Вам также может понравиться
- ESTUDOS (Anm, Valvulas, Etc.)Документ17 страницESTUDOS (Anm, Valvulas, Etc.)Palmério CarvalhoОценок пока нет
- Controle linear de sistemas contínuos no tempoДокумент240 страницControle linear de sistemas contínuos no tempoAlexandre Menezes CamargoОценок пока нет
- Apostila de Controle Linear IДокумент240 страницApostila de Controle Linear Ijam_pa2008Оценок пока нет
- Apostila de Controle Linear IДокумент240 страницApostila de Controle Linear IWeslin SavarisОценок пока нет
- Introdução à Modelagem de Sistemas DinâmicosДокумент54 страницыIntrodução à Modelagem de Sistemas DinâmicosponciovrОценок пока нет
- Sistemas de Controle 1Документ38 страницSistemas de Controle 1Gustavo BLimaОценок пока нет
- Controle Processos Teoria Domínio TemporalДокумент21 страницаControle Processos Teoria Domínio TemporalPablo Villas BoasОценок пока нет
- Instrumentação e Controle Industrial - ICIДокумент8 страницInstrumentação e Controle Industrial - ICIMatheus IsoldiОценок пока нет
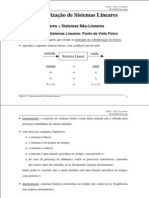
- Unidade III - Modelagem de Sistemas FísicosДокумент16 страницUnidade III - Modelagem de Sistemas FísicosRafael SousaОценок пока нет
- Controle - Tópico 3Документ12 страницControle - Tópico 3kjonathas95Оценок пока нет
- AULA CPДокумент51 страницаAULA CPLuís SalvadorОценок пока нет
- Sistemas Lineares: Modelagem em Espaço de EstadoДокумент40 страницSistemas Lineares: Modelagem em Espaço de Estadoluis_sergio_barrosОценок пока нет
- Aula1 INTRODUCAOДокумент42 страницыAula1 INTRODUCAOLeticia de Assis BrazОценок пока нет
- Controle de sistemas dinâmicosДокумент127 страницControle de sistemas dinâmicosCicero E Cris De LucaОценок пока нет
- Modelagem e Análise de Sistemas DinâmicosДокумент113 страницModelagem e Análise de Sistemas DinâmicosJoel AlvesОценок пока нет
- 07 Sistemas Controle Sistemas Segunda Ordem Ilang 20180406181612Документ50 страниц07 Sistemas Controle Sistemas Segunda Ordem Ilang 20180406181612André MusselОценок пока нет
- Controle ServomecanismoДокумент7 страницControle ServomecanismoMichellThompsonMataОценок пока нет
- Curso de Engenharia ElétricaДокумент37 страницCurso de Engenharia ElétricaVisitanteОценок пока нет
- p1 Controle AulasДокумент135 страницp1 Controle AulasjoaoreniОценок пока нет
- Bizu de Sistemas LinearesДокумент7 страницBizu de Sistemas LinearesD03925Оценок пока нет
- Introdução aos sistemas de controleДокумент39 страницIntrodução aos sistemas de controleJoão Fernando Martins100% (1)
- Sistemas de Controle: Revisão Histórica, Conceitos e DefiniçõesДокумент9 страницSistemas de Controle: Revisão Histórica, Conceitos e DefiniçõesCleber RodriguesОценок пока нет
- Aula Análise Sistemas p1Документ110 страницAula Análise Sistemas p1Leticia de Assis BrazОценок пока нет
- Trabalho2 (Final)Документ33 страницыTrabalho2 (Final)Haroldo FilhoОценок пока нет
- Slides ControleДокумент70 страницSlides ControleÍcaro VianaОценок пока нет
- AT4 - Resposta Dinâmica Dos Sistemas Lineares (Cont)Документ15 страницAT4 - Resposta Dinâmica Dos Sistemas Lineares (Cont)MonizОценок пока нет
- Identificação e controle adaptativoДокумент66 страницIdentificação e controle adaptativogiba1972Оценок пока нет
- Aula Análise SistemasДокумент157 страницAula Análise SistemasLeticia de Assis BrazОценок пока нет
- Aula 04 - Resposta TemporalДокумент57 страницAula 04 - Resposta Temporalbersilveira8645Оценок пока нет
- Análise de Sistemas Dinâmicos: Pêndulo SimplesДокумент27 страницAnálise de Sistemas Dinâmicos: Pêndulo SimplesricardosponchiadoОценок пока нет
- Função de transferência e análise de sistemas dinâmicosДокумент86 страницFunção de transferência e análise de sistemas dinâmicoswemersonrferreiraОценок пока нет
- Modelos Poster - IEBДокумент1 страницаModelos Poster - IEBBianca Carvalho MartinsОценок пока нет
