne Bautista FranciscoОценок пока нет
- Photosynthesis Light Reaction ATP Formation Electron Transport Cytochromes ChloroplastsДокумент4 страницыPhotosynthesis Light Reaction ATP Formation Electron Transport Cytochromes ChloroplastsFarooq AliОценок пока нет
- Extra Momentum Transfer QuestionsДокумент5 страницExtra Momentum Transfer QuestionsaОценок пока нет
- Sri Lankan Biology Olympiad 2008Документ5 страницSri Lankan Biology Olympiad 2008Science Olympiad BlogОценок пока нет
- CH 21Документ45 страницCH 21JayelleОценок пока нет
- S4 Aceiteka 2017 Agriculture P2Документ7 страницS4 Aceiteka 2017 Agriculture P2Eremu Thomas100% (1)
- Momentum Transfer Take Home Quiz: Name: Date: Year / Section: ScoreДокумент1 страницаMomentum Transfer Take Home Quiz: Name: Date: Year / Section: ScoreRobert DelfinОценок пока нет
- Files2 BiologyDocuments Biology of CottonДокумент50 страницFiles2 BiologyDocuments Biology of CottonanamikashikhaОценок пока нет
- SPH4U 1.6 - Relative MotionДокумент14 страницSPH4U 1.6 - Relative MotionMatthew GreesonОценок пока нет
- Mesl Set 1Документ8 страницMesl Set 1RENE JOSHUA PECASOОценок пока нет
- NQE 2007 Biology SolutionsДокумент2 страницыNQE 2007 Biology SolutionsmartynapetОценок пока нет
- Thermo 1 & 2Документ4 страницыThermo 1 & 2Oloj YuОценок пока нет
- 12th Physics Additional Questions (Vol 1)Документ135 страниц12th Physics Additional Questions (Vol 1)Ashok Pradhan50% (2)
- Topic 8 Cell Respiration and PhotosynthesisДокумент12 страницTopic 8 Cell Respiration and PhotosynthesisCedric Williams100% (1)
- Chemistry Units 3 and 4 Practice Questions GuideДокумент51 страницаChemistry Units 3 and 4 Practice Questions GuideElmo Bluey100% (1)
- Laplace Transform Good RevisionДокумент20 страницLaplace Transform Good RevisionraymondushrayОценок пока нет
- PMC Practice Test Questions of Heat & ThermodynamicsДокумент25 страницPMC Practice Test Questions of Heat & ThermodynamicsAb Hadi100% (1)
- Some Study Questions For USABOДокумент32 страницыSome Study Questions For USABORay Sanchez100% (1)
- Measuring Pressure and Temperature with a Steam BoilerДокумент8 страницMeasuring Pressure and Temperature with a Steam BoilerKram YnarОценок пока нет
- 9781292035444Документ7 страниц9781292035444Bwn Jangyeswar KumarОценок пока нет
- IBO 2010 Korea Theory Answers 2Документ30 страницIBO 2010 Korea Theory Answers 2martynapetОценок пока нет
- Pre Board Math B PDFДокумент6 страницPre Board Math B PDFAnjoe Mhar NocheОценок пока нет
- Applications of Laplace Transform Unit Step Functions and Dirac Delta FunctionsДокумент8 страницApplications of Laplace Transform Unit Step Functions and Dirac Delta FunctionsJASH MATHEWОценок пока нет
- 1999 AP Biology TestДокумент25 страниц1999 AP Biology TestTalal NabulsiОценок пока нет
- Heat Transfer Question BankДокумент3 страницыHeat Transfer Question BankkarthikОценок пока нет
- DAT 2008 Math1Документ3 страницыDAT 2008 Math1Arnelson DerechoОценок пока нет
- Nucleic Acids and Protein Synthesis RevisedДокумент60 страницNucleic Acids and Protein Synthesis Revisedemanuel coatesОценок пока нет
- Phys 253 Thermal PhysicsДокумент1 019 страницPhys 253 Thermal Physicsdavid_berardo6537Оценок пока нет
- Electrochemistry 494 PDFДокумент55 страницElectrochemistry 494 PDFHarsh SaxenaОценок пока нет
- Chemical Equilibrium Post LabДокумент53 страницыChemical Equilibrium Post LabJimilyn Michelle HofeleñaОценок пока нет
- ChE426 HW Additional ProblemsДокумент1 страницаChE426 HW Additional ProblemsShixia XuОценок пока нет
- Food TestsДокумент13 страницFood TestsBilal Shahid100% (1)
- Chapter 10 Kingdom Animalia MCQs PDF Class 11Документ11 страницChapter 10 Kingdom Animalia MCQs PDF Class 11Rahi HabibОценок пока нет
