Вам также может понравиться
- Lab 4 de Dinamica AplicadaДокумент13 страницLab 4 de Dinamica AplicadaLuigi PortugalОценок пока нет
- Laboratorio 2 Dinamica AplicadaДокумент7 страницLaboratorio 2 Dinamica AplicadaAriel JuncaОценок пока нет
- Lab 3 DinamicaДокумент7 страницLab 3 Dinamicaanthony aizpuruaОценок пока нет
- Laboratorio 2. Vibración Libre de Un Sistema Masa-ResorteДокумент12 страницLaboratorio 2. Vibración Libre de Un Sistema Masa-ResorteDelgado FrancockОценок пока нет
- LABORATORIO 2, Dinamica AplicadaДокумент6 страницLABORATORIO 2, Dinamica AplicadaJerry ValdezОценок пока нет
- Laboratorio#1 Dinamica AplicadaДокумент12 страницLaboratorio#1 Dinamica AplicadaRADG16Оценок пока нет
- Expo de Esfuerzos 2Документ5 страницExpo de Esfuerzos 2Alex Campos ZapataОценок пока нет
- Informe 9 ConveccionДокумент7 страницInforme 9 Conveccionjuan peñaОценок пока нет
- 04 Modificaciones Del Ciclo Rankine Parte 2Документ31 страница04 Modificaciones Del Ciclo Rankine Parte 2Joel CaceresОценок пока нет
- Noemy González Vargas - 511341 - 0Документ10 страницNoemy González Vargas - 511341 - 0LolaОценок пока нет
- Lab 2 Terminado PDFДокумент6 страницLab 2 Terminado PDFManuel Arciniegas0% (1)
- Problemas Vibraciones ResueltosДокумент11 страницProblemas Vibraciones ResueltosOmar Puga0% (1)
- Electrónica de potencia - problemas de control y circuitos de disparoДокумент2 страницыElectrónica de potencia - problemas de control y circuitos de disparoSamuel RodriguezОценок пока нет
- LaboratorioДокумент5 страницLaboratorioManuel GomezОценок пока нет
- Lab 07 Compensación Capacitiva en Sistemas de PotenciaДокумент5 страницLab 07 Compensación Capacitiva en Sistemas de PotenciaAbelardo Warner100% (2)
- Dinámica Aplicada y Teoría de Control-Lab. #4Документ39 страницDinámica Aplicada y Teoría de Control-Lab. #4Juan HawkinsОценок пока нет
- Volante de inercia para máquinasДокумент7 страницVolante de inercia para máquinasRicardo MartinezОценок пока нет
- (L) Lab8-DinamicaAplicada-COMPORTAMIENTO DE UN PÉNDULO COMPLEJO PARTE CДокумент11 страниц(L) Lab8-DinamicaAplicada-COMPORTAMIENTO DE UN PÉNDULO COMPLEJO PARTE CCheynОценок пока нет
- Tarea 7 1,2Документ3 страницыTarea 7 1,2GuussttОценок пока нет
- Lab#1 - Elementos Físicos de Un Sistema Mecanico DimanicoДокумент10 страницLab#1 - Elementos Físicos de Un Sistema Mecanico Dimanicoaquiros29Оценок пока нет
- Análisis de elementos físicos de sistemas dinámicosДокумент21 страницаAnálisis de elementos físicos de sistemas dinámicossamuel gonzalezОценок пока нет
- Unidad 3. Vibraciones 2.0Документ34 страницыUnidad 3. Vibraciones 2.0Gerardo HernándezОценок пока нет
- Lab 5 Sistemas Con TransformadoresДокумент4 страницыLab 5 Sistemas Con TransformadoresNanaGogoОценок пока нет
- Laboratorio 7 - Vibración Armónica de Sistemas Dinámicos de Segundo OrdenДокумент7 страницLaboratorio 7 - Vibración Armónica de Sistemas Dinámicos de Segundo OrdenSamantha OrtegaОценок пока нет
- 1ie131 Lmfi C Lab1 CAДокумент12 страниц1ie131 Lmfi C Lab1 CACarlos Alvarado100% (1)
- (L) Lab2-Dinamicaaplicada-comportamiento de Los Resortes Bajo CargaДокумент24 страницы(L) Lab2-Dinamicaaplicada-comportamiento de Los Resortes Bajo CargaCheyn50% (4)
- Tarea 3 de DinamicaДокумент7 страницTarea 3 de DinamicaGisell Lasso100% (1)
- Tarea 1 de Diseño MecanicoДокумент4 страницыTarea 1 de Diseño MecanicoMiguel AngelОценок пока нет
- Proyecto Final de DiseñoДокумент45 страницProyecto Final de DiseñoDavid SanchezОценок пока нет
