Вам также может понравиться
- Carla González Uzcátegui and Dolores Blanco RojasДокумент14 страницCarla González Uzcátegui and Dolores Blanco RojasFiandjafarОценок пока нет
- Carla González Uzcátegui and Dolores Blanco RojasДокумент14 страницCarla González Uzcátegui and Dolores Blanco RojasFiandjafarОценок пока нет
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (894)
- MekatroДокумент1 страницаMekatroFiandjafarОценок пока нет
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- MekatronikaДокумент6 страницMekatronikaFiandjafarОценок пока нет
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
- United States Patent 19: Fouchey, Jr. 11) 4,264,082Документ6 страницUnited States Patent 19: Fouchey, Jr. 11) 4,264,082FiandjafarОценок пока нет
- Latihan Simulasi TrussДокумент12 страницLatihan Simulasi TrussFiandjafarОценок пока нет
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- Contoh JurnalДокумент11 страницContoh JurnalFiandjafarОценок пока нет
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Ebubekir Avci, Chanh-Nghiem Nguyen, Kenichi Ohara, Yasushi Mae and Tatsuo AraiДокумент8 страницEbubekir Avci, Chanh-Nghiem Nguyen, Kenichi Ohara, Yasushi Mae and Tatsuo AraiFiandjafarОценок пока нет
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- Mahmood I 2015Документ14 страницMahmood I 2015FiandjafarОценок пока нет
- Jurnal Teknik Mesin Institut Teknologi Padang: Tulis Judul Artikel Di SiniДокумент4 страницыJurnal Teknik Mesin Institut Teknologi Padang: Tulis Judul Artikel Di SiniFiandjafarОценок пока нет
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Water Surface Cleaning RobotДокумент12 страницWater Surface Cleaning RobotFiandjafarОценок пока нет
- SkripsiДокумент49 страницSkripsiFiandjafarОценок пока нет
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Contoh PaperДокумент12 страницContoh PaperFiandjafarОценок пока нет
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- Qiang Li : Rotary Object Dexterous Manipulation in Hand: A Feedback-Based MethodДокумент12 страницQiang Li : Rotary Object Dexterous Manipulation in Hand: A Feedback-Based MethodFiandjafarОценок пока нет
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2219)
- Social Robots and Teaching Music To Auti PDFДокумент10 страницSocial Robots and Teaching Music To Auti PDFFiandjafarОценок пока нет
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- Tang2013 PDFДокумент9 страницTang2013 PDFFiandjafarОценок пока нет
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- Dimensional Synthesis of Six-Bar Stephenson III Mechanism For 12 Precision Points Path GenerationДокумент11 страницDimensional Synthesis of Six-Bar Stephenson III Mechanism For 12 Precision Points Path GenerationFiandjafarОценок пока нет
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (265)
- Dry Block Heater PDFДокумент2 страницыDry Block Heater PDFFiandjafarОценок пока нет
- Qiang Li : Rotary Object Dexterous Manipulation in Hand: A Feedback-Based MethodДокумент12 страницQiang Li : Rotary Object Dexterous Manipulation in Hand: A Feedback-Based MethodFiandjafarОценок пока нет
- Tuning Material and Component Properties To Redu 2015 Case Studies in MechanДокумент10 страницTuning Material and Component Properties To Redu 2015 Case Studies in MechanFiandjafarОценок пока нет
- United States Design Patent (10) Patent No .:: SalgslessДокумент7 страницUnited States Design Patent (10) Patent No .:: SalgslessFiandjafarОценок пока нет
- Nam Dar 2013Документ10 страницNam Dar 2013FiandjafarОценок пока нет
- Editorial Board 2016 Case Studies in Mechanical Systems and Signal ProcessinДокумент1 страницаEditorial Board 2016 Case Studies in Mechanical Systems and Signal ProcessinFiandjafarОценок пока нет
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- Mechanically Automated Light Weight Wastage Remover (Malwware)Документ7 страницMechanically Automated Light Weight Wastage Remover (Malwware)FiandjafarОценок пока нет
- Numerical Investigation of Linear Particl 2016 Case Studies in Mechanical SyДокумент7 страницNumerical Investigation of Linear Particl 2016 Case Studies in Mechanical SyFiandjafarОценок пока нет
- A Comparative Study of Adaptive Filters in de 2016 Case Studies in MechanicaДокумент8 страницA Comparative Study of Adaptive Filters in de 2016 Case Studies in MechanicaFiandjafarОценок пока нет
