Вам также может понравиться
- Exercises in Electronics: Operational Amplifier CircuitsОт EverandExercises in Electronics: Operational Amplifier CircuitsРейтинг: 3 из 5 звезд3/5 (1)
- Chapter 5 - Induction MotorДокумент26 страницChapter 5 - Induction MotorarifulОценок пока нет
- ISM To Accompany Electric Machinery and Power System Fundamentals 1 - eДокумент2 страницыISM To Accompany Electric Machinery and Power System Fundamentals 1 - eLia PalmaОценок пока нет
- Slip Power Recovery SchemesДокумент24 страницыSlip Power Recovery SchemesMagudeeswaran MagudeeswaranОценок пока нет
- CH 3 - Induction MotorsДокумент46 страницCH 3 - Induction MotorsMiz AelyfhaОценок пока нет
- Induction Motor PDFДокумент26 страницInduction Motor PDFishak789100% (1)
- KKMNДокумент5 страницKKMNKATY LISBETH MOROCHO GUACHOОценок пока нет
- Electric Machine Ch06Документ12 страницElectric Machine Ch06carlos abreuОценок пока нет
- Three-Phase Induction MachinesДокумент46 страницThree-Phase Induction MachinesWakgari TadesaОценок пока нет
- Intro To AC Drives 1Документ25 страницIntro To AC Drives 1Nur AinaqilahОценок пока нет
- Electrical Machines Technology II-EMT226C-Three Phase Induction Motors-New NotesДокумент63 страницыElectrical Machines Technology II-EMT226C-Three Phase Induction Motors-New NotesTinyiko ChaukeОценок пока нет
- Laboratory Session 8 Squirrel Cage Induction Motor CharacteristicsДокумент15 страницLaboratory Session 8 Squirrel Cage Induction Motor CharacteristicshinsermuОценок пока нет
- Chapter 9 - InductionДокумент11 страницChapter 9 - InductionLin ChongОценок пока нет
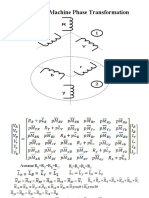
- Induction Machine Phase TransformationДокумент20 страницInduction Machine Phase Transformation7sn omerОценок пока нет
- Elx 311 Chap 7 SlidesДокумент23 страницыElx 311 Chap 7 SlidesDaniyar SeytenovОценок пока нет
- Ganelo, Jethro B. Bautista, Joanna Marie Z. Gaulit, Carlo J. Bsme 3B May 27, 2021Документ16 страницGanelo, Jethro B. Bautista, Joanna Marie Z. Gaulit, Carlo J. Bsme 3B May 27, 2021jethro ganeloОценок пока нет
- Bee Unit4 Lecture2Документ7 страницBee Unit4 Lecture2haiderОценок пока нет
- Chuong 3 - Dieu Khien Toc Do Dong Co KDBДокумент55 страницChuong 3 - Dieu Khien Toc Do Dong Co KDBThiên HảiОценок пока нет
- 17S2 EE3010 PPT Devt Lecture2InductionMotor v2.7Документ18 страниц17S2 EE3010 PPT Devt Lecture2InductionMotor v2.7ming yangОценок пока нет
- High Chopper Frequency Drive of Wound Rotor Induction Motor With A Resistively Loaded Rotor ChopperДокумент5 страницHigh Chopper Frequency Drive of Wound Rotor Induction Motor With A Resistively Loaded Rotor ChopperchandanjuenggОценок пока нет
- 02 Single Phase Im 02Документ8 страниц02 Single Phase Im 02Suleiman Abubakar AuduОценок пока нет
- Chapter 3Документ15 страницChapter 3Moin AshrafОценок пока нет
- Performance Characteristics and Double Revolving Theory of Single Phase Induction MotorДокумент12 страницPerformance Characteristics and Double Revolving Theory of Single Phase Induction MotorAravind KumarОценок пока нет
- Induction Motor 2003Документ24 страницыInduction Motor 2003hdrzaman9439Оценок пока нет
- 7 - Lecture - Induction MotorsДокумент41 страница7 - Lecture - Induction MotorspaurushgodharОценок пока нет
