Вам также может понравиться
- Ecuaciones DiferencialesДокумент2 страницыEcuaciones DiferencialesGemerson Gerald Cano FloresОценок пока нет
- B. Ecuaciones Diferenciales LinealesДокумент12 страницB. Ecuaciones Diferenciales LinealesKevin Toro GonzalezОценок пока нет
- Ecuaciones Dif Lineales de Primer Orden - 2Документ3 страницыEcuaciones Dif Lineales de Primer Orden - 2Rafael GarciaОценок пока нет
- Calculo IIIДокумент8 страницCalculo IIIAARON NILS GUTIERREZ MARQUEZОценок пока нет
- Derivada de La Función ExponencialДокумент2 страницыDerivada de La Función ExponencialCarlos MartinezОценок пока нет
- Método Coeficientes IndeterminadosДокумент6 страницMétodo Coeficientes IndeterminadosMarcya AcostaОценок пока нет
- Taller Global 1.3 Ecuaciones Diferenciales 2021-2Документ2 страницыTaller Global 1.3 Ecuaciones Diferenciales 2021-2Anais GivovichОценок пока нет
- Resumen Semana 7 Calculo Integral Con Ecuaciones Diferenciales 2023 1Документ3 страницыResumen Semana 7 Calculo Integral Con Ecuaciones Diferenciales 2023 1Felipe BernalОценок пока нет
- Semana 4Документ14 страницSemana 4Fatima GuevaraОценок пока нет
- Guía Teórico Practica CalculoДокумент11 страницGuía Teórico Practica CalculoJaime RiquelmeОценок пока нет
- La Delta de DiracДокумент6 страницLa Delta de DiracDiegoОценок пока нет
- 3 Ed - Orden - Superior - 2010 10 25 248Документ17 страниц3 Ed - Orden - Superior - 2010 10 25 248Matias BОценок пока нет
- NOTACIONESДокумент3 страницыNOTACIONESYAHIR30Оценок пока нет
- Ecuaciones Diferenciales2Документ17 страницEcuaciones Diferenciales2Alejo CondoríОценок пока нет
- Entrega 5. Lineal de Primer Orden. BernoulliДокумент8 страницEntrega 5. Lineal de Primer Orden. BernoulliIVAN JIMENEZ ESTUDIANTEОценок пока нет
- 10.función Par e ImparДокумент10 страниц10.función Par e ImparemersonОценок пока нет
- Semana 03 - s1 Edo LinealesДокумент11 страницSemana 03 - s1 Edo LinealesLuen BaxsОценок пока нет
- Ecuacion de Ricati y BernoulliДокумент41 страницаEcuacion de Ricati y BernoulliGerson RojasОценок пока нет
- Cap3 Problema de La BraquistócronaДокумент5 страницCap3 Problema de La BraquistócronafatamariОценок пока нет
- 3.2 Ecuaciones HomogéneasДокумент2 страницы3.2 Ecuaciones Homogéneascarlos rivasОценок пока нет
- Modulo Cálculo Diferencial-Unidad II - CivilДокумент20 страницModulo Cálculo Diferencial-Unidad II - CivilSandy Hernández MalcaОценок пока нет
- Algo Importante Acerca de Las IntegralesДокумент13 страницAlgo Importante Acerca de Las IntegralesJuanОценок пока нет
- Derivadas TracendentalesДокумент5 страницDerivadas TracendentalesJosé María Rodríguez MartínezОценок пока нет
- Derivadas TracendentalesДокумент6 страницDerivadas TracendentalesCheko CiagarОценок пока нет
- Integrales Indefindas y Definidas PDFДокумент43 страницыIntegrales Indefindas y Definidas PDFLenin Eli Flores BalandraОценок пока нет
- Ppt2 Regla de La Cadena-TangenteДокумент16 страницPpt2 Regla de La Cadena-TangenteisaccccОценок пока нет
- CLASE 19 (Recapitulación 4 - Repaso Temas 10 Al 13 2223-1)Документ70 страницCLASE 19 (Recapitulación 4 - Repaso Temas 10 Al 13 2223-1)David VillaltaОценок пока нет
