Вам также может понравиться
- Assignment Mod2Документ4 страницыAssignment Mod2Rock V2Оценок пока нет
- Solutions of Practice Questions: R X y y XДокумент40 страницSolutions of Practice Questions: R X y y XJibran HayatОценок пока нет
- Problem Set 2 Solutions Math 120: 1 K A 1 K 1 K 1 K 1 K 1 K 1 K 1 K AДокумент5 страницProblem Set 2 Solutions Math 120: 1 K A 1 K 1 K 1 K 1 K 1 K 1 K 1 K Ajulian97Оценок пока нет
- Higher Order Interpolation and QuadratureДокумент12 страницHigher Order Interpolation and QuadratureTahir AedОценок пока нет
- Math 430 Problem Set 3 SolutionsДокумент4 страницыMath 430 Problem Set 3 SolutionsRoshidul IslamОценок пока нет
- Lecture2Notes-MAT 3200 by DR Chileshe.Документ12 страницLecture2Notes-MAT 3200 by DR Chileshe.SKETCHILY SEBENTE100% (1)
- Math 121A: Midterm 1 Solutions: AnswerДокумент5 страницMath 121A: Midterm 1 Solutions: AnswercfisicasterОценок пока нет
- Express The Following As A Product of Disjoint Cycles, Then Compute Its Order.Документ9 страницExpress The Following As A Product of Disjoint Cycles, Then Compute Its Order.Nehal AnuragОценок пока нет
- Complex Numbers DetailedДокумент51 страницаComplex Numbers Detailedkamran khanОценок пока нет
- Relations: Cartesian Products and RelationsДокумент16 страницRelations: Cartesian Products and RelationsSUJAL GUPTAОценок пока нет
- Complex AnalysisДокумент4 страницыComplex AnalysisFᴀᴅʜɪʟОценок пока нет
- MSO202Lect1 PDFДокумент21 страницаMSO202Lect1 PDFab4azizОценок пока нет
- Homework 2 Dihedral Group SubgroupsДокумент4 страницыHomework 2 Dihedral Group SubgroupsNicholas YeeОценок пока нет
- Exercises On Double IntegralsДокумент5 страницExercises On Double IntegralsdyahshalindriОценок пока нет
- MODULE 3 Mathematics in The Modern World GNED 03 BSCPE & BSEE 101Документ11 страницMODULE 3 Mathematics in The Modern World GNED 03 BSCPE & BSEE 101Harold Q SolisОценок пока нет
- Markov Chains For The RISK Board Game RevisitedДокумент8 страницMarkov Chains For The RISK Board Game RevisitedDaniel DehnelОценок пока нет
- V070303SДокумент36 страницV070303SAbdul LugoОценок пока нет
- L /L /L /L: 3. 3A. Double Integrals in Rectangular CoordinatesДокумент4 страницыL /L /L /L: 3. 3A. Double Integrals in Rectangular CoordinatesShaip DautiОценок пока нет
- MT4 2016 Exam FinalДокумент7 страницMT4 2016 Exam Finalzcap excelОценок пока нет
- Allen: Final Jee-Main Examination - August, 2021Документ3 страницыAllen: Final Jee-Main Examination - August, 2021K DHANALAKSHMI K DHANALAKSHMIОценок пока нет
- Math14 - Abstract Algebra Lecture Note: Lesson No. 2: Factor (Quotient) GroupsДокумент4 страницыMath14 - Abstract Algebra Lecture Note: Lesson No. 2: Factor (Quotient) GroupsAbegail VillanuevaОценок пока нет
- Mce647 3p5Документ13 страницMce647 3p5Abdelaziz IderОценок пока нет
- Exam - 2011 - (Solutions)Документ5 страницExam - 2011 - (Solutions)Raymond LongОценок пока нет
- Formula - Engg Maths 1 PDFДокумент7 страницFormula - Engg Maths 1 PDFDhananjayОценок пока нет
- Math 122 Final Exam: Roman BerensДокумент9 страницMath 122 Final Exam: Roman Berenslawrenceofarabia1357Оценок пока нет
- Tarun Kumar Bandyopadhyay, Department of Mathematics: (1) Classical Algebra-S.K.MapaДокумент31 страницаTarun Kumar Bandyopadhyay, Department of Mathematics: (1) Classical Algebra-S.K.Mapasujan chakraborty67% (3)
- A New Fast Computation of A PermanentДокумент10 страницA New Fast Computation of A PermanentAlex LaiknОценок пока нет
- Complex Analytic FunctionsДокумент8 страницComplex Analytic FunctionsMelindaОценок пока нет
- Complex FunctionsДокумент102 страницыComplex FunctionsRajesh100% (1)
- Math 132 Complex NumbersДокумент13 страницMath 132 Complex NumbersHope MeemeОценок пока нет
- Math 356 Abstract Algebra Midterm I (Due 5pm February 21st, 2003)Документ7 страницMath 356 Abstract Algebra Midterm I (Due 5pm February 21st, 2003)kvanps_kumarОценок пока нет
