Вам также может понравиться
- Diaz Yordy Problemas Taller2Документ7 страницDiaz Yordy Problemas Taller2DIAZ YORDYОценок пока нет
- Harmonic DriveДокумент9 страницHarmonic DriveNomas FraudeОценок пока нет
- Teorema Del Muestreo y El Problema Del Enmascaramiento de SeñalesДокумент4 страницыTeorema Del Muestreo y El Problema Del Enmascaramiento de SeñalesJesus Antonio Mtz100% (2)
- Criterios de Estabilidad JURYДокумент13 страницCriterios de Estabilidad JURYDavid NietoОценок пока нет
- Generador Diente SierraДокумент18 страницGenerador Diente SierraGustavo Huanquiri Quispe100% (1)
- Criterio de Estabilidad de RouthДокумент40 страницCriterio de Estabilidad de RouthReech Dirt EpОценок пока нет
- Modelo Robot BalancinДокумент8 страницModelo Robot BalancinKevin E. Godinez OrtizОценок пока нет
- Taller 001 Teoria de Control - PREGUNTASДокумент6 страницTaller 001 Teoria de Control - PREGUNTASAllen YusedОценок пока нет
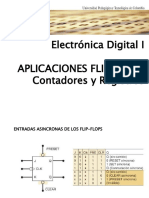
- Contadores y RegistrosДокумент32 страницыContadores y RegistrospepaОценок пока нет
- Practica Contador Del 0 Al 99Документ6 страницPractica Contador Del 0 Al 99Richard EdwardОценок пока нет
- 1 - Controlador Clasico de Tres Modos PIDДокумент40 страниц1 - Controlador Clasico de Tres Modos PIDfedegb2010Оценок пока нет
- CADe SIMUДокумент101 страницаCADe SIMUjuan0% (1)
- Lab 06. Diagrama de Bloques DiscretosДокумент14 страницLab 06. Diagrama de Bloques DiscretosLeonardo VieraОценок пока нет
- Control Discretizacion de Controladores y PlantasДокумент30 страницControl Discretizacion de Controladores y PlantasCharles Rhodes RhodesОценок пока нет
- Control de Motores Con AssemblerДокумент17 страницControl de Motores Con AssemblerTazann24Оценок пока нет
- Analisis de Sistemas en El Espacio de Estados.Документ7 страницAnalisis de Sistemas en El Espacio de Estados.Paul Guillen100% (2)
- Experimento 29Документ3 страницыExperimento 29samuelОценок пока нет
- EXA2G3OI PdfcreatorДокумент38 страницEXA2G3OI PdfcreatorTomas Sanchez TronoОценок пока нет
- Formato para TrabajosДокумент18 страницFormato para TrabajosHelio Mamani Andrade0% (1)
- Laboratorio de Control Ii Diagrama de Bode, Nyquist y NicholsДокумент20 страницLaboratorio de Control Ii Diagrama de Bode, Nyquist y Nicholsrosario arenas dionicioОценок пока нет
- Circuito AntireboteДокумент4 страницыCircuito AntireboteJavier PuenteОценок пока нет
- Parametros de DENAVIT-HARTENBERGДокумент8 страницParametros de DENAVIT-HARTENBERGToño DueñasОценок пока нет
- Simplifique El Diagrama Que Aparece en La Figura 3Документ9 страницSimplifique El Diagrama Que Aparece en La Figura 3Jose Domingues Mamani0% (1)
- Laboratorio#3Документ5 страницLaboratorio#3Sergio100% (1)
- Practica 4 ContadoresДокумент11 страницPractica 4 ContadoresMario CernaОценок пока нет
- TroceadorДокумент198 страницTroceadorJacqueline LunaОценок пока нет
- Informe 3 Control DigitalДокумент6 страницInforme 3 Control DigitalNico PerezОценок пока нет
- Lugar Geometrico de Las RaicesДокумент17 страницLugar Geometrico de Las RaicesJose David Peña VargasОценок пока нет
- Operaciones Aritmeticas PLCДокумент67 страницOperaciones Aritmeticas PLCAnonymous J5T1RpfОценок пока нет
- Amplificadores OperacionalesДокумент2 страницыAmplificadores OperacionalesOscar HernándezОценок пока нет
- Unidad 1 Contro ElectricoДокумент26 страницUnidad 1 Contro ElectricoRuben Alvarez100% (1)
- Acciones de ControlДокумент55 страницAcciones de ControlPaolo Andrés Pancho Ramírez0% (1)
