Вам также может понравиться
- Exam Electrical Machines and Drives (ET4117) : Grid Back EMF Time (S)Документ10 страницExam Electrical Machines and Drives (ET4117) : Grid Back EMF Time (S)chidoОценок пока нет
- Engi4258 Assignments Set1 SolutionsДокумент29 страницEngi4258 Assignments Set1 SolutionscristinacintiaОценок пока нет
- AssignmentsДокумент28 страницAssignmentsaly.abdulghafarОценок пока нет
- 9A02303 Electrical & Mechanical TechnologyДокумент4 страницы9A02303 Electrical & Mechanical TechnologysivabharathamurthyОценок пока нет
- Homwork May DienДокумент2 страницыHomwork May DienBk DecОценок пока нет
- 07a40202 Electrical Machines - IIДокумент8 страниц07a40202 Electrical Machines - IISRINIVASA RAO GANTAОценок пока нет
- Even EEДокумент7 страницEven EEFelix Mar Colipano EspejoОценок пока нет
- NR 220205 Electro Mechanics IIДокумент8 страницNR 220205 Electro Mechanics IISrinivasa Rao GОценок пока нет
- Analysis of Brushless Three-Phase Synchronous Generator Without ExciterДокумент10 страницAnalysis of Brushless Three-Phase Synchronous Generator Without ExciterJuan Andres Rojas SerranoОценок пока нет
- 1 The Four Quadrant DC-DC ConverterДокумент3 страницы1 The Four Quadrant DC-DC ConverterZaidBОценок пока нет
- Mte 3152 Electric Drives Mid TermДокумент2 страницыMte 3152 Electric Drives Mid TermAjitash TrivediОценок пока нет
- Tutorialtwo PDFДокумент3 страницыTutorialtwo PDFMostafa AhmedОценок пока нет
- Rr210303 Electrical EngineeringДокумент8 страницRr210303 Electrical EngineeringSrinivasa Rao GОценок пока нет
- Rr310205 Electromechanics IIIДокумент8 страницRr310205 Electromechanics IIISRINIVASA RAO GANTAОценок пока нет
- Faculty of Engineering and Science: Date December 15, 2016 Duration 4 HoursДокумент6 страницFaculty of Engineering and Science: Date December 15, 2016 Duration 4 HoursŸØüsap BasiliОценок пока нет
- r7310205 Electrical Machines IIIДокумент4 страницыr7310205 Electrical Machines IIIsivabharathamurthyОценок пока нет
- rr220402 Electrical TechnologyДокумент8 страницrr220402 Electrical TechnologySRINIVASA RAO GANTAОценок пока нет
- 9A02301 Electrical Engineering & Electronics EngineeringДокумент1 страница9A02301 Electrical Engineering & Electronics EngineeringsivabharathamurthyОценок пока нет
- Iempe 2015 Spring EndДокумент2 страницыIempe 2015 Spring EndMeesha VyasОценок пока нет
- BEEE - Unit - II - QBДокумент6 страницBEEE - Unit - II - QBSweetlineSoniaОценок пока нет
- The University of New South Wales Final Examination JUNE 2005Документ5 страницThe University of New South Wales Final Examination JUNE 2005Andrew XieОценок пока нет
- Scheme - I Sample Question PaperДокумент4 страницыScheme - I Sample Question Paperjijo123408Оценок пока нет
- Islamic University of Technology (Iut) Organisation of Islamic Cooperation (Oic)Документ1 страницаIslamic University of Technology (Iut) Organisation of Islamic Cooperation (Oic)Ashik AhmedОценок пока нет
- Ems FNLXM A99 AДокумент13 страницEms FNLXM A99 AdalbaasОценок пока нет
- Machines 2Документ18 страницMachines 2Debankan ChatterjeeОценок пока нет
- 9A02407 Electrical Machines - IIДокумент8 страниц9A02407 Electrical Machines - IIsivabharathamurthyОценок пока нет
- T.E Electrical QP2Документ36 страницT.E Electrical QP2Omkar SheteОценок пока нет
- 9a02308 Electrical Mechines IДокумент4 страницы9a02308 Electrical Mechines IsivabharathamurthyОценок пока нет
- How To Calculate New DC Motor Parameters of A Modified WindingДокумент7 страницHow To Calculate New DC Motor Parameters of A Modified WindingIqbal BaigОценок пока нет
- DC MachineДокумент33 страницыDC MachineJevon WilsonОценок пока нет
- Leb30303-Electro Technique 2Документ7 страницLeb30303-Electro Technique 2Alif AkmalОценок пока нет
- WWW - Manaresults.Co - In: II B. Tech I Semester Regular/Supplementary Examinations, Dec - 2015 Electrical Machiens-IДокумент5 страницWWW - Manaresults.Co - In: II B. Tech I Semester Regular/Supplementary Examinations, Dec - 2015 Electrical Machiens-IniharikaОценок пока нет