- 2.3. - Ecuaciones Diferenciales LinealesДокумент9 страниц2.3. - Ecuaciones Diferenciales LinealesgreciaОценок пока нет
- Maxelia Otazu QuispeДокумент7 страницMaxelia Otazu QuispeMarcial PeñaОценок пока нет
- S5 Apuntes EDO 3 TresДокумент66 страницS5 Apuntes EDO 3 TresYonatan BartoloОценок пока нет
- Ejercicios Resueltos Calculo IIIДокумент21 страницаEjercicios Resueltos Calculo IIIDiana Estefania Hoffman100% (1)
- Guia10 DerivadaДокумент11 страницGuia10 DerivadaFERNANDO DEMETRIOОценок пока нет
- Ecuaciones DiferencialesДокумент29 страницEcuaciones Diferencialescecyalvarez47Оценок пока нет
- Problemas de Cálculo Diferencial e Integral PDFДокумент526 страницProblemas de Cálculo Diferencial e Integral PDFJorge100% (3)
- Capt 6Документ11 страницCapt 6Anibal Moises Andia TorresОценок пока нет
- Ecuaciones Diferenciales LinealesДокумент2 страницыEcuaciones Diferenciales LinealesGemoyu MoralesОценок пока нет
- 08 Derivadas Laterales-cadena-Orden SuperiorДокумент3 страницы08 Derivadas Laterales-cadena-Orden SuperiorYhoselin Jarumy Lopez MedinaОценок пока нет
- Auxiliar 8Документ2 страницыAuxiliar 8genialb16Оценок пока нет
- IntegralДокумент4 страницыIntegralOscar NovoaОценок пока нет
- 3 Ecuaciones Diferenciales Orden SuperiorДокумент79 страниц3 Ecuaciones Diferenciales Orden SuperiorfiorediazrОценок пока нет
- Secc 2.3 Ecuaciones LinealesДокумент23 страницыSecc 2.3 Ecuaciones Linealesjose2182Оценок пока нет
- Semana 06 - s1 Operadores InversosДокумент17 страницSemana 06 - s1 Operadores InversosJAIME ADAN QUISPE CCALLISAYAОценок пока нет
- Aiii.s3 2018-2Документ12 страницAiii.s3 2018-2Jhoan Pierre RGОценок пока нет
- Derivadas AlgebraicasДокумент13 страницDerivadas AlgebraicasRicardo DiazОценок пока нет
- Semana 06 - S2Документ15 страницSemana 06 - S2Elder Edson Paucar RojasОценок пока нет
- Ecuaciones de Orden SuperiorДокумент38 страницEcuaciones de Orden SuperiorDayana ParedesОценок пока нет
- Tarea 4 ED Ecuaciones Homogeneas y LinealesДокумент19 страницTarea 4 ED Ecuaciones Homogeneas y LinealesAaron RomeroОценок пока нет
- Semana 11 - DerivadasДокумент23 страницыSemana 11 - DerivadasDiego Bravo GrausОценок пока нет
- Semana 06 S2Документ13 страницSemana 06 S2Jean Pierre MoralesОценок пока нет
- Ecuaciones Diferenciales - Actividad 2. AL067Документ14 страницEcuaciones Diferenciales - Actividad 2. AL067Claudi MartinezОценок пока нет
- Sem 5 CTDДокумент5 страницSem 5 CTDPercy Alexy Huirse PumaОценок пока нет
- Resumen ED Orden 1 (2014)Документ3 страницыResumen ED Orden 1 (2014)Carlos FreitasОценок пока нет
- EDO LinealesДокумент10 страницEDO LinealesJennifer Contreras ReyesОценок пока нет
- La ecuación general de segundo grado en dos y tres variablesОт EverandLa ecuación general de segundo grado en dos y tres variablesОценок пока нет
- V 1ros Psicologia Persepcion y SensacionДокумент49 страницV 1ros Psicologia Persepcion y SensacionAlvin YaquitoryОценок пока нет
- DocumentoДокумент11 страницDocumentoAlvin YaquitoryОценок пока нет
- V 1ros Psicologia Persepcion y SensacionДокумент49 страницV 1ros Psicologia Persepcion y SensacionAlvin YaquitoryОценок пока нет
- Para Editar TransporteДокумент1 страницаPara Editar TransporteAlvin YaquitoryОценок пока нет
