Вам также может понравиться
- Ejericio para Resolver Con El Método GrafcetДокумент3 страницыEjericio para Resolver Con El Método GrafcetLUIS ESCOBAR MINAОценок пока нет
- Circuitos RC y RLДокумент14 страницCircuitos RC y RLNathaly Gonzalez DíazОценок пока нет
- Practica 11Документ7 страницPractica 11Dennise Kimberly Reza GallegosОценок пока нет
- Monoestable Astable PDFДокумент16 страницMonoestable Astable PDFErnesto RosalesОценок пока нет
- Diagrama de Estados PDFДокумент5 страницDiagrama de Estados PDFRamses GarateОценок пока нет
- Problemas de A.I. 1Документ12 страницProblemas de A.I. 1Luis SarabiaОценок пока нет
- Lab2580 6 12019Документ3 страницыLab2580 6 12019Claudia BarcoОценок пока нет
- Lab2580 6 12019 PDFДокумент3 страницыLab2580 6 12019 PDFOmarxs MagZunОценок пока нет
- Lab2580 6 12019 PDFДокумент3 страницыLab2580 6 12019 PDFMichael pabloОценок пока нет
- Inversor Monofásico Medio PuenteДокумент109 страницInversor Monofásico Medio PuenteÁngel Valencia Armijos100% (2)
- EP4a ACДокумент24 страницыEP4a ACimqnuyserverОценок пока нет
- Automatismo Secuencial Con Bobinas TemporizadasДокумент8 страницAutomatismo Secuencial Con Bobinas TemporizadasCamilo Salamanca CobosОценок пока нет
- GUIA Trabajo Experimental Analisis Transitorio Parte 1Документ6 страницGUIA Trabajo Experimental Analisis Transitorio Parte 1Jose Raul Cardenas DavilaОценок пока нет
- Ejercicios Cinemática Física 1Документ3 страницыEjercicios Cinemática Física 1Kansocrah NakОценок пока нет
- PracticaDeCircuitosDigitales SemaforoДокумент8 страницPracticaDeCircuitosDigitales SemaforojorgevillasaraviaОценок пока нет
- Logica Digital Examen de InternteДокумент3 страницыLogica Digital Examen de InternteUreña Personaje Jesus UreñaОценок пока нет
- Cronometro de Seguidor de LineaДокумент17 страницCronometro de Seguidor de LineaFernando OblitasОценок пока нет
- CircuitoseléctricosI Taller5 AnálisisdecondicionesinicialesДокумент1 страницаCircuitoseléctricosI Taller5 Análisisdecondicionesinicialesjulitri21Оценок пока нет
- E2 3E2 2018 JUL10 Final v1Документ2 страницыE2 3E2 2018 JUL10 Final v1Tomas HelmanОценок пока нет
- Diagnostico de Tarjeta TNTUДокумент40 страницDiagnostico de Tarjeta TNTUjose torresОценок пока нет
- Problemas Seminario Examen Final - 2020 - 2Документ6 страницProblemas Seminario Examen Final - 2020 - 2ronaldОценок пока нет
- Guia de Trabajo Experimental 2 Circuitos IiiДокумент6 страницGuia de Trabajo Experimental 2 Circuitos IiilauraximenauvaОценок пока нет
- AUTI-1010 ACE-04 Wire NumberingДокумент2 страницыAUTI-1010 ACE-04 Wire NumberingjorgecarranzaОценок пока нет
- Lab 6 Elt 2731Документ15 страницLab 6 Elt 2731Ricardo G ChipanaОценок пока нет
- Cálculo de Tiempos de AceleraciónДокумент16 страницCálculo de Tiempos de AceleraciónFFFFОценок пока нет
- Lab Ie 12022Документ2 страницыLab Ie 12022Luis Diego Saravia ChoqueОценок пока нет
- UNAB - ED - 2018 - II - Parcial 3 - Lunes PDFДокумент2 страницыUNAB - ED - 2018 - II - Parcial 3 - Lunes PDFAndres RinconОценок пока нет
- Guia 3Документ2 страницыGuia 3Ossmany Pizzati teamPUMA UNAH-VSОценок пока нет
- 7 Unidad de RolandoДокумент8 страниц7 Unidad de RolandoAdrián L'r CortésОценок пока нет
- Lab 3 Circuitos Ii PDFДокумент7 страницLab 3 Circuitos Ii PDFJhon Jairo AnayaОценок пока нет