- Induction MotorДокумент39 страницInduction MotorAhmed MagdyОценок пока нет
- A.C. Induction Motors: Construction of 3-Phase Induction MotorДокумент8 страницA.C. Induction Motors: Construction of 3-Phase Induction MotorQasimОценок пока нет
- 5.4 Rotor E.M.F and Frequency: Example 5.1: The Stator of A 3-Phase, 4-Pole Induction Motor IsДокумент6 страниц5.4 Rotor E.M.F and Frequency: Example 5.1: The Stator of A 3-Phase, 4-Pole Induction Motor IsJOHN MINKHANTОценок пока нет
- Induction Motors PDFДокумент108 страницInduction Motors PDFKshitij ShrivastavaОценок пока нет
- Kramer DriveДокумент42 страницыKramer DriveSenthil Kumar100% (1)
- 7 Induction Motor BasicsДокумент51 страница7 Induction Motor BasicsFos AlharbiОценок пока нет
- Soal UTS 2017Документ6 страницSoal UTS 2017Kukuh WidarsonoОценок пока нет
- To Calculate The Torque Generated by Any Arbitrary Three-Phase Motor, While Considering Harmonic Torques Too, (If Any)Документ11 страницTo Calculate The Torque Generated by Any Arbitrary Three-Phase Motor, While Considering Harmonic Torques Too, (If Any)Soumya Ranjan NayakОценок пока нет
- ELEC 2032 (3) Electromechanical System: Induction Motor IIIДокумент19 страницELEC 2032 (3) Electromechanical System: Induction Motor IIIAshvin AshОценок пока нет
- Asynchronous MachinesДокумент34 страницыAsynchronous MachinesAndi FalihОценок пока нет
- Chapter 6B - IMДокумент31 страницаChapter 6B - IMNour Ziad Ibrahim AlkurdiОценок пока нет
- Ind MДокумент10 страницInd MJOHN MINKHANTОценок пока нет
- Induction Machine Chapter No 7Документ57 страницInduction Machine Chapter No 7bhaktameltОценок пока нет
- Induction Motor Modeling - Steady StateДокумент43 страницыInduction Motor Modeling - Steady Statedivinelight100% (3)
- Induction Motors 2 2020Документ15 страницInduction Motors 2 2020Jonathan ArturoОценок пока нет
- Induction Machines: Principle of Operation and Equivalent Circuit ModelДокумент15 страницInduction Machines: Principle of Operation and Equivalent Circuit ModelRyan BenjaminОценок пока нет
- Polyphase Induction Machines: Principle of OperationДокумент10 страницPolyphase Induction Machines: Principle of OperationPrakash KumarОценок пока нет
- InductionMotors Gate Material PartBДокумент38 страницInductionMotors Gate Material PartBpraveen6494Оценок пока нет
- Asynchronous Machines: Stator: Magnetic Circuit and PolyphasedДокумент13 страницAsynchronous Machines: Stator: Magnetic Circuit and PolyphasedsimbarasheОценок пока нет
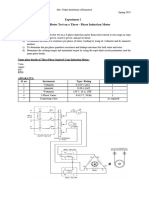
- Exp-2 - Blocked-Rotor Test On A Three-Phase IMДокумент3 страницыExp-2 - Blocked-Rotor Test On A Three-Phase IMMudit BhatiaОценок пока нет
- Induction GeneratorДокумент61 страницаInduction Generatorayash mohantyОценок пока нет
- Induction MotorДокумент39 страницInduction MotorSaneer M SaliОценок пока нет
- 6-Kontrol Generator SinkronДокумент56 страниц6-Kontrol Generator SinkronMuhamad Risqi AbdullohОценок пока нет
- TOR CRENT EMF - 66cea157a5cd594a8288b820Документ12 страницTOR CRENT EMF - 66cea157a5cd594a8288b820Harnam Singh DhillonОценок пока нет
- Lecture Note - ED - Speed Control of IMДокумент5 страницLecture Note - ED - Speed Control of IMsashaikhОценок пока нет
