Вам также может понравиться
- Mathcad - 05-Loads On StaircaseДокумент2 страницыMathcad - 05-Loads On StaircaseMakaraSoyОценок пока нет
- Mathcad - 02-Materials-1Документ6 страницMathcad - 02-Materials-1MakaraSoyОценок пока нет
- Mathcad - 06-Loads On Tile RoofДокумент2 страницыMathcad - 06-Loads On Tile RoofMakaraSoyОценок пока нет
- SteelДокумент2 страницыSteelDara TryОценок пока нет
- Generalized Single-Degree-of-Freedom Systems: Chopra: Prentice-Hall PAGES JUL. 19, 2000 14:21 ICC Oregon (503) 221-9911Документ38 страницGeneralized Single-Degree-of-Freedom Systems: Chopra: Prentice-Hall PAGES JUL. 19, 2000 14:21 ICC Oregon (503) 221-9911MakaraSoyОценок пока нет
- Mathcad - 01-Unit ConversionДокумент2 страницыMathcad - 01-Unit ConversionMakaraSoyОценок пока нет
- Mathcad - 00-2-Table of ContentsДокумент1 страницаMathcad - 00-2-Table of ContentsMakaraSoyОценок пока нет
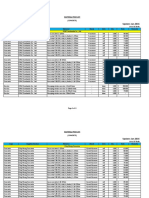
- បណ្តាញទឹក (Plumbing material price list)Документ6 страницបណ្តាញទឹក (Plumbing material price list)semitsuОценок пока нет
- Mathcad - 03-Loads On Structures (Case of Two-Way Slabs)Документ4 страницыMathcad - 03-Loads On Structures (Case of Two-Way Slabs)MakaraSoyОценок пока нет
- Mathcad - 04-Loads On Structures (Case of One-Way Slabs)Документ3 страницыMathcad - 04-Loads On Structures (Case of One-Way Slabs)MakaraSoyОценок пока нет
- Mathcad - 02-MaterialsДокумент6 страницMathcad - 02-MaterialsMakaraSoyОценок пока нет
- បេតុង (Concrete Material Price List)Документ4 страницыបេតុង (Concrete Material Price List)semitsu63% (8)
- Generalized Single-Degree-of-Freedom Systems: Chopra: Prentice-Hall PAGES JUL. 19, 2000 14:21 ICC Oregon (503) 221-9911Документ38 страницGeneralized Single-Degree-of-Freedom Systems: Chopra: Prentice-Hall PAGES JUL. 19, 2000 14:21 ICC Oregon (503) 221-9911MakaraSoyОценок пока нет
- Generalized Single-Degree-of-Freedom Systems: Chopra: Prentice-Hall PAGES JUL. 19, 2000 14:21 ICC Oregon (503) 221-9911Документ38 страницGeneralized Single-Degree-of-Freedom Systems: Chopra: Prentice-Hall PAGES JUL. 19, 2000 14:21 ICC Oregon (503) 221-9911MakaraSoyОценок пока нет
- Generalized Single-Degree-of-Freedom Systems: Chopra: Prentice-Hall PAGES JUL. 19, 2000 14:21 ICC Oregon (503) 221-9911Документ38 страницGeneralized Single-Degree-of-Freedom Systems: Chopra: Prentice-Hall PAGES JUL. 19, 2000 14:21 ICC Oregon (503) 221-9911MakaraSoyОценок пока нет
- 197 256Документ60 страниц197 256MakaraSoy100% (1)
- Generalized Single-Degree-of-Freedom Systems: Chopra: Prentice-Hall PAGES JUL. 19, 2000 14:21 ICC Oregon (503) 221-9911Документ38 страницGeneralized Single-Degree-of-Freedom Systems: Chopra: Prentice-Hall PAGES JUL. 19, 2000 14:21 ICC Oregon (503) 221-9911MakaraSoyОценок пока нет
- 507 592 PDFДокумент86 страниц507 592 PDFMakaraSoyОценок пока нет
- Numerical Methods for Dynamic Response AnalysisДокумент32 страницыNumerical Methods for Dynamic Response AnalysisMakaraSoyОценок пока нет
- 343 400Документ58 страниц343 400MakaraSoyОценок пока нет
- Free Vibration: Chopra: Prentice-Hall PAGES JUL. 19, 2000 14:25 ICC Oregon (503) 221-9911Документ46 страницFree Vibration: Chopra: Prentice-Hall PAGES JUL. 19, 2000 14:25 ICC Oregon (503) 221-9911MakaraSoyОценок пока нет
- Damping in Structures: Part A: Experimental Data and Recommended Modal Damping RatiosДокумент20 страницDamping in Structures: Part A: Experimental Data and Recommended Modal Damping RatiosMakaraSoyОценок пока нет
- Understanding Earthquake Response of Inelastic SystemsДокумент48 страницUnderstanding Earthquake Response of Inelastic SystemsMakaraSoyОценок пока нет
- 343 400Документ58 страниц343 400MakaraSoyОценок пока нет
- 197 256Документ60 страниц197 256MakaraSoy100% (1)
- Generalized Single-Degree-of-Freedom Systems: Chopra: Prentice-Hall PAGES JUL. 19, 2000 14:21 ICC Oregon (503) 221-9911Документ38 страницGeneralized Single-Degree-of-Freedom Systems: Chopra: Prentice-Hall PAGES JUL. 19, 2000 14:21 ICC Oregon (503) 221-9911MakaraSoyОценок пока нет
- Understanding Earthquake Response of Inelastic SystemsДокумент48 страницUnderstanding Earthquake Response of Inelastic SystemsMakaraSoyОценок пока нет