- DocumentoДокумент11 страницDocumentoAlvin YaquitoryОценок пока нет
- Es Un Término de Psicología Estudiado Por Diversos Expertos en El ÁreaДокумент1 страницаEs Un Término de Psicología Estudiado Por Diversos Expertos en El ÁreaAlvin YaquitoryОценок пока нет
- DocumentoДокумент11 страницDocumentoAlvin YaquitoryОценок пока нет
- DocumentoДокумент11 страницDocumentoAlvin YaquitoryОценок пока нет
- GRAFICAДокумент2 страницыGRAFICAAlvin YaquitoryОценок пока нет
- Refine RiaДокумент3 страницыRefine RiaGabriela ApazaОценок пока нет
- Para Análisis NodalДокумент1 страницаPara Análisis NodalAlvin YaquitoryОценок пока нет
- Po = pressure on packer seal in annulus, psi: ∆ L r F π D dДокумент3 страницыPo = pressure on packer seal in annulus, psi: ∆ L r F π D dAlvin YaquitoryОценок пока нет
- Obtencion Del NitrobecenoДокумент10 страницObtencion Del NitrobecenoAlvin YaquitoryОценок пока нет
- TablaДокумент1 страницаTablaAlvin YaquitoryОценок пока нет
- Teorema de Torricelli (Fluidos)Документ6 страницTeorema de Torricelli (Fluidos)jknight117Оценок пока нет
- Tabla de TransformadaДокумент1 страницаTabla de TransformadaRonald Orellano MОценок пока нет
- Caracterizacion GeoquimicaДокумент60 страницCaracterizacion GeoquimicaAlvin YaquitoryОценок пока нет
- La Violencia Es El Último Recurso Del IncompetenteДокумент2 страницыLa Violencia Es El Último Recurso Del IncompetenteAlvin YaquitoryОценок пока нет
- El Azucar de RemolachaДокумент5 страницEl Azucar de RemolachaAlvin YaquitoryОценок пока нет
- Fluidos IdealesДокумент11 страницFluidos IdealesManuel Mendoza100% (1)
- Qué Significa Ser Una Propiedad AditivaДокумент1 страницаQué Significa Ser Una Propiedad AditivaAlvin YaquitoryОценок пока нет
- Produc Arbol de NavidadДокумент1 страницаProduc Arbol de NavidadAlvin YaquitoryОценок пока нет
- EstroncioДокумент11 страницEstroncioGabriela ApazaОценок пока нет
- Sistema SolarДокумент1 страницаSistema SolarAlvin YaquitoryОценок пока нет
- El Árbol Maldito de Casandra en Gran CanariaДокумент5 страницEl Árbol Maldito de Casandra en Gran CanariaAlvin YaquitoryОценок пока нет
- Energia de La BiomasaДокумент5 страницEnergia de La BiomasaGabriela ApazaОценок пока нет
- Existen Muchos Tipos de Fluidos de PerforaciónДокумент3 страницыExisten Muchos Tipos de Fluidos de PerforaciónAlvin YaquitoryОценок пока нет
- Der ReseДокумент1 страницаDer ReseAlvin YaquitoryОценок пока нет
- VENTДокумент1 страницаVENTAlvin YaquitoryОценок пока нет
- Informe de CirculaciónДокумент25 страницInforme de CirculaciónAlvin YaquitoryОценок пока нет
- La Escuela Como Institución Educativa Contextos de y para El AprendizajeДокумент12 страницLa Escuela Como Institución Educativa Contextos de y para El AprendizajeDaniel Luis SchiavoneОценок пока нет
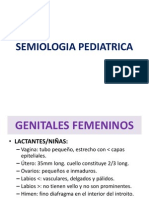
- Semiologia PediatricaДокумент31 страницаSemiologia PediatricaJimenita BardalesОценок пока нет
- Historia Del Calculo IntegralДокумент7 страницHistoria Del Calculo IntegralAlfredo Valencia71% (7)
- La Interacción Social en Facebook y La Identidad Del Adolescente Contemporáneo.Документ29 страницLa Interacción Social en Facebook y La Identidad Del Adolescente Contemporáneo.Germán Dartsch DreidemieОценок пока нет