- Cap1 NiseДокумент43 страницыCap1 NiseHélio Oliveira FerrariОценок пока нет
- Aula 1 Sis Ctle 2022 2SДокумент60 страницAula 1 Sis Ctle 2022 2SBejamin AndersonОценок пока нет
- Aula 09 - PCC - Fundamentos de COntroleДокумент44 страницыAula 09 - PCC - Fundamentos de COntrolethaysОценок пока нет
- Aula 3Документ51 страницаAula 3Gabriel ModestoОценок пока нет
- Análise de Sistemas LinearesДокумент87 страницAnálise de Sistemas LinearesThyago FerreiraОценок пока нет
- Controle SistemasДокумент29 страницControle SistemasNey Jr.Оценок пока нет
- Resposta Dinâmica de Sistemas Lineares Controle Essencial Capítulo 6Документ33 страницыResposta Dinâmica de Sistemas Lineares Controle Essencial Capítulo 6Hamilton NettoОценок пока нет
- 5 Aula Sistemas Lit 2018.1Документ25 страниц5 Aula Sistemas Lit 2018.1alex.bezerraОценок пока нет
- 6 Aula5-Solucao Lineares-Rev1Документ42 страницы6 Aula5-Solucao Lineares-Rev1Caio NegrãoОценок пока нет
- Histórico da Teoria de Controle emДокумент17 страницHistórico da Teoria de Controle emPolo SemedoОценок пока нет
- 02 DuffingДокумент4 страницы02 DuffinghenryllecllishОценок пока нет
- 00 Aulas - Sistemas de Controle Moderno - 00Документ130 страниц00 Aulas - Sistemas de Controle Moderno - 00ealvesОценок пока нет
- Aula 05 - Modelos de sistemas físicos e função de transferênciaДокумент19 страницAula 05 - Modelos de sistemas físicos e função de transferênciaFranciele GomesОценок пока нет
- Mecatrônica: Teoria de ControleДокумент46 страницMecatrônica: Teoria de ControleBelo traderОценок пока нет
- Aula 2 - ANAL - sist.LINEARES - Classificação de Sistemas - Malha Aberta e Malha FechadaДокумент48 страницAula 2 - ANAL - sist.LINEARES - Classificação de Sistemas - Malha Aberta e Malha FechadaMikael PaivaОценок пока нет
- EMA184 Fundamentos Da Teoria de Controle PDFДокумент2 страницыEMA184 Fundamentos Da Teoria de Controle PDFRafael EscobarОценок пока нет
- Análise temporal de sistemas de controlo contínuosДокумент11 страницAnálise temporal de sistemas de controlo contínuosRedação PaxОценок пока нет
- Introdução à realimentação em sistemas de controleДокумент43 страницыIntrodução à realimentação em sistemas de controleEric CerqueiraОценок пока нет
- 1 - Introdução A Teoria de Controle e Representação GráficaДокумент25 страниц1 - Introdução A Teoria de Controle e Representação GráficaMayko Douglas DantasОценок пока нет
- Controle de Processos Químicos: Estabilidade de Sistemas de Controle Routh-HurwitzДокумент28 страницControle de Processos Químicos: Estabilidade de Sistemas de Controle Routh-HurwitzGnu_saraОценок пока нет
- Representação de sistemas lineares no espaço de estadosДокумент51 страницаRepresentação de sistemas lineares no espaço de estadosSaimon BoeingОценок пока нет
- Rel Controle FTДокумент30 страницRel Controle FTprotocolopm12020Оценок пока нет
- Controle DigitalОт EverandControle DigitalОценок пока нет
- 07 Sistemas Controle Sistemas Segunda Ordem Ilang 20180406181612Документ50 страниц07 Sistemas Controle Sistemas Segunda Ordem Ilang 20180406181612André MusselОценок пока нет
- A Energia Do Lixo - BarbacenaДокумент6 страницA Energia Do Lixo - BarbacenaLincoln PaulicheiОценок пока нет
- Manual Aproveitamento Biogas AterrosДокумент80 страницManual Aproveitamento Biogas AterrosANDI Agencia de Noticias do Direito da InfanciaОценок пока нет
- Exercicios Resolvidos de CIV 107Документ86 страницExercicios Resolvidos de CIV 107Samuel FonsecaОценок пока нет
- Aula3 Parametroslinha Vr2 20170912231602Документ36 страницAula3 Parametroslinha Vr2 20170912231602André MusselОценок пока нет
- Estatística Lixo BHДокумент2 страницыEstatística Lixo BHAndré MusselОценок пока нет
- Introduoaodiodo 20180225233425Документ16 страницIntroduoaodiodo 20180225233425André MusselОценок пока нет