- Exam... Electrical Machnes-IДокумент31 страницаExam... Electrical Machnes-Icharlesc5746Оценок пока нет
- Rr220402 Electrical TechnologyДокумент8 страницRr220402 Electrical TechnologySrinivasa Rao GОценок пока нет
- Islamic University of Technology (Iut) Organisation of Islamic Cooperation (Oic)Документ4 страницыIslamic University of Technology (Iut) Organisation of Islamic Cooperation (Oic)Ashik AhmedОценок пока нет
- NR-220402-Electrical TechnologyДокумент8 страницNR-220402-Electrical TechnologytemesgenОценок пока нет
- EASA Mod 3 BK 4 Ac & DC Mech PDFДокумент76 страницEASA Mod 3 BK 4 Ac & DC Mech PDFNavaraj BaniyaОценок пока нет
- Introduction To Electrical Machines EMG (Copy)Документ6 страницIntroduction To Electrical Machines EMG (Copy)Ian PhilipОценок пока нет
- Eeb 301Документ2 страницыEeb 301rraj09102002Оценок пока нет
- Design Study On Novel Three-Phase Rotary Transformer Used For Brushless Doubly Fed Induction GeneratorsДокумент4 страницыDesign Study On Novel Three-Phase Rotary Transformer Used For Brushless Doubly Fed Induction GeneratorsHuong ThaoОценок пока нет
- Firstranker: Ii B. Tech I Semester Supplementary Examinations May - 2013 Electrical TechnologyДокумент4 страницыFirstranker: Ii B. Tech I Semester Supplementary Examinations May - 2013 Electrical Technologyteodoro berouОценок пока нет
- AC Drives: Dr. Adel A. El-Samahy Department of Electrical Engineering University of HelwanДокумент25 страницAC Drives: Dr. Adel A. El-Samahy Department of Electrical Engineering University of Helwanadelelsamahy5958Оценок пока нет
- Engineering ContentДокумент5 страницEngineering ContentVikas ChoudharyОценок пока нет
- Machines Tutorial Sheet #3 (2024)Документ4 страницыMachines Tutorial Sheet #3 (2024)Riya KoretiОценок пока нет
- Question Paper Code:: Reg. No.Документ3 страницыQuestion Paper Code:: Reg. No.BALAKRISHNANОценок пока нет
- Lista Cap 3Документ6 страницLista Cap 3Wagner WuthrichОценок пока нет
- DC MotorДокумент53 страницыDC MotorK04Anoushka TripathiОценок пока нет
- 9A02505 Electrical Machines-IIIДокумент4 страницы9A02505 Electrical Machines-IIIsivabharathamurthyОценок пока нет
- rr310205 Electromechanics IIIДокумент8 страницrr310205 Electromechanics IIISRINIVASA RAO GANTA100% (1)
- Question Paper Code:: Reg. No.Документ4 страницыQuestion Paper Code:: Reg. No.gokulchandruОценок пока нет
- rr222104 Elctrical and Electronics EngineeringДокумент8 страницrr222104 Elctrical and Electronics EngineeringSRINIVASA RAO GANTAОценок пока нет
- EE 2022 Electrical Machines & Drives IДокумент3 страницыEE 2022 Electrical Machines & Drives Imihir.rc.uomОценок пока нет
- Review Questions For Electrical Machines and DrivesДокумент14 страницReview Questions For Electrical Machines and DrivesClifford MkongОценок пока нет
- 07a30201 Electrical Machines IДокумент8 страниц07a30201 Electrical Machines IVelagandula AvinashОценок пока нет
- Constructional Details:: 1. Explain The Construction Details of Synchronous MotorДокумент28 страницConstructional Details:: 1. Explain The Construction Details of Synchronous MotorrioОценок пока нет
- Power System Transient Analysis: Theory and Practice using Simulation Programs (ATP-EMTP)От EverandPower System Transient Analysis: Theory and Practice using Simulation Programs (ATP-EMTP)Оценок пока нет
- Differential Forms on Electromagnetic NetworksОт EverandDifferential Forms on Electromagnetic NetworksРейтинг: 4 из 5 звезд4/5 (1)
- Advanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkОт EverandAdvanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkОценок пока нет
- Regulateurs Europa Product GuideДокумент13 страницRegulateurs Europa Product GuideJavierОценок пока нет
- SIEMENS 7SR158 Argus Catalogue SheetДокумент16 страницSIEMENS 7SR158 Argus Catalogue SheetbrunotomeОценок пока нет