- Speed Control of 3 Phase Induction Motor 1 Aim: Experiment No: 3Документ10 страницSpeed Control of 3 Phase Induction Motor 1 Aim: Experiment No: 3rohitkjОценок пока нет
- Three-Phase Induction MotorДокумент17 страницThree-Phase Induction MotorAdarsh AdarshОценок пока нет
- Elec 4 Synchronous Genrators PPT 2Документ37 страницElec 4 Synchronous Genrators PPT 2Jamir CalОценок пока нет
- Induction Motors: The Concept of Rotor SlipДокумент12 страницInduction Motors: The Concept of Rotor Sliphafiz_jaaffarОценок пока нет
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2От EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Оценок пока нет
- Advanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkОт EverandAdvanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkОценок пока нет
- Fundamentals of Electronics 1: Electronic Components and Elementary FunctionsОт EverandFundamentals of Electronics 1: Electronic Components and Elementary FunctionsОценок пока нет
- Node Analysis & Graph Theory PDFДокумент59 страницNode Analysis & Graph Theory PDFpurushg62Оценок пока нет
- Network Analysis VTU NotesДокумент47 страницNetwork Analysis VTU NotesSagar S Poojary50% (2)
- IV Eee I Sem Es LabДокумент61 страницаIV Eee I Sem Es LabEkansh DwivediОценок пока нет
- Unit-I Circuit BreakersДокумент13 страницUnit-I Circuit Breakerspurushg62Оценок пока нет
- Uee Unit-4Документ9 страницUee Unit-4China KotikalapudiОценок пока нет
- Electrical Engg 2015Документ30 страницElectrical Engg 2015Srimannarayana NandamОценок пока нет
- Subject: Modern Control Theory: Advantage of State VariablesДокумент13 страницSubject: Modern Control Theory: Advantage of State Variablespurushg62Оценок пока нет
- Uee I PDFДокумент28 страницUee I PDFpurushg62Оценок пока нет
- First Order CircuitsДокумент18 страницFirst Order CircuitsJean Carlos ZabaletaОценок пока нет
- Work TheoryДокумент258 страницWork TheoryP Venu Gopala RaoОценок пока нет
- Eee3055f Notes.2012 V36Документ230 страницEee3055f Notes.2012 V36hmalrizzo469Оценок пока нет
- Ma Eco Pre Pap3 bl2Документ29 страницMa Eco Pre Pap3 bl2purushg62Оценок пока нет
- Source-Free DD RLC CircuitДокумент13 страницSource-Free DD RLC CircuitShiva Kumar PottabathulaОценок пока нет
- Network AnalysisДокумент15 страницNetwork Analysispurushg62Оценок пока нет
- 13A04101 Network Analysis JNTUA Regular Examinations 2014Документ2 страницы13A04101 Network Analysis JNTUA Regular Examinations 2014purushg62Оценок пока нет
- EMF MethodДокумент5 страницEMF Methodpurushg62Оценок пока нет
- DC G ObjДокумент3 страницыDC G Objpurushg62Оценок пока нет
- Millman MethodДокумент1 страницаMillman Methodpurushg62Оценок пока нет
- Power SystemДокумент3 страницыPower Systempurushg62Оценок пока нет
- Phasor DiagramsДокумент3 страницыPhasor Diagramspurushg62100% (1)
- EE304 20140808 GRPH Thry-LibreДокумент7 страницEE304 20140808 GRPH Thry-Librepurushg62Оценок пока нет
- Question 2: DEP-A & DEP-B Loads: Electrical SystemДокумент15 страницQuestion 2: DEP-A & DEP-B Loads: Electrical SystemJorge LuisОценок пока нет
- 30 Days Challenge For Electrical Engineeirng: Pantech SolutionsДокумент11 страниц30 Days Challenge For Electrical Engineeirng: Pantech SolutionsPerenpanathan Suganthan100% (1)