- Prova 55 - Técnico (A) de Segurança JúniorДокумент13 страницProva 55 - Técnico (A) de Segurança JúniorPatrick Souza QueresОценок пока нет
- SiteДокумент1 страницаSiteAndré MusselОценок пока нет
- Ergonomia - Uma Visão SistemicaДокумент22 страницыErgonomia - Uma Visão SistemicaRhumanosОценок пока нет
- Ergonomia - Uma Visão SistemicaДокумент22 страницыErgonomia - Uma Visão SistemicaRhumanosОценок пока нет
- Geometria Analítica Espacial - ApostilaДокумент45 страницGeometria Analítica Espacial - ApostilasocramsilvaОценок пока нет
- Conjuntos Numéricos - Eixo VДокумент3 страницыConjuntos Numéricos - Eixo Valexandre lima dos santosОценок пока нет
- Semana 07ap GabДокумент5 страницSemana 07ap GabMateus S Y KikumoriОценок пока нет
- Funções: composição, inversa e par/ímparДокумент26 страницFunções: composição, inversa e par/ímparJosé AlmeidaОценок пока нет
- Binômio de Newton - Teoria e aplicaçõesДокумент15 страницBinômio de Newton - Teoria e aplicaçõesLucas Pereira CavalcantiОценок пока нет
- Derivação de funções matemáticasДокумент19 страницDerivação de funções matemáticasSilva AndreyОценок пока нет
- Funçao AfimДокумент4 страницыFunçao AfimIsrael Miguel CostaОценок пока нет
- ElipseДокумент10 страницElipsevinicyuspazОценок пока нет
- AM I Teste 2V3-1Документ3 страницыAM I Teste 2V3-1Mundo CuriosoОценок пока нет
- Funções matemáticas para engenhariaДокумент21 страницаFunções matemáticas para engenhariaFranklin SantosОценок пока нет
- Prova modelo de matemática com resolução de exercíciosДокумент6 страницProva modelo de matemática com resolução de exercíciosduraorute1793Оценок пока нет
- Funções - 9ºanoДокумент2 страницыFunções - 9ºanoInês Ferreira Dias100% (1)
- Polinômios: Expressões Algébricas com Várias IncógnitasДокумент69 страницPolinômios: Expressões Algébricas com Várias IncógnitasManuel Manso de AvelarОценок пока нет
- Equações Diferenciais Exercício 24Документ4 страницыEquações Diferenciais Exercício 24Bruno TeixeiraОценок пока нет
- Transformada Z: Definição e Região de ConvergênciaДокумент22 страницыTransformada Z: Definição e Região de ConvergênciaAndré Toga Machado CoelhoОценок пока нет
- Equacoes Diferenciais 1 PDFДокумент2 страницыEquacoes Diferenciais 1 PDFNatalia AlmeidaОценок пока нет
- Problemas de Valor Inicial ResumidoДокумент5 страницProblemas de Valor Inicial ResumidoDjScratch OmOnStRoОценок пока нет
- Exercícios de matemática - números complexosДокумент7 страницExercícios de matemática - números complexosLetícia Aline RossiОценок пока нет
- Ficha-2 Complementar-Investigacao OperacionalДокумент16 страницFicha-2 Complementar-Investigacao OperacionalZabibo AbdalaОценок пока нет
- Processamento Digital de Sinal PDFДокумент105 страницProcessamento Digital de Sinal PDFromenegon0% (1)
- Números ComplexosДокумент18 страницNúmeros ComplexosLucas RibeiroОценок пока нет
- Cálculo de limites matemáticosДокумент2 страницыCálculo de limites matemáticosGuilherme LeardiniОценок пока нет
- Poligrafo Cálculo I (Parte 3)Документ36 страницPoligrafo Cálculo I (Parte 3)bruno dittbernerОценок пока нет
- EDOs 2 Ordem - Caso Não HomogêneoДокумент20 страницEDOs 2 Ordem - Caso Não HomogêneovicroОценок пока нет
- Séries de Fourier: funções periódicas e representação por séries trigonométricasДокумент48 страницSéries de Fourier: funções periódicas e representação por séries trigonométricasBeatriz CruzОценок пока нет
- Matemática II Notas do CursoДокумент181 страницаMatemática II Notas do CursoRafael FernandesОценок пока нет
- Testes de Convergencia PDFДокумент30 страницTestes de Convergencia PDFpkmonteiroОценок пока нет
- Função Afim-1Документ13 страницFunção Afim-1Lilas Christiano Ali100% (1)
- Análise VetorialДокумент3 страницыAnálise VetorialRi GomesОценок пока нет
- Método Da FlexibilidadeДокумент15 страницMétodo Da FlexibilidadeRenatinhaNettoОценок пока нет