- Capacitors: Publishing As Pearson (Imprint) BoylestadДокумент71 страницаCapacitors: Publishing As Pearson (Imprint) BoylestadFaisal UddinОценок пока нет
- Makita Drill 6095DДокумент12 страницMakita Drill 6095DpapaziarОценок пока нет
- Seepex BT Range InstructionsДокумент40 страницSeepex BT Range InstructionsАндрей СубботинОценок пока нет
- Design and Fabrication of Stair Climber TrolleyДокумент21 страницаDesign and Fabrication of Stair Climber TrolleyAnonymous 1mMOyt9zОценок пока нет
- Pcm120 Brochure PDFДокумент2 страницыPcm120 Brochure PDFshyroro2010Оценок пока нет
- Anam Ambil Back Up Volume Gak Ada BahanДокумент55 страницAnam Ambil Back Up Volume Gak Ada BahanMozart CilikОценок пока нет
- Cambridge International Examinations: Chemistry 9701/42 March 2017Документ12 страницCambridge International Examinations: Chemistry 9701/42 March 2017Sumaira AliОценок пока нет
- Electrolysis Plant Size Optimization and Benefit Analysis of A Far Offshore Wind-Hydrogen System Based On Information Gap Decision Theory and Chance Constraints ProgrammingДокумент13 страницElectrolysis Plant Size Optimization and Benefit Analysis of A Far Offshore Wind-Hydrogen System Based On Information Gap Decision Theory and Chance Constraints ProgrammingHumberto van OolОценок пока нет
- NEF67 TM3 DS P4A04N018E Mar06Документ2 страницыNEF67 TM3 DS P4A04N018E Mar06altieresmirandaОценок пока нет
- Naman Mehta Sustainable VIIIДокумент13 страницNaman Mehta Sustainable VIIInaman mehtaОценок пока нет
- Quantum Mechanics For Scientists and Engineers: David MillerДокумент40 страницQuantum Mechanics For Scientists and Engineers: David MillerBobbette BobbertОценок пока нет
- Special Electrical MachinesДокумент5 страницSpecial Electrical MachinesEswaran0% (1)
- Lesson 12a - Et332bДокумент23 страницыLesson 12a - Et332bLawiii KkkОценок пока нет
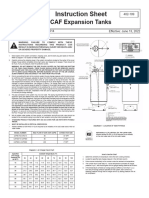
- Taco CAF Expansion Tank Install ManualДокумент3 страницыTaco CAF Expansion Tank Install ManualTEMPОценок пока нет
- Como Sobreviver A Um Apocalipse ZumbiДокумент30 страницComo Sobreviver A Um Apocalipse ZumbirejaneОценок пока нет
- Freezing Point Depression, Eutectic Point, Freezing Rate & Types of FreezersДокумент30 страницFreezing Point Depression, Eutectic Point, Freezing Rate & Types of Freezersrahulraj1122100% (1)
- Manual Qrod PDFДокумент17 страницManual Qrod PDFEzequiel GuerreroОценок пока нет
- Endress-Hauser Promag 55S ENДокумент4 страницыEndress-Hauser Promag 55S ENLwazi HanisiОценок пока нет
- Universal State Plumbing CodeДокумент118 страницUniversal State Plumbing CodecruzserОценок пока нет
- Daewoo Miniexcavadora SOLAR 030 / SOLAR 035Документ6 страницDaewoo Miniexcavadora SOLAR 030 / SOLAR 035MaquinzaОценок пока нет
- From Newton To Mandelbrot-A Primer in Theoretical PhysicsДокумент277 страницFrom Newton To Mandelbrot-A Primer in Theoretical PhysicsΠΑΝΑΓΙΩΤΗΣ ΨΥΧΑΣ100% (1)
- Life Cycle Inventory (LCI) Study: 2020 Data ReleaseДокумент74 страницыLife Cycle Inventory (LCI) Study: 2020 Data ReleaseDOCTORADO DIANAОценок пока нет
- Cooling Tower Water Turbine Taiwan: Lower NoiseДокумент16 страницCooling Tower Water Turbine Taiwan: Lower NoiseHarunОценок пока нет
- Petroleum Facilites of Germany 1945 100Документ33 страницыPetroleum Facilites of Germany 1945 100ENAK9000100% (1)
- Smpling - Storage - Transportation - Installation ProcedureДокумент75 страницSmpling - Storage - Transportation - Installation ProcedurePaddyОценок пока нет
- 2005 June Physics 2h PDFДокумент24 страницы2005 June Physics 2h PDFTatenda ChimwandaОценок пока нет
- List Three Examples of Matter Changing From One State To AnotherДокумент31 страницаList Three Examples of Matter Changing From One State To AnotherygjyoОценок пока нет
- BoostLi Energy Storage Module ESM-48100A6 User ManualДокумент51 страницаBoostLi Energy Storage Module ESM-48100A6 User ManualOdai Kiwan100% (3)