- 065 124Документ60 страниц065 124MakaraSoyОценок пока нет
- Free Vibration: Chopra: Prentice-Hall PAGES JUL. 19, 2000 14:25 ICC Oregon (503) 221-9911Документ46 страницFree Vibration: Chopra: Prentice-Hall PAGES JUL. 19, 2000 14:25 ICC Oregon (503) 221-9911MakaraSoyОценок пока нет
- Response To Arbitrary, Step, and Pulse Excitations: Part A: Response To Arbitrarily Time-Varying ForcesДокумент40 страницResponse To Arbitrary, Step, and Pulse Excitations: Part A: Response To Arbitrarily Time-Varying ForcesMakaraSoyОценок пока нет
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5783)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (119)
- Birational Geometry Caucher Birkar PDFДокумент35 страницBirational Geometry Caucher Birkar PDFhuangrj9Оценок пока нет
- Ap Biology Equations and Formulas SheetДокумент2 страницыAp Biology Equations and Formulas Sheetapi-286357921Оценок пока нет
- 11 Material ModelingДокумент16 страниц11 Material ModelingradhakrishnanОценок пока нет
- Ee360 13 1Документ19 страницEe360 13 1Rawad SalemОценок пока нет
- Mathematics: Quarter 1 - Module 6Документ27 страницMathematics: Quarter 1 - Module 6Kate Mariel FajutaganaОценок пока нет
- Practical PhysicsДокумент329 страницPractical Physicsgangstaq875% (8)
- Computer Science Important Question For Class 12 C++Документ24 страницыComputer Science Important Question For Class 12 C++Ravi singhОценок пока нет
- Tuning With MegaLogViewer VE Analysis PDFДокумент4 страницыTuning With MegaLogViewer VE Analysis PDFkaesar66Оценок пока нет
- Lab 6 - Potentiometer & Servo MotorДокумент7 страницLab 6 - Potentiometer & Servo MotorChristy CheriyanОценок пока нет
- Vissim 8 - Manual PDFДокумент933 страницыVissim 8 - Manual PDFamaulaniОценок пока нет
- Richard Swedberg - Social Mechanisms PDFДокумент353 страницыRichard Swedberg - Social Mechanisms PDFgiovaniОценок пока нет
- MATH Final Exam Review SheetДокумент6 страницMATH Final Exam Review SheetEbrahim ShahidОценок пока нет
- Relations For 1D Bedload Transport: D RGD Q QДокумент17 страницRelations For 1D Bedload Transport: D RGD Q QSamuelErmiyasОценок пока нет
- Report on Quarterly Assessment in Araling PanlipunanДокумент2 страницыReport on Quarterly Assessment in Araling PanlipunanJesus LuckyОценок пока нет
- STEM - BC11LC IIIc 1Документ5 страницSTEM - BC11LC IIIc 1ALJON TABUADAОценок пока нет
- Fried BergДокумент3 страницыFried BergneedmyscribdОценок пока нет
- Support axial loads with thrust bearingsДокумент18 страницSupport axial loads with thrust bearingsReyОценок пока нет
- Experienced Electrical Engineer resumeДокумент2 страницыExperienced Electrical Engineer resumeManan AryaОценок пока нет
- Beach Profile Analysis ExerciseДокумент4 страницыBeach Profile Analysis ExerciseEduardo CervantesОценок пока нет
- Quantitative Finance: 1 Probability and StatisticsДокумент2 страницыQuantitative Finance: 1 Probability and StatisticsVidaup40Оценок пока нет
- Mmw-Unit 1Документ7 страницMmw-Unit 1Ella DimlaОценок пока нет
- Programming Fundamentals Assignment SolutionsДокумент10 страницProgramming Fundamentals Assignment Solutionsali anwarОценок пока нет
- Droplet Evaporation With Reference To The Effectiveness of Water Mist CoolingДокумент9 страницDroplet Evaporation With Reference To The Effectiveness of Water Mist CoolingWhidas PrihantoroОценок пока нет
- RTA Road Design GuideДокумент609 страницRTA Road Design GuideTaiCheong Lee89% (9)
- Calculus 1 with Dr. Janet Semester 1 SyllabusДокумент100 страницCalculus 1 with Dr. Janet Semester 1 SyllabusTrần Xuân QuỳnhОценок пока нет
- Mca Jntu SyllabusДокумент87 страницMca Jntu Syllabusapi-26137287100% (7)
- Survey or Review On Soft Set Theory and DevelopmentДокумент8 страницSurvey or Review On Soft Set Theory and DevelopmentthesijОценок пока нет
- Break and Continue MCQ AnsДокумент11 страницBreak and Continue MCQ Ansnancy_007Оценок пока нет
- Sample 50436Документ16 страницSample 50436Kunal SumukОценок пока нет
- Screen Capacity PaperДокумент44 страницыScreen Capacity PaperJuan FernándezОценок пока нет