Вам также может понравиться
- Passive and Discrete Circuits: Newnes Electronics Circuits Pocket Book, Volume 2От EverandPassive and Discrete Circuits: Newnes Electronics Circuits Pocket Book, Volume 2Оценок пока нет
- Diode, Transistor & Fet Circuits Manual: Newnes Circuits Manual SeriesОт EverandDiode, Transistor & Fet Circuits Manual: Newnes Circuits Manual SeriesРейтинг: 4.5 из 5 звезд4.5/5 (7)
- Basic Electronics GuideДокумент101 страницаBasic Electronics GuideShia Yee KeongОценок пока нет
- Q4 Week 1-3Документ12 страницQ4 Week 1-3Gerome TongolОценок пока нет
- Basic Electronics Laboratory LatestДокумент54 страницыBasic Electronics Laboratory LatestBhargobi RoyОценок пока нет
- Electrical BasicsДокумент24 страницыElectrical BasicsSnehal Mane100% (1)
- BEKO K5 ChassisДокумент46 страницBEKO K5 Chassisf17439Оценок пока нет
- 3rd Semester Lab 201Документ36 страниц3rd Semester Lab 201Noor HussainОценок пока нет
- Physics Class 12 (Activity Notes)Документ12 страницPhysics Class 12 (Activity Notes)HARI KRISHNANОценок пока нет
- Electronic Devices Circuits (Edc) Laboratory Manual: For Ii / Iv B.E (Ece) : I - SemesterДокумент80 страницElectronic Devices Circuits (Edc) Laboratory Manual: For Ii / Iv B.E (Ece) : I - SemesterDominic BoseОценок пока нет
- Electronic Workshop EceДокумент64 страницыElectronic Workshop EceKumar TejОценок пока нет
- 1 - 4 CSE Odd Sem 19.08.2019.Doc.XДокумент43 страницы1 - 4 CSE Odd Sem 19.08.2019.Doc.XNagarjun ReddyОценок пока нет
- SDI204S02 Magnefix Short Circuit Indicator Brochure 3994 074A PDFДокумент8 страницSDI204S02 Magnefix Short Circuit Indicator Brochure 3994 074A PDFPradeep RajanОценок пока нет
- Exp 7-Clipper ClamperДокумент3 страницыExp 7-Clipper ClamperNidhish Milind SonavaleОценок пока нет
- Circuitos Rectificadores: Practica #6Документ5 страницCircuitos Rectificadores: Practica #6Juan Diego MaitaОценок пока нет
- Electronics Lab 2019Документ37 страницElectronics Lab 2019Noor HussainОценок пока нет
- Experiment 1Документ17 страницExperiment 1Eng.Mohammed ReyadОценок пока нет
- Electric Circuits Lab ManualДокумент106 страницElectric Circuits Lab ManualVelan PrintersОценок пока нет
- Electronics I Lab. ECE 201Документ40 страницElectronics I Lab. ECE 201ajf3215Оценок пока нет
- BEG 122 Basic Electronics Engineering 3 (2+1) Practicals List of ExperimentsДокумент1 страницаBEG 122 Basic Electronics Engineering 3 (2+1) Practicals List of ExperimentssivaОценок пока нет
- EE3204 Industrial Automation and System Design - Lab Practical 1Документ10 страницEE3204 Industrial Automation and System Design - Lab Practical 1en91382Оценок пока нет
- Engineering Practices Laboratory (GE8261) : Lab ManualДокумент31 страницаEngineering Practices Laboratory (GE8261) : Lab Manualjoker gamingОценок пока нет
- Electronic Circuit Devices - Frank HarrisДокумент284 страницыElectronic Circuit Devices - Frank Harrisnglok100% (1)
- SD Lab Manual 17.3.22Документ67 страницSD Lab Manual 17.3.22ParthaSarathyОценок пока нет
- 1 - Schematic DiagramsДокумент32 страницы1 - Schematic DiagramsAgustina Gutierrez PariОценок пока нет
- 1 Electronic SymbolsДокумент33 страницы1 Electronic SymbolsOnil Alex VeranoОценок пока нет
- Electronics ComponentsДокумент51 страницаElectronics ComponentsMarlon AranasОценок пока нет
- Electronic Devices Circuits (Edc) Laboratory Manual: For Ii / Iv B.E (Ece) : I - SemesterДокумент50 страницElectronic Devices Circuits (Edc) Laboratory Manual: For Ii / Iv B.E (Ece) : I - SemesterGopalakrishna Murthy C RОценок пока нет
- Ec8311 Eee El Even Iiise LabmanualДокумент101 страницаEc8311 Eee El Even Iiise LabmanualSanjayОценок пока нет
- Hand Book Revised 1Документ269 страницHand Book Revised 1Neelakandan Masilamani100% (1)
- 1 DC System DC AC Circuit at The Sub StationДокумент19 страниц1 DC System DC AC Circuit at The Sub Stationapi-258852000% (1)
- Electronics Device Circuit Lab SheetДокумент27 страницElectronics Device Circuit Lab Sheetjimfinch512Оценок пока нет