- Functions and RelationsДокумент8 страницFunctions and RelationsPlacido BucyayОценок пока нет
- Lecture08 StudentДокумент20 страницLecture08 Student112304025Оценок пока нет
- Lecchap2 PDFДокумент65 страницLecchap2 PDFVanessa NacarОценок пока нет
- Homework 5 SolutionsДокумент5 страницHomework 5 SolutionsAyan MukherjeeОценок пока нет
- Symmetric Group ANSWERSДокумент4 страницыSymmetric Group ANSWERSmichael turksonОценок пока нет
- Group Representations of Su 2 and So 3Документ12 страницGroup Representations of Su 2 and So 3api-273667257Оценок пока нет
- Jee-Mains Test Paper - 04Документ20 страницJee-Mains Test Paper - 04Apex InstituteОценок пока нет
- Vector & Basic Maths - Practice Sheet - JEE Ultimate Crash Course 2024Документ5 страницVector & Basic Maths - Practice Sheet - JEE Ultimate Crash Course 2024Comical comicОценок пока нет
- Practice Questions 23 To 45Документ48 страницPractice Questions 23 To 45Abdul Razzaq Zahid GhumanОценок пока нет
- Z-TRANSFORMS & DIFFERENCE EQUATIONS GUIDEДокумент8 страницZ-TRANSFORMS & DIFFERENCE EQUATIONS GUIDEvidya_sagar826Оценок пока нет
- Chapter 3 - Multiple IntegralДокумент56 страницChapter 3 - Multiple IntegralTuan Jalai100% (1)
- KCET-2014-Set-A-1 Math QuestionsДокумент75 страницKCET-2014-Set-A-1 Math QuestionsYashwanth.C.P Yashwanth PrasannaОценок пока нет
- NIMCET MCA Entrance 2011 Solved Question PaperДокумент12 страницNIMCET MCA Entrance 2011 Solved Question PaperArnabОценок пока нет
- Engineering Mathematics Complex Numbers 2Документ62 страницыEngineering Mathematics Complex Numbers 2RagulAN100% (1)
- A10 - Chap08A ExproДокумент68 страницA10 - Chap08A Expro蔡易斈Оценок пока нет
- Long Test 3-16112021Документ6 страницLong Test 3-16112021Anurag TiwariОценок пока нет
- Group Theory IIДокумент36 страницGroup Theory IINov IndaОценок пока нет
- Maths Smart Session With Annotations (1)Документ349 страницMaths Smart Session With Annotations (1)Harsh RanjanОценок пока нет
- Comparison in Complex NumbersДокумент20 страницComparison in Complex NumbersSiddharth PrabhakarОценок пока нет
- New Theory of GravitationДокумент12 страницNew Theory of GravitationkeitabandoОценок пока нет
- On The Computation of The Euler Constant: ArticleДокумент16 страницOn The Computation of The Euler Constant: ArticleQuyền NguyễnОценок пока нет
- Statistical Entropy of de Sitter Space (1126-6708 - 1998 - 02 - 014) (MaldacenaJuan, StromingerAndrew 1998 6p)Документ6 страницStatistical Entropy of de Sitter Space (1126-6708 - 1998 - 02 - 014) (MaldacenaJuan, StromingerAndrew 1998 6p)prp.valentinoОценок пока нет
- Jee Advanced 2018 Top 10 Ranks Mathematics QuestionsДокумент15 страницJee Advanced 2018 Top 10 Ranks Mathematics QuestionschandraОценок пока нет
- Chapter 3 Part 1 CountingДокумент16 страницChapter 3 Part 1 Countingabcd1234ff44Оценок пока нет
- Mat1341 TT2 2010WДокумент4 страницыMat1341 TT2 2010WexamkillerОценок пока нет
- Hw2 Solutions Section 16 13 Let G Be The Additive Group of RealДокумент5 страницHw2 Solutions Section 16 13 Let G Be The Additive Group of RealSumanta MannaОценок пока нет
- Math 108 LE2 Samplex SolutionsДокумент5 страницMath 108 LE2 Samplex SolutionsSamuel SalacupОценок пока нет
- Tables of the Function w (z)- e-z2 ? ex2 dx: Mathematical Tables Series, Vol. 27От EverandTables of the Function w (z)- e-z2 ? ex2 dx: Mathematical Tables Series, Vol. 27Оценок пока нет
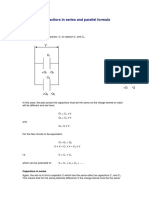
- TAP 127-1: Formulas for capacitors in series and parallelДокумент2 страницыTAP 127-1: Formulas for capacitors in series and parallelPinaki NayakОценок пока нет
- Ho 12Документ8 страницHo 12Pinaki NayakОценок пока нет
- VERY VERY - On Virtual Displacement and Virtual Work in Lag Rang Ian DynamicsДокумент12 страницVERY VERY - On Virtual Displacement and Virtual Work in Lag Rang Ian DynamicsahsbonОценок пока нет