- Design Simulation and Comparison of Co 2016 Case Studies in Mechanical SystДокумент13 страницDesign Simulation and Comparison of Co 2016 Case Studies in Mechanical SystFiandjafarОценок пока нет
- Enrico Canuto, Wilber Acuña-Bravo and Carlos Perez MontenegroДокумент16 страницEnrico Canuto, Wilber Acuña-Bravo and Carlos Perez MontenegroFiandjafarОценок пока нет
- Content List 2016 Case Studies in Mechanical Systems and Signal ProcessingДокумент1 страницаContent List 2016 Case Studies in Mechanical Systems and Signal ProcessingFiandjafarОценок пока нет
- Gears Spur Agma SI v0Документ5 страницGears Spur Agma SI v0PuBg PrOОценок пока нет
- Cosmet Presentation2Документ62 страницыCosmet Presentation2taghdirimОценок пока нет
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (119)
- Machine Tool Gearbox Design.Документ9 страницMachine Tool Gearbox Design.Mohamed Osama67% (3)
- 13481981Документ17 страниц13481981Anonymous xFV7bg7Q100% (1)
- Bongiglioli - Manual A - enДокумент54 страницыBongiglioli - Manual A - enRifatAlAhmedОценок пока нет
- Globe PRICE BOOK US Mar2011Документ66 страницGlobe PRICE BOOK US Mar2011Kevin SwotekОценок пока нет
- AT6602 QB PDFДокумент11 страницAT6602 QB PDFKarthickОценок пока нет
- Llave de Varillas de BombeoДокумент28 страницLlave de Varillas de BombeoGianna Frola100% (1)
- Company Profile: Material HandlingДокумент28 страницCompany Profile: Material HandlingMA TotalforkliftОценок пока нет
- Gear DesignДокумент83 страницыGear DesignmuhammadaminjamalmutОценок пока нет
- Quick Start Guide Gear Drive Flo Tap Annubar Installation Instructions Rosemount en 77370Документ26 страницQuick Start Guide Gear Drive Flo Tap Annubar Installation Instructions Rosemount en 77370homesxxxОценок пока нет
- Dynamic Characteristics of Epicyclic Gear SystemДокумент77 страницDynamic Characteristics of Epicyclic Gear Systemkaajemaina195Оценок пока нет
- IVOPROP In-Flight Adjustable Pitch SystemДокумент5 страницIVOPROP In-Flight Adjustable Pitch SystemBen FriskneyОценок пока нет
- Actuator Torque CalДокумент19 страницActuator Torque CalKedar Patwardhan100% (1)
- 2006 Ford GTДокумент22 страницы2006 Ford GTsharky67Оценок пока нет
- Automatic Transaxle Repair Manual Section TermsДокумент132 страницыAutomatic Transaxle Repair Manual Section TermsRoman Filatov83% (6)
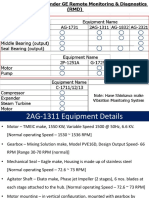
- Equipments Details - For Asset Monitoring Under RMDДокумент28 страницEquipments Details - For Asset Monitoring Under RMDhapp_dentОценок пока нет
- Tool & Cutter GrinderДокумент64 страницыTool & Cutter GrinderAFIFAHZABIDI ZABIDIОценок пока нет
- Gear Pump: Gear Pumps Which Use An External and An InternalДокумент4 страницыGear Pump: Gear Pumps Which Use An External and An InternalalphadingОценок пока нет
- Fluid Power Technology by Ram SrivatsaДокумент194 страницыFluid Power Technology by Ram SrivatsaPuja Ningrat WibowoОценок пока нет
- CRANEДокумент3 страницыCRANETuhin Handa100% (1)
- Starter AssemblyДокумент5 страницStarter AssemblyCoconutFruitGamerОценок пока нет
- Catalogue Đ NG CơДокумент108 страницCatalogue Đ NG CơĐừng Ngoảnh LạiОценок пока нет
- Lubritech Range BrochureДокумент18 страницLubritech Range BrochurecakhokheОценок пока нет
- Handbook of Mechanical Engineering TermsДокумент366 страницHandbook of Mechanical Engineering Termsjakejohns95% (44)
- TM415TRE.491-EnG Programming Mapp Axis V2002Документ52 страницыTM415TRE.491-EnG Programming Mapp Axis V2002Bhavesh BharambeОценок пока нет
- Kluber Centoplex GL 500 PDFДокумент1 страницаKluber Centoplex GL 500 PDFJorgeAndrésOrtegaBerríosОценок пока нет
- Am Series Air Motors: Operation and Maintenance ManualДокумент8 страницAm Series Air Motors: Operation and Maintenance ManualSuat Yiğit SayılıОценок пока нет
- Product Information: Model 1275ac Top DriveДокумент4 страницыProduct Information: Model 1275ac Top DriveERICKОценок пока нет
- Microsoft Word - Solar - Car - Project PDFДокумент10 страницMicrosoft Word - Solar - Car - Project PDFdebashish patra0% (1)
- Mastering Autodesk Inventor 2014 and Autodesk Inventor LT 2014: Autodesk Official PressОт EverandMastering Autodesk Inventor 2014 and Autodesk Inventor LT 2014: Autodesk Official PressРейтинг: 5 из 5 звезд5/5 (1)
- Autodesk Fusion 360: A Power Guide for Beginners and Intermediate Users (3rd Edition)От EverandAutodesk Fusion 360: A Power Guide for Beginners and Intermediate Users (3rd Edition)Рейтинг: 5 из 5 звезд5/5 (2)