Вам также может понравиться
- Métodos de Control de CampoДокумент5 страницMétodos de Control de CampoSergio Aguilar RicoОценок пока нет
- Practices Manual For Multi Protocol CommunicationДокумент15 страницPractices Manual For Multi Protocol CommunicationSergio Aguilar RicoОценок пока нет
- SmartPen Marketing StudyДокумент5 страницSmartPen Marketing StudySergio Aguilar RicoОценок пока нет
- Noise Cancelling With Matlab ToolboxДокумент2 страницыNoise Cancelling With Matlab ToolboxSergio Aguilar RicoОценок пока нет
- Ensamblaje 3 Piezas ElectroneumáticaДокумент1 страницаEnsamblaje 3 Piezas ElectroneumáticaSergio Aguilar RicoОценок пока нет
- Lámpara AsíncronaДокумент1 страницаLámpara AsíncronaSergio Aguilar RicoОценок пока нет
- Queues Labview 2016Документ8 страницQueues Labview 2016Sergio Aguilar RicoОценок пока нет
- Mecanismo de Theo JansenДокумент13 страницMecanismo de Theo JansenSergio Aguilar Rico100% (1)
- Analisis de Circuitos, Mallas, Nodos, SuperposicionДокумент3 страницыAnalisis de Circuitos, Mallas, Nodos, SuperposicionSergio Aguilar Rico0% (1)
- Ejercicio Grua Automatica-ManualДокумент2 страницыEjercicio Grua Automatica-ManualSergio Aguilar RicoОценок пока нет
- Actuadores NeumáticosДокумент3 страницыActuadores NeumáticosSergio Aguilar RicoОценок пока нет
- Puerta de GarageДокумент1 страницаPuerta de GarageSergio Aguilar RicoОценок пока нет
- 2 1 Anlisismediantelarectadecarga 120911190913 Phpapp01 PDFДокумент13 страниц2 1 Anlisismediantelarectadecarga 120911190913 Phpapp01 PDFSergio Aguilar RicoОценок пока нет
- Apuntes Analisis de Posicion PDFДокумент26 страницApuntes Analisis de Posicion PDFSergio Aguilar RicoОценок пока нет
- Estándar IEEE 754Документ8 страницEstándar IEEE 754Sergio Aguilar RicoОценок пока нет
- Circuito EquivalenteДокумент3 страницыCircuito EquivalenteSergio Aguilar RicoОценок пока нет
- EEM2 Generadores de Corriente ContinuaДокумент92 страницыEEM2 Generadores de Corriente ContinuaSergio Aguilar Rico100% (2)
- Cuestionariomaquinaselecricasfelipequevedocapitulo2 111201083540 Phpapp01 PDFДокумент12 страницCuestionariomaquinaselecricasfelipequevedocapitulo2 111201083540 Phpapp01 PDFDieguito PinguilОценок пока нет
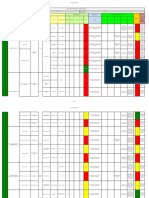
- Iper MontajeДокумент7 страницIper MontajeGabriela Figueroa AguirreОценок пока нет
- Ficha-Practica7-Word Capci Abancay-1Документ6 страницFicha-Practica7-Word Capci Abancay-1JLuisHCarpioОценок пока нет
- Ensayo Otoniel GranadosДокумент1 страницаEnsayo Otoniel GranadosMarianela MasyRubiОценок пока нет
- Lectura BiofísicaДокумент16 страницLectura BiofísicaValentina Rodriguez VargasОценок пока нет
- Triptico Perfume CaseroДокумент4 страницыTriptico Perfume CaseroFranklin Machacuay100% (4)
- Test de Efectividad y Adaptabilidad Del Líder LEADДокумент6 страницTest de Efectividad y Adaptabilidad Del Líder LEADAmarilisis PurisacaОценок пока нет
- Las Sales Minerales BIOДокумент3 страницыLas Sales Minerales BIODaniel Suarez ZambranoОценок пока нет
- El Desdoblamiento y La Derivación NocturnaДокумент4 страницыEl Desdoblamiento y La Derivación NocturnaFank Marino67% (3)
- Curriculum Vitae Rodolfo Garcia Silva Ingeniero Civil Industrial Mayo 2012 PDFДокумент4 страницыCurriculum Vitae Rodolfo Garcia Silva Ingeniero Civil Industrial Mayo 2012 PDFJaviera Soledad Carmona LopezОценок пока нет
- Preguntas Frecuentes - Gestión de Sso MDTДокумент13 страницPreguntas Frecuentes - Gestión de Sso MDTirisОценок пока нет
- Manual Benchmarking.Документ23 страницыManual Benchmarking.Carlos Javier López NavarroОценок пока нет
- Memorias Que Mienten Un PocoДокумент2 страницыMemorias Que Mienten Un PocoFernando GarciaОценок пока нет
- Trastornos de La ExcreciónДокумент22 страницыTrastornos de La ExcreciónBeariz Eliana Villaquiran L. ElivilОценок пока нет
- Tabasco PrimariaДокумент28 страницTabasco PrimariaIsabel ChableОценок пока нет
- Texto ExpositivoДокумент24 страницыTexto ExpositivoDeskartesОценок пока нет
- Asistencia PrenatalДокумент3 страницыAsistencia PrenatalAnahí Adorno GОценок пока нет
- Actividades Por Aniversario.Документ1 страницаActividades Por Aniversario.Wanca Walaśh Richard Gonzalo LimaymantaОценок пока нет
- RIESGO PÚBLICO - Trabajo Actividad 7 ActualizadaДокумент16 страницRIESGO PÚBLICO - Trabajo Actividad 7 ActualizadaDallys Julieth PASTRANA OLARTEОценок пока нет
- Contenido Programatico Preclinica de Estandar 2021-2Документ18 страницContenido Programatico Preclinica de Estandar 2021-2TOMAS DAVID CHICA LLAMASОценок пока нет
- Guillermina Tiramonti - La Escuela en La Encrucijada Del Cambio EpocalДокумент22 страницыGuillermina Tiramonti - La Escuela en La Encrucijada Del Cambio Epocalrubenlab50% (2)
- Ensayo Geografia CuantitativaДокумент18 страницEnsayo Geografia CuantitativaMaria T CondeОценок пока нет
- Comte - Cristina RedaelliДокумент194 страницыComte - Cristina RedaelliMarco Lara HernandezОценок пока нет
- Elementos Del Pensamiento EstratégicoДокумент3 страницыElementos Del Pensamiento EstratégicoJhonny Antonio Concha RamirezОценок пока нет
- Evidencia - 4 - Presentación de Sistemas de AccesoДокумент12 страницEvidencia - 4 - Presentación de Sistemas de AccesoleidyОценок пока нет
- Informe PLANEFAДокумент3 страницыInforme PLANEFARoyer E UstuaОценок пока нет
- Presentacion Owasp Zap y Herramientas ConocidasДокумент7 страницPresentacion Owasp Zap y Herramientas ConocidasWerner Jose Zecena PonceОценок пока нет
- Principio de IdentidadДокумент10 страницPrincipio de IdentidadJeniffer Tixta JeronimoОценок пока нет
- Tema3.desarrolo de Las ActividadesДокумент21 страницаTema3.desarrolo de Las ActividadesEusebio CalvoОценок пока нет
- Guía Evaluada Comprensión LectoraДокумент3 страницыGuía Evaluada Comprensión LectoraMarcela Aravena YañezОценок пока нет
- FARMACOCINÉTICA Part2Документ6 страницFARMACOCINÉTICA Part2Danny DavidОценок пока нет