- Instrucciones Del PIC16F84A y ATMEGA328Документ3 страницыInstrucciones Del PIC16F84A y ATMEGA328Luis Fernando Ayasta PortocarreroОценок пока нет
- Sistema en SimulinkДокумент3 страницыSistema en Simulinkandres_mgОценок пока нет
- Práctica No. 4 CODIFICADORДокумент4 страницыPráctica No. 4 CODIFICADOROSCAR JOSUE KUK CONTRERASОценок пока нет
- Amplificadores de TensiónДокумент13 страницAmplificadores de TensiónJose Manuel Mendez Flores100% (1)
- Guía de Ejercicios Prueba N°2Документ1 страницаGuía de Ejercicios Prueba N°2Esbany Lanchipa SanchezОценок пока нет
- Dinamica de Un Motor DC en Tiempo DiscretoДокумент3 страницыDinamica de Un Motor DC en Tiempo DiscretoIsaias FloCaОценок пока нет
- Diseño Logico Secuencial Con VHDLДокумент43 страницыDiseño Logico Secuencial Con VHDLENIC-AITCG100% (1)
- Algoritmo de Denavit-HartenbergДокумент3 страницыAlgoritmo de Denavit-HartenbergLuis LoyolaОценок пока нет
- PLC Step 7 SemaforoДокумент12 страницPLC Step 7 SemaforoRafaVolksОценок пока нет
- Vibraciones Mecánicas (Ramón Martínez)Документ215 страницVibraciones Mecánicas (Ramón Martínez)'Larry ZerpaОценок пока нет
- Control Ad or de Tiempo Finito (Dead Beat)Документ66 страницControl Ad or de Tiempo Finito (Dead Beat)Ruben de los SantosОценок пока нет
- Ejercicio de Aplicacion-TДокумент5 страницEjercicio de Aplicacion-TErick ChavezОценок пока нет
- Control Por Realimentación de Estados Del Motor DCДокумент11 страницControl Por Realimentación de Estados Del Motor DCMilo VanvanОценок пока нет
- Control Por Realimentacion de EstadosДокумент44 страницыControl Por Realimentacion de EstadosJose FonsecaОценок пока нет
- Balancín Con Control PIDДокумент11 страницBalancín Con Control PIDMack Gonzalez GarciaОценок пока нет
- 1 - Introduccion A La Ca PDFДокумент20 страниц1 - Introduccion A La Ca PDFMiguel FerrerОценок пока нет
- Modelado de Sistemas DinámicosДокумент44 страницыModelado de Sistemas DinámicosJUAN4201Оценок пока нет
- Informe Amplificador Audio 20 WДокумент8 страницInforme Amplificador Audio 20 WCristian Rodriguez50% (2)
- Informe ProyectoДокумент6 страницInforme ProyectoJorge ZambranoОценок пока нет
- Practica 7 Disparo SCRДокумент6 страницPractica 7 Disparo SCREnrique GarciaОценок пока нет
- Tipos de AmortiguamientoДокумент4 страницыTipos de AmortiguamientoDanperdomoОценок пока нет
- Ejercicios (Cap.2 Ogata)Документ7 страницEjercicios (Cap.2 Ogata)Melissa EstradaОценок пока нет
- Examen Parcial de Control (Molina)Документ6 страницExamen Parcial de Control (Molina)Paul MolinaОценок пока нет
- Capítulo 2 - Parte 3Документ13 страницCapítulo 2 - Parte 3Roy VegaОценок пока нет
- Diagrama de Bloques - CRISTHIAN QUISPEДокумент10 страницDiagrama de Bloques - CRISTHIAN QUISPEBrian Condo RamosОценок пока нет
- 1-Modelo Matematico T Laplace v2Документ4 страницы1-Modelo Matematico T Laplace v2KEVIN SEBASTIAN CACERES MOJICAОценок пока нет
- Transformada de LaplaceДокумент1 страницаTransformada de LaplaceCarrillo Hernández Alam IsraelОценок пока нет
- Prev.2 Ing - Control 1609A Guzman Alcantara Miguel GonzaloДокумент4 страницыPrev.2 Ing - Control 1609A Guzman Alcantara Miguel GonzaloRafael Garcia IbarraОценок пока нет
- Calculos de Orejas de IzajeДокумент1 страницаCalculos de Orejas de IzajeDiegoNavarro100% (1)
- Manual de Instalcion Vitaulica PDFДокумент156 страницManual de Instalcion Vitaulica PDFDiegoNavarroОценок пока нет
- K Cc2 146b Const Proc 033 RB EawДокумент34 страницыK Cc2 146b Const Proc 033 RB EawDiegoNavarroОценок пока нет
- WS NDT P PT 01 Proc Tinta PenetranteДокумент12 страницWS NDT P PT 01 Proc Tinta PenetranteDiegoNavarroОценок пока нет