- (L) Lab6-DinamicaAplicada-COMPORTAMIENTO DE UN PÉNDULO SIMPLE (HILO Y MASA) " PARTE AДокумент12 страниц(L) Lab6-DinamicaAplicada-COMPORTAMIENTO DE UN PÉNDULO SIMPLE (HILO Y MASA) " PARTE ACheynОценок пока нет
- Tarea IseeДокумент2 страницыTarea IseeAnonymous Vc1SAkОценок пока нет
- Laboratorio 2 ViscosidadДокумент3 страницыLaboratorio 2 ViscosidadManuel GomezОценок пока нет
- EP DINAMICA 2016 B SolucionarioДокумент5 страницEP DINAMICA 2016 B SolucionarioAndres Siu AlvaradoОценок пока нет
- Informe N1Документ6 страницInforme N1joeth100% (1)
- Sistemas de dos grados de libertad y ecuaciones de movimiento de pendulos simples y doblesДокумент4 страницыSistemas de dos grados de libertad y ecuaciones de movimiento de pendulos simples y doblesmorelo80% (2)
- Motores de ignición por chispa: calor suministrado, eficiencia térmica y presión efectiva mediaДокумент4 страницыMotores de ignición por chispa: calor suministrado, eficiencia térmica y presión efectiva mediaEuclides HernándezОценок пока нет
- Ciclo Termodinamico de Los Motores de EmboloДокумент23 страницыCiclo Termodinamico de Los Motores de EmboloHarlyn Requejo RodasОценок пока нет
- Taller Del Módulo No.3-Grupo 1Документ7 страницTaller Del Módulo No.3-Grupo 1LolaОценок пока нет
- Asignacion 1 Dinamica AplicadaДокумент2 страницыAsignacion 1 Dinamica AplicadaOmar RiveraОценок пока нет
- Asignacion 1 Dinamica AplicadaДокумент4 страницыAsignacion 1 Dinamica AplicadaEdgardoEnriqueConteОценок пока нет
- Problemas de Tarea 3Документ4 страницыProblemas de Tarea 3Choque Villca JuanОценок пока нет
- Dinamica Aplicada - Laboratorio #5Документ13 страницDinamica Aplicada - Laboratorio #5Omar RiveraОценок пока нет
- Tarea #1 - Análisis Del Esfuerzo y Círculo de MohrДокумент1 страницаTarea #1 - Análisis Del Esfuerzo y Círculo de Mohrchvn0% (1)
- Facultad de Ingeniería Mecánica Lic. en Ingeniería Naval 1NI-121Документ12 страницFacultad de Ingeniería Mecánica Lic. en Ingeniería Naval 1NI-121marlon playОценок пока нет
- Laboraorio 2 de NeumaticaДокумент12 страницLaboraorio 2 de NeumaticaTomas Jahir Guardia GuerraОценок пока нет
- Conduccion Axial en Una Barra Metalica y Determinacion de Su Conductividad Termica KДокумент5 страницConduccion Axial en Una Barra Metalica y Determinacion de Su Conductividad Termica KJorge Isaac Flores SamaniegoОценок пока нет
- Laboratorio #1 Conceptos FundamentalesДокумент7 страницLaboratorio #1 Conceptos Fundamentalesgary batistaОценок пока нет
- 7906 Diseño de Sistemas Termicos y Fluidicos (5 - 8 - 2018)Документ7 страниц7906 Diseño de Sistemas Termicos y Fluidicos (5 - 8 - 2018)Benigno Vargas G.Оценок пока нет
- Laboratorio de Mecanica de Fluido 5Документ10 страницLaboratorio de Mecanica de Fluido 5NicoОценок пока нет
- Lab6 - Vibraciones de Segundo OrdenДокумент13 страницLab6 - Vibraciones de Segundo OrdenMaria SОценок пока нет
- Tarea 1.3Документ10 страницTarea 1.3IsaacGranadosОценок пока нет
- Laboratorio 9 IndividualДокумент10 страницLaboratorio 9 IndividualbernardoОценок пока нет
- 1ie133 Lmfii B Lab5 KB JC AjДокумент8 страниц1ie133 Lmfii B Lab5 KB JC AjJesus CastilloОценок пока нет
- Lab #1 Elementos Fisicos de Sistemas DinamicosДокумент12 страницLab #1 Elementos Fisicos de Sistemas DinamicosAndré Morán100% (1)
- Lab 3Документ11 страницLab 3Jesus CastilloОценок пока нет
- Propiedades mecánicas y estructura metalográficaДокумент5 страницPropiedades mecánicas y estructura metalográficaRubiela ÁguilaОценок пока нет
