Вам также может понравиться
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- Student's Manual Essential Mathematics For Economic AnalysisДокумент100 страницStudent's Manual Essential Mathematics For Economic Analysismateo100% (2)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- OHS SJ Internals 9-16Документ8 страницOHS SJ Internals 9-16Aleksandar RakicОценок пока нет
- IAF Airman Group X Exam Preparation Ebook SSBCrack PDFДокумент462 страницыIAF Airman Group X Exam Preparation Ebook SSBCrack PDFRajnish rajyanОценок пока нет
- Second Order Approximation Solution of Nonlinear Large Deflection Problems of Yongjiang Railway Bridge in NingboДокумент14 страницSecond Order Approximation Solution of Nonlinear Large Deflection Problems of Yongjiang Railway Bridge in NingboYork ZengОценок пока нет
- Improved Prediction of Long-Term Prestress Loss in Unbonded Prestressed Concrete MembersДокумент15 страницImproved Prediction of Long-Term Prestress Loss in Unbonded Prestressed Concrete MembersYork ZengОценок пока нет
- The Abel Prize 2013-2017 PDFДокумент762 страницыThe Abel Prize 2013-2017 PDFYork ZengОценок пока нет
- A Comparison of Frame Stability Analysis Methods in AISC 360-05 PDFДокумент12 страницA Comparison of Frame Stability Analysis Methods in AISC 360-05 PDFYork ZengОценок пока нет
- RISA - Direct Analysis Method For AISC 13th Edition PDFДокумент11 страницRISA - Direct Analysis Method For AISC 13th Edition PDFYork ZengОценок пока нет
- BEPAC Acoustic Library Classification System PDFДокумент25 страницBEPAC Acoustic Library Classification System PDFYork ZengОценок пока нет
- Structural Analysis Lecture Notes PDFДокумент107 страницStructural Analysis Lecture Notes PDFYork ZengОценок пока нет
- Exact Ising Model Simulation On A Quantum ComputerДокумент9 страницExact Ising Model Simulation On A Quantum ComputerYork ZengОценок пока нет
- Eileen IntroductionДокумент43 страницыEileen IntroductionYork ZengОценок пока нет
- Kernels, Truth and SatisfactionДокумент4 страницыKernels, Truth and SatisfactionYork ZengОценок пока нет
- Interpolation in Extensions of First-Order LogicДокумент20 страницInterpolation in Extensions of First-Order LogicYork ZengОценок пока нет
- BCM User GuideДокумент12 страницBCM User GuideSan AungОценок пока нет
- Abstract AlgebraДокумент15 страницAbstract AlgebraIt'z HunnyОценок пока нет
- Intersection Matlab FunctionДокумент5 страницIntersection Matlab FunctionNadeem Ul HaqОценок пока нет
- Copy of ICPC Assiut Newcomers TrainingДокумент28 страницCopy of ICPC Assiut Newcomers Trainingsasasocial3Оценок пока нет
- Log ConcaveДокумент3 страницыLog ConcavediabetusОценок пока нет
- Notes About Numerical Methods With MatlabДокумент50 страницNotes About Numerical Methods With MatlabhugocronyОценок пока нет
- Complex Analysis Christer BennewitzДокумент116 страницComplex Analysis Christer BennewitzDivy ChhayaОценок пока нет
- Singular Value Array AND: Reducing The Computations of The Decomposition Given by Brent Luk YangДокумент13 страницSingular Value Array AND: Reducing The Computations of The Decomposition Given by Brent Luk YangDeepthi Priya BejjamОценок пока нет
- Entrance Exam SyllabusДокумент46 страницEntrance Exam SyllabusPrabakarОценок пока нет
- Bba Syllabus PDFДокумент38 страницBba Syllabus PDFPradeep Meher100% (1)
- Transformasi Linier-14Документ72 страницыTransformasi Linier-14Rizqie Puspita MayasariОценок пока нет
- Part A Ordinary Differential Equations (Odes) 1Документ7 страницPart A Ordinary Differential Equations (Odes) 1Daniel VargasОценок пока нет
- University of KeralaДокумент52 страницыUniversity of KeralaDr. Sini Raj SОценок пока нет
- Practical Implementation of PCA On Satellite ImagesДокумент10 страницPractical Implementation of PCA On Satellite ImagesPawan SinghОценок пока нет
- mth603 solvedbyAtifAli.....Документ9 страницmth603 solvedbyAtifAli.....Syed Muzaffar Ali NaqviОценок пока нет
- Out-Of-Plane Responses of A Circular Curved Timoshenko Beam Due To A Moving LoadДокумент24 страницыOut-Of-Plane Responses of A Circular Curved Timoshenko Beam Due To A Moving LoadmlouredocasadoОценок пока нет
- Data Strcuture Lab - 03 AIUBДокумент11 страницData Strcuture Lab - 03 AIUBmahin ramchagolОценок пока нет
- Introduction To Programming With Matlab: ExercisesДокумент18 страницIntroduction To Programming With Matlab: ExercisesHương Đặng100% (1)
- Csc461: Lecture 16 Opengl TransformationsДокумент20 страницCsc461: Lecture 16 Opengl Transformationsrahul.yerrawarОценок пока нет
- Python For Data AnalysisДокумент39 страницPython For Data Analysiswvargas92650% (2)
- Numerical Methods in Finance. Part A. (2010-2011)Документ23 страницыNumerical Methods in Finance. Part A. (2010-2011)RajulОценок пока нет
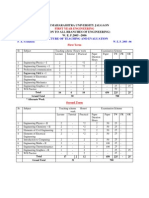
- North Maharashtra University Jalgaon (Common To All Branches of Engineering) W. E. F.2005 - 2006Документ19 страницNorth Maharashtra University Jalgaon (Common To All Branches of Engineering) W. E. F.2005 - 2006satish173Оценок пока нет
- Assignment 4 WorkshopДокумент3 страницыAssignment 4 Workshophei kwongОценок пока нет
- Solving A Second Order Differential Equation With Runge KuttaДокумент2 страницыSolving A Second Order Differential Equation With Runge Kuttasachins1318Оценок пока нет
- MRM 27511Документ46 страницMRM 27511Ryu ReyhanОценок пока нет
- Hotelling 1936Документ57 страницHotelling 1936Rezky Andriady IdhilОценок пока нет
- Numerical Evaluation of Energy Levels and Wave Functions For Hindered Internal RotationДокумент8 страницNumerical Evaluation of Energy Levels and Wave Functions For Hindered Internal RotationAitor PastorОценок пока нет