- G2004 Archivos GeneralesДокумент160 страницG2004 Archivos GeneralesDiegoNavarroОценок пока нет
- Memoria de Calculo para La EstructuraДокумент5 страницMemoria de Calculo para La EstructuraDiegoNavarroОценок пока нет
- Memoria de Calculo para La EstructuraДокумент5 страницMemoria de Calculo para La EstructuraDiegoNavarroОценок пока нет
- PPS Ppto 0039 2018 Rev 2Документ19 страницPPS Ppto 0039 2018 Rev 2DiegoNavarroОценок пока нет
- Estructura Secuencial Unidad II - 2013 PDFДокумент23 страницыEstructura Secuencial Unidad II - 2013 PDFDenisОценок пока нет
- Carta GanttДокумент15 страницCarta GanttNataly B InostrozaОценок пока нет
- Teoria de FuncionesДокумент2 страницыTeoria de FuncionesAlejandro Dal BuoniОценок пока нет
- LPL 2 PatronesДокумент132 страницыLPL 2 PatronesAdriana UrciuoloОценок пока нет
- Método de Deduccion NaturalДокумент2 страницыMétodo de Deduccion NaturalRafael Mora Ramirez100% (1)
- Laboratorio 02 P&IDДокумент6 страницLaboratorio 02 P&IDyerson romОценок пока нет
- Linea de Tiempo Años 90Документ1 страницаLinea de Tiempo Años 90Angily Paola CruzОценок пока нет
- PCMДокумент15 страницPCMsborgo92Оценок пока нет
- Hoja de Vida Jose CostalesДокумент8 страницHoja de Vida Jose CostalesJose CostalesОценок пока нет
- 5 Procesos CreativosДокумент2 страницы5 Procesos CreativosAdolfo G GarОценок пока нет
- Norma AACE Internacional 18R 97Документ16 страницNorma AACE Internacional 18R 97Carlos Andres Gonzales VerasteguiОценок пока нет
- Ciclo de Vida de SoaДокумент3 страницыCiclo de Vida de SoaRudy Vásquez PalaciosОценок пока нет
- Interesante - Curso Iniciacion A Excel XP-26063859Документ129 страницInteresante - Curso Iniciacion A Excel XP-26063859xavazque2Оценок пока нет
- Como Crear Un Juego en PhaserДокумент19 страницComo Crear Un Juego en PhaserJuanjo Garro AcuñaОценок пока нет
- Libro en DesarrolloДокумент101 страницаLibro en DesarrolloRodriguita RsmirezОценок пока нет
- Syllabus de Curso Inclusión SocialДокумент8 страницSyllabus de Curso Inclusión SocialMayОценок пока нет
- Ficha Aprendizaje Seguridad LogicaДокумент1 страницаFicha Aprendizaje Seguridad Logica466824Оценок пока нет
- Presentacion Windows 2000Документ73 страницыPresentacion Windows 2000Miguel Angel MuñozОценок пока нет
- Metodología de La Investigación - Sampieri - 6ta EDICIONДокумент2 страницыMetodología de La Investigación - Sampieri - 6ta EDICIONMisfort194Оценок пока нет
- Fpa1000ul Install 0904 SPДокумент188 страницFpa1000ul Install 0904 SPCasey CamposОценок пока нет
- ProLog Factory (Flyer) PDFДокумент2 страницыProLog Factory (Flyer) PDFJose Roberto ArredondoОценок пока нет
- Modelo para La Creación de Entornos de Aprendizaje Basados en Técnicas de Gestión Del ConocimientoДокумент12 страницModelo para La Creación de Entornos de Aprendizaje Basados en Técnicas de Gestión Del ConocimientoJhoel Flores LimachiОценок пока нет
- Robotica PresentacionДокумент62 страницыRobotica PresentacionAna MolinaОценок пока нет
- Laboratorio 2Документ14 страницLaboratorio 2nicol sandovalОценок пока нет
- Unidad 2Документ21 страницаUnidad 2Xitlaly Yacaren ToalaОценок пока нет
- Guia Raid N68-VS3 FX SpanishДокумент28 страницGuia Raid N68-VS3 FX SpanishKevin EchavarríaОценок пока нет
- 3.3.3.3.3 Packet Tracer Exploración de Una RedДокумент3 страницы3.3.3.3.3 Packet Tracer Exploración de Una RedDanny AvilaОценок пока нет
- Comparador AnálogicoДокумент22 страницыComparador AnálogicoFátima Angeles Lozano0% (1)
- Paolo RuffiniДокумент5 страницPaolo Ruffinielimonica22Оценок пока нет