- ME495 Lab - Plate Heat Exchanger - Expt Number 5Документ5 страницME495 Lab - Plate Heat Exchanger - Expt Number 5Kammy LaiОценок пока нет
- Experiment P06: To Show That The Decomposition of Hydrogen Peroxide Is A First Order ReactionДокумент4 страницыExperiment P06: To Show That The Decomposition of Hydrogen Peroxide Is A First Order ReactionMohd Hafiz Aiman100% (1)
- Stefan Boltzmann Law PDFДокумент3 страницыStefan Boltzmann Law PDFESAKKIMALA SОценок пока нет
- Titration ExerciseДокумент2 страницыTitration ExerciseYemima KurniaОценок пока нет
- Biology NCERT Class 6-12 compilation for UPSC CSE PrelimsДокумент292 страницыBiology NCERT Class 6-12 compilation for UPSC CSE PrelimsSyed100% (1)
- Physics XII / Chapter 1 (HEAT) With KeyДокумент5 страницPhysics XII / Chapter 1 (HEAT) With KeyShujat AbroОценок пока нет
- Diffusion ExamplesДокумент63 страницыDiffusion ExamplesNeelesh TanwarОценок пока нет
- Topic 7Документ6 страницTopic 7Bert ManОценок пока нет
- IB Physics 2 Assess WSE2Документ3 страницыIB Physics 2 Assess WSE2Abhijeet GawandeОценок пока нет
- Polyurethane ChemistryДокумент15 страницPolyurethane Chemistryyoga nayagi punichelvana100% (1)
- Sample Problems in BouyancyДокумент2 страницыSample Problems in BouyancyJohn AgbayaniОценок пока нет
- Bio 101-Exam2KeyДокумент10 страницBio 101-Exam2KeyRobbie GroveОценок пока нет
- Physical Chemistry Reviewer - Laws of ThermodynamicsДокумент2 страницыPhysical Chemistry Reviewer - Laws of ThermodynamicsJerome SadudaquilОценок пока нет
- Heat Transfer Chapter 3Документ45 страницHeat Transfer Chapter 3Gregory Simmon100% (1)
- TribunaloLo Ex#6Документ14 страницTribunaloLo Ex#6Jaylou OpondaОценок пока нет
- British Biology Olympiad 2004: Part A QuestionsДокумент22 страницыBritish Biology Olympiad 2004: Part A QuestionsMalvina YuanОценок пока нет
- MATLAB Code For Bisection MethodДокумент1 страницаMATLAB Code For Bisection MethodZia JanОценок пока нет
- UNIFAC - Smith, VanNess, Abbott PDFДокумент7 страницUNIFAC - Smith, VanNess, Abbott PDFAlejandra InsuastyОценок пока нет
- Thermodynamics 2 E7Документ41 страницаThermodynamics 2 E7taya699Оценок пока нет
- Usabo2012 Open ExamДокумент11 страницUsabo2012 Open ExamsiderabioОценок пока нет
- acs_2017s2_assn1Документ5 страницacs_2017s2_assn1MiraelОценок пока нет
- Control system labДокумент15 страницControl system labhassan ullah khanОценок пока нет
- CS Two MarksДокумент7 страницCS Two MarkssivaeinfoОценок пока нет
- acs_2019s1_assn1Документ5 страницacs_2019s1_assn1MiraelОценок пока нет
- R134a Flow Patterns in Small Diameter TubesДокумент8 страницR134a Flow Patterns in Small Diameter TubesIan Jimbo ConstantinoОценок пока нет
- Thinking Out Loud - LTR - Not PDFДокумент5 страницThinking Out Loud - LTR - Not PDFTerence BundelaОценок пока нет
- PsychrometryДокумент17 страницPsychrometryChirag GoyalОценок пока нет
- It Might Be You - LTR - NotДокумент4 страницыIt Might Be You - LTR - NotIan Jimbo ConstantinoОценок пока нет
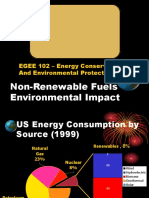
- Non-Renewable Fuels Environmental Impact: EGEE 102 - Energy Conservation and Environmental ProtectionДокумент40 страницNon-Renewable Fuels Environmental Impact: EGEE 102 - Energy Conservation and Environmental ProtectionIan Jimbo ConstantinoОценок пока нет
- School-Writing Budget of WorkДокумент6 страницSchool-Writing Budget of WorkIan Jimbo ConstantinoОценок пока нет
- Hanna Hi - 2211 - 2210Документ4 страницыHanna Hi - 2211 - 2210Ian Jimbo ConstantinoОценок пока нет
- Problem 115Документ4 страницыProblem 115Ian Jimbo Constantino100% (2)
- Strength of Materials 4th Edition by Pytel and SingerДокумент5 страницStrength of Materials 4th Edition by Pytel and SingerIan Jimbo Constantino82% (11)
- Test Format Light & WaveДокумент7 страницTest Format Light & WaveDewan Olin ChotepadaeОценок пока нет