- Reingenieria de Una Ilusión (ONG Conflicto y Paz) GZ PDFДокумент204 страницыReingenieria de Una Ilusión (ONG Conflicto y Paz) GZ PDFKapu Tejiendo VidaОценок пока нет
- Fundacion Carlos SlimДокумент1 страницаFundacion Carlos SlimJuan Carlos Jiménez NegreteОценок пока нет
- INDICE de Perfil de Grado 6to Semestre Mecatroncia (1) (Autoguardado)Документ14 страницINDICE de Perfil de Grado 6to Semestre Mecatroncia (1) (Autoguardado)Angel Miguel Ramos GirondaОценок пока нет
- Evaluacion para Sala de 5 AñosДокумент7 страницEvaluacion para Sala de 5 AñosVivi CrespoОценок пока нет
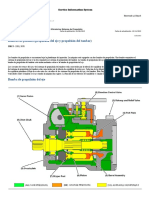
- CS-533E, CP-533E Vibratory Compactor BZE00001-UP Bombas de Pistones (Propulsión Del Eje y Propulsión Del Tambor)Документ23 страницыCS-533E, CP-533E Vibratory Compactor BZE00001-UP Bombas de Pistones (Propulsión Del Eje y Propulsión Del Tambor)CEVegaOОценок пока нет
- Evolución de La MercadotecniaДокумент6 страницEvolución de La MercadotecniaGaby Pérez OlveraОценок пока нет
- La Competencia PNLДокумент3 страницыLa Competencia PNLMiguel Angel Perez LopezОценок пока нет
- Operaciones CombinadasДокумент6 страницOperaciones CombinadasEduardo Luis Baidal TorresОценок пока нет
- Tres Días de Permiso Por Motivos PersonalesДокумент7 страницTres Días de Permiso Por Motivos PersonalesFernando Gamarra Morales86% (7)
- Caso AdidasДокумент30 страницCaso Adidasalexcamala156% (16)
- Sobre Pierre HadotДокумент19 страницSobre Pierre HadotFrancisco Javier SantanoОценок пока нет
- Circe y Las SirenasДокумент2 страницыCirce y Las Sirenasjulio93% (14)
- Análisis de La Problemática de La Educación Nacional SílaboДокумент4 страницыAnálisis de La Problemática de La Educación Nacional SílaboLeinoto Macedo CórdovaОценок пока нет
- Estructura Familiar - Electiv CPCPДокумент5 страницEstructura Familiar - Electiv CPCPSolvey Dayana RAMIREZ CEDENOОценок пока нет
- Modos Griegos RESUMENДокумент7 страницModos Griegos RESUMENJesús Di CesareОценок пока нет
- Seguridad Ciudadana LocalДокумент27 страницSeguridad Ciudadana LocalIsaac joeОценок пока нет
- EAP - UNIDAD 3. Desperdicios Que Se Generan en Las Cocinas HospitalariasДокумент30 страницEAP - UNIDAD 3. Desperdicios Que Se Generan en Las Cocinas HospitalariasLaura remedios morgadoОценок пока нет
- 2018-11-01 Harper's Bazaar - MexicoДокумент232 страницы2018-11-01 Harper's Bazaar - MexicoAnonymous HMjZknrrunОценок пока нет
- Respuestas Unidad 1Документ14 страницRespuestas Unidad 1Alexis Zamora FloresОценок пока нет
- Sed PerfectosДокумент2 страницыSed PerfectosNorma PeñaОценок пока нет
- Jesse y JoyДокумент12 страницJesse y JoyErika BermudezОценок пока нет
- Mona LisaДокумент3 страницыMona LisaChristopher VerduzcoОценок пока нет
- ANSES Aumento 12,39% para AUH, SUAF y Asignaciones FamiliaresДокумент3 страницыANSES Aumento 12,39% para AUH, SUAF y Asignaciones FamiliaresAnita DoñaОценок пока нет
- La Amazonía - Selva PeruanaДокумент32 страницыLa Amazonía - Selva PeruanaMaribel Chuye Coronado100% (10)
- Redaccion Mapa ConceptualДокумент1 страницаRedaccion Mapa Conceptualenzo100% (1)
- Material Informativo Sesion13 GoДокумент9 страницMaterial Informativo Sesion13 GoSerberoeduardo ChunaОценок пока нет