- Ecuaciones rectoras para sistemas de un solo grado de libertadДокумент41 страницаEcuaciones rectoras para sistemas de un solo grado de libertadGustavo ArmellaОценок пока нет
- Lab 9-Pendulo SimpleДокумент19 страницLab 9-Pendulo SimpleCristal CastilloОценок пока нет
- Determinación del Momento de Inercia usando la suspensión bifilarДокумент9 страницDeterminación del Momento de Inercia usando la suspensión bifilarRaúl Alfonso RamírezОценок пока нет
- Solution of Mathisson-Papapetrou-Dixon equations: for spinning test particles in a Kerr metricОт EverandSolution of Mathisson-Papapetrou-Dixon equations: for spinning test particles in a Kerr metricОценок пока нет
- Tratamiento Aguas de LastreДокумент153 страницыTratamiento Aguas de LastreCalandrasReyCalandrasrey100% (1)
- Gestión de la reparación de un buque en astilleroДокумент118 страницGestión de la reparación de un buque en astilleroAnibal Vp100% (1)
- Ejercicios Resueltos Y Explicados de Circuitos Monofasicos PDFДокумент212 страницEjercicios Resueltos Y Explicados de Circuitos Monofasicos PDFAldoyGloria CorredoresОценок пока нет
- Geometria de La HeliceДокумент7 страницGeometria de La HeliceJhonathan RincónОценок пока нет
- Aspectos a considerar en el diseño de una planta propulsora marítimaДокумент39 страницAspectos a considerar en el diseño de una planta propulsora marítimaAlfredoLopez100% (1)
- Aws D1.1 2015 Español PDFДокумент650 страницAws D1.1 2015 Español PDFLora Boyd100% (21)
- Sistema Propulsion BuqueДокумент31 страницаSistema Propulsion BuqueVictor Jesus RiosОценок пока нет
- Articulo Cientifico - AmbienteДокумент6 страницArticulo Cientifico - AmbienteAlfredoLopez100% (1)
- Calculo Matricial de EstructurasДокумент27 страницCalculo Matricial de EstructurasAlfredoLopez100% (1)
- Diseno y Calculo Estructural de Plataforma para Soporte y Contencion de Tarimas PDFДокумент23 страницыDiseno y Calculo Estructural de Plataforma para Soporte y Contencion de Tarimas PDFAlfredoLopezОценок пока нет
- Calculo de Estructuras de BuquesДокумент332 страницыCalculo de Estructuras de BuquesAlfredoLopezОценок пока нет
- LopezGonzalez JuanManuel TFG 2013Документ325 страницLopezGonzalez JuanManuel TFG 2013AlfredoLopezОценок пока нет
- Condiciones frontera vigasДокумент7 страницCondiciones frontera vigasAbisahi Peral OrtizОценок пока нет
- Diseño de Un Sistema de LastreДокумент65 страницDiseño de Un Sistema de LastreAlfredoLopezОценок пока нет
- Inv 3 Dif FinДокумент24 страницыInv 3 Dif FinNacho Benito SotoОценок пока нет
- Geometría Del ShipДокумент49 страницGeometría Del ShipAdan Vega SaenzОценок пока нет
- Maniobrabilidad de Un Buque PesqueroДокумент9 страницManiobrabilidad de Un Buque PesqueroAlfredoLopezОценок пока нет
- Ejemplo Del Cálculo de La Estructura de Un Buque - Rev.1 PDFДокумент17 страницEjemplo Del Cálculo de La Estructura de Un Buque - Rev.1 PDFAlfredoLopezОценок пока нет
- Norma de La ACPДокумент8 страницNorma de La ACPAlfredoLopezОценок пока нет
- Catalogo FujitsuДокумент257 страницCatalogo FujitsuAlfredoLopezОценок пока нет
- Geometria de La HeliceДокумент7 страницGeometria de La HeliceJhonathan RincónОценок пока нет
- Propulsià N y GobiernoДокумент7 страницPropulsià N y GobiernoJon GoitiaОценок пока нет
- Sole Cataleg EsДокумент204 страницыSole Cataleg EsAlfredoLopez100% (1)
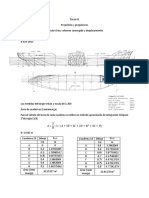
- Propulsión y propulsores: Cálculo de área, volumen sumergido y desplazamientoДокумент4 страницыPropulsión y propulsores: Cálculo de área, volumen sumergido y desplazamientoAlfredoLopezОценок пока нет