- Actividades Parte 2 Vazquez SoniaДокумент5 страницActividades Parte 2 Vazquez SoniaMiriam Reyes MontenegroОценок пока нет
- Detector Corte PDFДокумент6 страницDetector Corte PDFJose HerreraОценок пока нет
- 5 - Tableros de MediciónДокумент38 страниц5 - Tableros de MediciónJorge Enrique Tello EstradaОценок пока нет
- Manual Tems Suspension Aire Toyota PDFДокумент100 страницManual Tems Suspension Aire Toyota PDFwalter montañoОценок пока нет
- Press Cascada CTRL X PLCДокумент15 страницPress Cascada CTRL X PLCphillamxОценок пока нет
- Iv - 02 Metodo de La Ecuacion de Los Tres MomentosДокумент21 страницаIv - 02 Metodo de La Ecuacion de Los Tres MomentosCatalina Montoya100% (1)
- Clase 2 TransformadoresДокумент30 страницClase 2 TransformadoresBendryx BelloОценок пока нет
- 08 Reguladores de Corriente AlternaДокумент22 страницы08 Reguladores de Corriente AlternaMalco BaldovinoОценок пока нет
- IDO09 - Tarea9 - CHRISTIAN JAVIERДокумент9 страницIDO09 - Tarea9 - CHRISTIAN JAVIERChristian TipantuñaОценок пока нет
- Toyota YarisДокумент14 страницToyota YarisAlexAnder Cortez86% (7)
- Universidad Autónoma de Nuevo León: Facultad de Ingeniería Mecánica Y EléctricaДокумент8 страницUniversidad Autónoma de Nuevo León: Facultad de Ingeniería Mecánica Y EléctricaJavier SanchezОценок пока нет
- Formulario de ElectricidadДокумент1 страницаFormulario de ElectricidadFelipe Hdez LopezОценок пока нет
- Oscilador de Relajacion Con UJTДокумент3 страницыOscilador de Relajacion Con UJTWilliam RamirezОценок пока нет
- El TRIACДокумент9 страницEl TRIACTrafu LarОценок пока нет
- Ilovepdf MergedДокумент17 страницIlovepdf MergedAnthonyОценок пока нет
- Informe Del SemáforoДокумент14 страницInforme Del SemáforoJair Fernando HernandezОценок пока нет
- Contador Binario.Документ8 страницContador Binario.Edson Peralta SalgadoОценок пока нет
- El TRIAC 1Документ16 страницEl TRIAC 1fabian antonyОценок пока нет
- SemaforoTTL PDFДокумент8 страницSemaforoTTL PDFNelson HuataОценок пока нет
- Onduladores T13Документ13 страницOnduladores T13Malco BaldovinoОценок пока нет
- 25.ejercicios de RepasoДокумент10 страниц25.ejercicios de RepasoemersonОценок пока нет
- Trazo Replanteo Curvas Circulares PDFДокумент15 страницTrazo Replanteo Curvas Circulares PDFFrancisco GranadosОценок пока нет
- Informe Previo Nº08 - Circuitos Eléctricos IIДокумент3 страницыInforme Previo Nº08 - Circuitos Eléctricos IIVictor AndresОценок пока нет
- Problema Diseño de Sistemas ElectronicosДокумент2 страницыProblema Diseño de Sistemas ElectronicosDavid SanchezОценок пока нет
- Lab. - 8 - Combinación de Resistencias en ParaleloДокумент15 страницLab. - 8 - Combinación de Resistencias en ParaleloJorge PittyОценок пока нет
- Autoe205 Marzo13 SolДокумент2 страницыAutoe205 Marzo13 SolElena VОценок пока нет
- Lab 3 Cto RC Paralelo Circuitos IIДокумент7 страницLab 3 Cto RC Paralelo Circuitos IIJirusCodinОценок пока нет
- Problemas resueltos de Hidráulica de CanalesОт EverandProblemas resueltos de Hidráulica de CanalesРейтинг: 4.5 из 5 звезд4.5/5 (7)
- Ejercicios DinamicaДокумент12 страницEjercicios DinamicaJavier Chiliquinga50% (2)
- Motor WankelДокумент8 страницMotor WankelScii BelmarОценок пока нет
- Motor, Especificaciones L 150 Par de ApreteДокумент11 страницMotor, Especificaciones L 150 Par de ApreteOscar LoyolaОценок пока нет