- Lab #3: Advanced Assembly Programming & Adding SRAMДокумент2 страницыLab #3: Advanced Assembly Programming & Adding SRAMRosemond FabienОценок пока нет
- Windjammer and Nautialir Blowers Catalog PDFДокумент136 страницWindjammer and Nautialir Blowers Catalog PDFrtgeorgeОценок пока нет
- Bellofram T2000 IP Transducer ImДокумент6 страницBellofram T2000 IP Transducer ImelyuyaОценок пока нет
- SmartfusionДокумент40 страницSmartfusiongimen100% (5)
- NetactsfgДокумент44 страницыNetactsfgcharanteja100% (1)
- Yagi Uda AntennaДокумент8 страницYagi Uda AntennaSiva UthirapathiОценок пока нет
- SPCD3C2Документ15 страницSPCD3C2ARA CESPEDES JORGEОценок пока нет
- 11072914337094Документ29 страниц11072914337094iskenderbeyОценок пока нет
- BC556, B BC557, A, B, C BC558, B: MccsemiДокумент5 страницBC556, B BC557, A, B, C BC558, B: MccsemiRogerio Morais Do NascimentoОценок пока нет
- Operation and Installation: Residential/Commercial Generator SetsДокумент52 страницыOperation and Installation: Residential/Commercial Generator SetsStevenОценок пока нет
- SCX2 190BB PDFДокумент2 страницыSCX2 190BB PDFIvan José Campos MadridОценок пока нет
- 3B40ZC5570P1 Fe55av - SpecificationsДокумент21 страница3B40ZC5570P1 Fe55av - SpecificationsThanh BarcaОценок пока нет
- The Quest For Robust Wireless High-Def Video Connections: Voice of The EngineerДокумент56 страницThe Quest For Robust Wireless High-Def Video Connections: Voice of The EngineerJim Redpath100% (2)
- Panasonic LCD HDTV TC-L32X1 TC-L37X1 Chassis LH90 Service ManualДокумент63 страницыPanasonic LCD HDTV TC-L32X1 TC-L37X1 Chassis LH90 Service ManualElectronica Leon Espinoza100% (4)
- HP ATP Server Solutions V2 - PD29287 PDFДокумент312 страницHP ATP Server Solutions V2 - PD29287 PDFDeepakОценок пока нет
- CEAIRДокумент11 страницCEAIRKesavan SujathaОценок пока нет
- GDM 500-650 Juction BoxДокумент2 страницыGDM 500-650 Juction BoxPatron MixОценок пока нет
- Panasonic TX-p42u30e TX-p42ux30e TX-p42u30j TX-pr42u30 TX-pr42u31 Chassis Gpf14d-EДокумент113 страницPanasonic TX-p42u30e TX-p42ux30e TX-p42u30j TX-pr42u30 TX-pr42u31 Chassis Gpf14d-ESorin DanielОценок пока нет
- BMI Kenya Telecommunications Report Q4 2014 - 04115036Документ97 страницBMI Kenya Telecommunications Report Q4 2014 - 04115036eugene123Оценок пока нет
- Ir105 105+ 9070-pc PDFДокумент280 страницIr105 105+ 9070-pc PDFILham Dwi PutraОценок пока нет
- Persistence of Vision PDFДокумент4 страницыPersistence of Vision PDFkaushikmohantyОценок пока нет
- Datasheet PDFДокумент45 страницDatasheet PDFSonidos SotoОценок пока нет
- SL025B User ManualДокумент12 страницSL025B User ManualAntônio Ferreira RosaОценок пока нет
- Drawing Lecture 1Документ28 страницDrawing Lecture 1Real NazihОценок пока нет
- CMOS-MEMS SensorДокумент16 страницCMOS-MEMS SensorFaresОценок пока нет
- Standards Specifications For Instrument CablesДокумент10 страницStandards Specifications For Instrument CablesAmmar AltamimyОценок пока нет
- DEPT. of Computer Science Engineering SRM IST, Kattankulathur - 603 203Документ5 страницDEPT. of Computer Science Engineering SRM IST, Kattankulathur - 603 203nielabh GireyОценок пока нет
- User'S Manual: MODEL: MMA160/200Документ9 страницUser'S Manual: MODEL: MMA160/200Vlaovic GoranОценок пока нет