- Vvedensky D.-Group Theory in Physics (2001)Документ158 страницVvedensky D.-Group Theory in Physics (2001)Joe Doe0% (1)
- MATLAB Communication Toolbox PrimerДокумент344 страницыMATLAB Communication Toolbox PrimerchalimisОценок пока нет
- Mission:: Program Development Life Cycle (PDLC) Problem Solving Concepts (Part 2)Документ3 страницыMission:: Program Development Life Cycle (PDLC) Problem Solving Concepts (Part 2)NARVENESH A L GEVARATNAMОценок пока нет
- 2015 Competition CTWДокумент60 страниц2015 Competition CTWXtrayasasasazzzzzОценок пока нет
- Pit OptimisationДокумент6 страницPit OptimisationJuan Pablo Henríquez ValenciaОценок пока нет
- CFG Removal of Null and Unit ProductionДокумент31 страницаCFG Removal of Null and Unit ProductionAcne TerminatorОценок пока нет
- Shear Capacity of Circular Concrete SectionsДокумент14 страницShear Capacity of Circular Concrete Sectionspatricklim1982Оценок пока нет
- HW 1 SolnДокумент3 страницыHW 1 Solngooseneck06Оценок пока нет
- Module02 ClassNotesДокумент43 страницыModule02 ClassNotesGeay PeterОценок пока нет
- BSIT New Curriculum 18 19 UpdatedДокумент2 страницыBSIT New Curriculum 18 19 UpdatedJaaseia Gian AbenojaОценок пока нет
- Advanced Programme Maths P1 2019Документ8 страницAdvanced Programme Maths P1 2019Jack WilliamsОценок пока нет
- Elevator SystemДокумент6 страницElevator SystemEdna Moreno100% (1)
- Transformation Geometry: Mark Scheme 1Документ6 страницTransformation Geometry: Mark Scheme 1anwar hossainОценок пока нет
- 68HC11 Assembly ProgrammingДокумент50 страниц68HC11 Assembly ProgrammingAmine EssakenОценок пока нет
- Fourier Series Formulas in PDFДокумент5 страницFourier Series Formulas in PDFBilly BlattОценок пока нет
- Podar International School (Icse) Practice Sheet STD: X Chapter: 4 Linear Inequations Subject: MathematicsДокумент2 страницыPodar International School (Icse) Practice Sheet STD: X Chapter: 4 Linear Inequations Subject: Mathematicspravingosavi1011_578Оценок пока нет
- Supervised Control of Discrete-Event Dynamic SystemsДокумент13 страницSupervised Control of Discrete-Event Dynamic SystemsMiguelОценок пока нет
- Chapter 005 Cost Behavior AnalysisДокумент153 страницыChapter 005 Cost Behavior AnalysisKim NgânОценок пока нет
- Heat Transfer Revision NotesДокумент11 страницHeat Transfer Revision NotesAnonymous vRpzQ2BLОценок пока нет
- Transformations (Solution)Документ12 страницTransformations (Solution)Amman ButtОценок пока нет
- Ass ITMДокумент13 страницAss ITMAbdul WajidОценок пока нет
- APT cnc2Документ65 страницAPT cnc2Sabiha Hajdarbegović-HafizovićОценок пока нет
- 2013 Book SelectedTopicsInNonlinearDynamДокумент481 страница2013 Book SelectedTopicsInNonlinearDynamYahia ACHOURОценок пока нет
- 40 Puzzles and Problems in Probability and Mathematical StatisticsДокумент5 страниц40 Puzzles and Problems in Probability and Mathematical StatisticsChin Lip SohОценок пока нет
- Pre-Calculus: Quarter 1 - ModuleДокумент21 страницаPre-Calculus: Quarter 1 - ModuleJessa Varona JauodОценок пока нет
- Beams On Elastic FoundationДокумент20 страницBeams On Elastic FoundationShashi Bhushan KumarОценок пока нет
- Sample - Solution Manual Diffusion, Mass Transfer in Fluid Systems 3rd Edition E. L. CusslerДокумент10 страницSample - Solution Manual Diffusion, Mass Transfer in Fluid Systems 3rd Edition E. L. CusslerGlasst Innovacion 2019Оценок пока нет
- Borgomano Et Al 2013Документ37 страницBorgomano Et Al 2013Francois FournierОценок пока нет
- Training Report On Machine LearningДокумент27 страницTraining Report On Machine LearningBhavesh yadavОценок пока нет
- Signal WB CompleteДокумент946 страницSignal WB CompleteSahil SrivastavaОценок пока нет
- Civil Engineering - Surveying Multiple Choice Questions and Answers - Preparation For EngineeringДокумент15 страницCivil Engineering - Surveying Multiple Choice Questions and Answers - Preparation For EngineeringMukesh Kumar64% (11)