- Understanding Ball LensesДокумент3 страницыUnderstanding Ball Lensesbraulio.dantas-1Оценок пока нет
- Procal CEMSДокумент4 страницыProcal CEMSIklanОценок пока нет
- 915nm 976nm 10W Fiber Coupled Module Oclaro-1416083626Документ5 страниц915nm 976nm 10W Fiber Coupled Module Oclaro-1416083626thuyОценок пока нет
- Andrew Db983h65e-M PDFДокумент1 страницаAndrew Db983h65e-M PDFjorgeОценок пока нет
- Acoustic Emission Testing and Thermographic TestingДокумент45 страницAcoustic Emission Testing and Thermographic TestingShivam GaurОценок пока нет
- Phototransistor QSE113Документ4 страницыPhototransistor QSE113Jeffo LeoОценок пока нет
- Manufacturing Engineer Laser Optical in Portland OR San Jose CA Resume John LafrentzДокумент2 страницыManufacturing Engineer Laser Optical in Portland OR San Jose CA Resume John LafrentzJohnLafrentzОценок пока нет
- Steven Greer - CE5-CSETI - 06. Additional Equipment - DescriptionДокумент4 страницыSteven Greer - CE5-CSETI - 06. Additional Equipment - DescriptionExopolitika Magyarország100% (1)
- Corus Steel - Stock Range & SpecificationsДокумент53 страницыCorus Steel - Stock Range & SpecificationsseanfsmythОценок пока нет
- Wood Densification and Thermal Modification: Hardness, Set-Recovery and MicromorphologyДокумент12 страницWood Densification and Thermal Modification: Hardness, Set-Recovery and MicromorphologyyonОценок пока нет
- Office Machine Cours OutilneДокумент2 страницыOffice Machine Cours Outilneኮኾብ ጽባሕОценок пока нет
- Determination of Benzene in Gasoline by Astm D6277 With Spectrum TwoДокумент3 страницыDetermination of Benzene in Gasoline by Astm D6277 With Spectrum TwoSerhiyОценок пока нет
- Ultrahigh Strain and Piezoelectric Behavior in Relaxor Based Ferroelectric Single CrystalsДокумент9 страницUltrahigh Strain and Piezoelectric Behavior in Relaxor Based Ferroelectric Single CrystalsgeansoОценок пока нет
- Fire Detection and Alarm SystemДокумент76 страницFire Detection and Alarm SystemShambhu Saran Singh100% (4)
- Ultrasonic Machining (USM) : Dr. Harlal Singh MaliДокумент11 страницUltrasonic Machining (USM) : Dr. Harlal Singh MaliPrashant Singh SankhalaОценок пока нет
- A278955818 - 25375 - 27 - 2019 - Historical Development of Remote SensingДокумент39 страницA278955818 - 25375 - 27 - 2019 - Historical Development of Remote SensingRohit SheemarОценок пока нет
- Ec1011 Television Video EngineeringДокумент21 страницаEc1011 Television Video Engineeringyesyouareesh100% (3)
- Quality Assurance - Schwarz 2015Документ66 страницQuality Assurance - Schwarz 2015Moud Sakly100% (1)
- Bend 4Документ2 страницыBend 4siva_sankar826481Оценок пока нет
- Differences Between Optical and Ultrasonic Electrolyte Analyzer Bubble DetectorsДокумент3 страницыDifferences Between Optical and Ultrasonic Electrolyte Analyzer Bubble DetectorsAbdalrhman FarajОценок пока нет
- Spray Cooling Masters ThesisДокумент151 страницаSpray Cooling Masters ThesisDr. Brian GlassmanОценок пока нет
- Optokon PM 212 enДокумент23 страницыOptokon PM 212 enGeorge MasonОценок пока нет
- Hot Air Plastic Welding For PolyethyleneДокумент24 страницыHot Air Plastic Welding For PolyethyleneAkshay rajanОценок пока нет
- SFP 550e3 PDFДокумент2 страницыSFP 550e3 PDFanoushes1Оценок пока нет
- Laser guidance system for orthopedic surgeryДокумент18 страницLaser guidance system for orthopedic surgerymohadeseОценок пока нет
- M Schemes 33Документ3 страницыM Schemes 33Dhanushka Bandara33% (6)
- Application Instructions - LaserFlexДокумент2 страницыApplication Instructions - LaserFlexFreddy YorroОценок пока нет
- TM 750 116Документ78 страницTM 750 1161Y875Оценок пока нет
- Basic Introduction of Fabrication Flow NewДокумент191 страницаBasic Introduction of Fabrication Flow NewSoojinthiran AhtmanathanОценок пока нет