- Reporte de Ciguellal AsdfasdsaДокумент15 страницReporte de Ciguellal AsdfasdsaEduardo GuzmanОценок пока нет
- Inspección Pre-Operacional Vibrocompactador CanguroДокумент1 страницаInspección Pre-Operacional Vibrocompactador CanguroJuan David GAVIRIA RUIZ100% (1)
- Válvulas Hidráulicas de Los Circuitos de Sistemas Hidráulicos de Maquinaria PesadaДокумент16 страницVálvulas Hidráulicas de Los Circuitos de Sistemas Hidráulicos de Maquinaria PesadaCarlos CTОценок пока нет
- Prensa en CДокумент7 страницPrensa en CJhon Miranda VelasquezОценок пока нет
- Marco TeoricoДокумент7 страницMarco TeoricoJulio LojanoОценок пока нет
- Regulación de Valvulas Lovol 3,4,6.en - Es.en - EsДокумент3 страницыRegulación de Valvulas Lovol 3,4,6.en - Es.en - EsDaniel Alejandro DelgadoОценок пока нет
- Embrage y Frenos 1Документ6 страницEmbrage y Frenos 1CesarОценок пока нет
- F.T. Wacker Neuson 6001 PDFДокумент339 страницF.T. Wacker Neuson 6001 PDFFerney Lara100% (1)
- Ciclos de Trabago Codigos GДокумент18 страницCiclos de Trabago Codigos GDaniel GalarzaОценок пока нет
- Seat Leon Bxe 2006 Caja SBДокумент9 страницSeat Leon Bxe 2006 Caja SBZyrus Hedphelym Kaothic100% (1)
- La Propulsión Es Una Parte Importante No Solamente para El Lanzamiento de Naves EspacialesДокумент6 страницLa Propulsión Es Una Parte Importante No Solamente para El Lanzamiento de Naves EspacialesMerlysОценок пока нет
- Control de Motores ElectricosДокумент4 страницыControl de Motores ElectricosCristian LandaverdeОценок пока нет
- Transmision Por CadenasДокумент46 страницTransmision Por CadenasMarcos Gajardo100% (2)
- Manual de Taller Hyundai Santa Fe 2.0 - 2.2 Diesel (2013-2018) EspañolДокумент1 300 страницManual de Taller Hyundai Santa Fe 2.0 - 2.2 Diesel (2013-2018) EspañolJose Manuel Quinsacara85% (55)
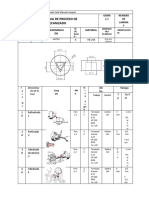
- Hoja de Proceso MДокумент2 страницыHoja de Proceso MMARCELO JOAQUIN MACHICADO SOLIZОценок пока нет
- Modulo Tren de Potencia D11TДокумент46 страницModulo Tren de Potencia D11TAndrésMoisésRodriguezSuarez100% (1)
- Fendt 300 Vario Documento de Formacion PDFДокумент832 страницыFendt 300 Vario Documento de Formacion PDFrafa100% (1)
- BulonДокумент1 страницаBulonHectorОценок пока нет
- Fan CoilДокумент5 страницFan CoilAntonio FormicaОценок пока нет
- Desmontaje Del Motor de Arranque Del Motor Del AutomóvilДокумент34 страницыDesmontaje Del Motor de Arranque Del Motor Del AutomóvilSebastian Gutierrez100% (1)
- Bombas ArielДокумент14 страницBombas ArielMariela Condori RamirezОценок пока нет
- Ventilacion Parte 2 CarronДокумент19 страницVentilacion Parte 2 Carronjose ramirezОценок пока нет
- Wuolah-Free-Solución 1º Parcial Maquinas Fluidos IQ Test 17-18 PDFДокумент6 страницWuolah-Free-Solución 1º Parcial Maquinas Fluidos IQ Test 17-18 PDFJorge SalvadorОценок пока нет
- Excavadores Operadores 14Документ44 страницыExcavadores Operadores 14Comer100% (1)
- Tal PHP G 002Документ22 страницыTal PHP G 002Cesar Ricardo Lopez ValerioОценок пока нет
- Mecanismos de Transformación Del Movimiento MovilesДокумент13 страницMecanismos de Transformación Del Movimiento Movilesjuanyepez100% (1)
- Cotizaciones FerretetriДокумент112 страницCotizaciones FerretetriAldair Claros SalazarОценок пока нет