- Tfe Mar ManДокумент249 страницTfe Mar ManEdson AcostaОценок пока нет
- Inspección Del Bloque de Un MotorДокумент3 страницыInspección Del Bloque de Un MotorAlfredoLopez50% (2)
- Leyes Maritima NavegacionДокумент5 страницLeyes Maritima Navegacionjjcarcamo20037015Оценок пока нет
- Movimiento Curvilineo en Coordenadas RectangularesДокумент7 страницMovimiento Curvilineo en Coordenadas RectangularesWilliamLordОценок пока нет
- Informe Efecto Hall PDFДокумент6 страницInforme Efecto Hall PDFcdavidqgОценок пока нет
- Deber 4 Centrales 2020BДокумент1 страницаDeber 4 Centrales 2020BAlex Romero BustosОценок пока нет
- UD 10. DinámicaДокумент22 страницыUD 10. DinámicaBruno UllaОценок пока нет
- Movimientos de EdificiosДокумент168 страницMovimientos de EdificiosanarОценок пока нет
- 1 Temario o Sílabus Walter Lauro PerezДокумент9 страниц1 Temario o Sílabus Walter Lauro Pereznahum androssiОценок пока нет
- Potencias ElectrotecniaДокумент7 страницPotencias ElectrotecniaPaula AlcaláОценок пока нет
- EO51E 8va. SEMANA 05Документ9 страницEO51E 8va. SEMANA 05Yenny Rojas ShuanОценок пока нет
- Trabajo de Implementacion Momento 2Документ11 страницTrabajo de Implementacion Momento 2julianОценок пока нет
- Análisis estructural métodos hiperestáticosДокумент23 страницыAnálisis estructural métodos hiperestáticosMichael GonzalesОценок пока нет
- Seminario 01 Julio 2023Документ5 страницSeminario 01 Julio 2023RichardОценок пока нет
- FEMДокумент4 страницыFEMWilbertОценок пока нет
- Fuerza de Equilibrio Estatico en La Madre Tierra y El CosmosДокумент2 страницыFuerza de Equilibrio Estatico en La Madre Tierra y El CosmosMarianela BrañezОценок пока нет
- Serie de Ejercicios Física 2Документ5 страницSerie de Ejercicios Física 2verdeoros uaemexОценок пока нет
- Diagrama Columnas EmpacadasДокумент18 страницDiagrama Columnas EmpacadasLuz María PeñafielОценок пока нет
- Aplicaciones Ecuacion de Bernoulli PDFДокумент5 страницAplicaciones Ecuacion de Bernoulli PDFNicolas Sanchez GomezОценок пока нет
- Prueba de Ciencias Naturales 7Документ3 страницыPrueba de Ciencias Naturales 7Anonymous 2C7g5n3ugrОценок пока нет
- Motores y Máquinas Eléctricas - MolinaДокумент294 страницыMotores y Máquinas Eléctricas - MolinaWILBER CONDORI QUISPE76% (21)
- DINAMÍCAДокумент20 страницDINAMÍCAMonserrat GarciaОценок пока нет
- Problema de Diseño Con Engranes RectosДокумент13 страницProblema de Diseño Con Engranes RectosRoberto Mauricio MoncadaОценок пока нет
- Maquinas TérmicasДокумент5 страницMaquinas TérmicasMaria joseОценок пока нет
- 202219203844practica SupervisadaДокумент39 страниц202219203844practica Supervisadaalexis revolorioОценок пока нет
- SD2115AMДокумент4 страницыSD2115AMBeatriz VillegasОценок пока нет
- Conveccion Natural Sobre Superficies PDFДокумент4 страницыConveccion Natural Sobre Superficies PDFCaleb CotrinaОценок пока нет
- Presiones laterales de tierraДокумент51 страницаPresiones laterales de tierraYessika Roxana Alvarez Zamalloa100% (1)
- Caída libre y movimiento parabólicoДокумент3 страницыCaída libre y movimiento parabólicoHenry PaulОценок пока нет
- CB008 Prob Soln Book StyДокумент36 страницCB008 Prob Soln Book Styramsell camachoОценок пока нет
- CH16Документ39 страницCH16Molina GabrielaОценок пока нет
- Silabo Por Competencia Pedro Flores 2014a Transferencia de CalorДокумент7 страницSilabo Por Competencia Pedro Flores 2014a Transferencia de CalorMauricio Ballón GómezОценок пока нет