- Slides Lec 1-2Документ26 страницSlides Lec 1-2ali tariqОценок пока нет
- 2basic Electronics LabДокумент28 страниц2basic Electronics LabSriОценок пока нет
- Diode Rectifier: Am Sokchea, PHDДокумент16 страницDiode Rectifier: Am Sokchea, PHDអ្នកប្រម៉ាញ់រឿង Spoiler MediaОценок пока нет
- Activity 1 - Identification0001Документ6 страницActivity 1 - Identification0001Lalchandsahani SahaniОценок пока нет
- Redacted For Privacy: (Degree) / (Major) TitleДокумент54 страницыRedacted For Privacy: (Degree) / (Major) TitleChandrashekhar KulkarniОценок пока нет
- Clippers and Clampers LabДокумент21 страницаClippers and Clampers LabballDISCOVERIES PHballDISCOVERIESОценок пока нет
- 15EI251L E&ilap ManualДокумент56 страниц15EI251L E&ilap ManualAnushka TantiaОценок пока нет
- Power Electronics NotesДокумент264 страницыPower Electronics NotesFrost A100% (1)
- Owe's BridgeДокумент7 страницOwe's BridgeTajatОценок пока нет
- 12.7 Service ManualДокумент20 страниц12.7 Service Manualadi_samaОценок пока нет
- Cece 1101 FinalДокумент61 страницаCece 1101 Finalsaketh.s.tandigeОценок пока нет
- Lect 04 Diodes and Applications - Part1Документ71 страницаLect 04 Diodes and Applications - Part1Sebastian GilОценок пока нет
- Power Electronics ch-1 PDFДокумент50 страницPower Electronics ch-1 PDFbelayneh ayichewОценок пока нет
- Sensors Topic GuideДокумент78 страницSensors Topic GuideAmirul ZahariОценок пока нет
- Technical Specifications and Block Diagram of a TV ReceiverДокумент22 страницыTechnical Specifications and Block Diagram of a TV Receiverdancalin64Оценок пока нет
- 12.3 Beko Service ManualДокумент21 страница12.3 Beko Service ManualCaptain444Оценок пока нет
- Ie MCQ 2Документ18 страницIe MCQ 2NJ DegomaОценок пока нет
- Rectifier Troubleshooting: NACE San AntonioДокумент43 страницыRectifier Troubleshooting: NACE San AntonioomarОценок пока нет
- Activity: Apparatus and MaterialДокумент3 страницыActivity: Apparatus and MaterialSHIBAM MANDALОценок пока нет
- 2-1 EDC Lab Manual Jntuk R20 - 201021Документ96 страниц2-1 EDC Lab Manual Jntuk R20 - 201021Durgasaiteja923 SunnyОценок пока нет
- Chapter 1 (LECTURE 1-2) 7208Документ37 страницChapter 1 (LECTURE 1-2) 7208Nuraddeen MagajiОценок пока нет
- Electronic Fundamental(一) 2Документ59 страницElectronic Fundamental(一) 2مهند احمدОценок пока нет
- University Institute of Engineering Department Au-1Документ40 страницUniversity Institute of Engineering Department Au-1Manveer SinghОценок пока нет
- Electronics Workbench Lab 6Документ47 страницElectronics Workbench Lab 6Imran ShaukatОценок пока нет
- Basic Overview of Analog ElectronicsДокумент77 страницBasic Overview of Analog ElectronicsCyprian Mikael CorgedoОценок пока нет
- Lab ManualДокумент28 страницLab ManualVasanth VasanthОценок пока нет
- ActivitiesДокумент4 страницыActivitieslalitadithyas77Оценок пока нет
- Instrumentation and Control Servicing NC IIДокумент88 страницInstrumentation and Control Servicing NC IIVeronica BayaniОценок пока нет
- Op Amp ApplicationsДокумент21 страницаOp Amp ApplicationsMansourCuevasОценок пока нет
- Instrumentation and Control Servicing NC IIДокумент88 страницInstrumentation and Control Servicing NC IIVeronica BayaniОценок пока нет
- RPRT Product Catalog PlantsДокумент15 страницRPRT Product Catalog PlantsMansourCuevasОценок пока нет
- Lecture 5 Path CalculationДокумент10 страницLecture 5 Path CalculationMansourCuevasОценок пока нет
- Engineering Mechanics 2 Review QuestionsДокумент11 страницEngineering Mechanics 2 Review QuestionsMansourCuevasОценок пока нет
- Periscope System: Let D Shorter PathДокумент10 страницPeriscope System: Let D Shorter PathMansourCuevasОценок пока нет
- Satellite CommunicationДокумент25 страницSatellite CommunicationMansourCuevasОценок пока нет
- DC-DC BUCK CONVERTER SIMULATIONДокумент66 страницDC-DC BUCK CONVERTER SIMULATIONMansourCuevasОценок пока нет
- Zig-Zag Grounding Transformer W/Resistor Installation and Maintenance InstructionsДокумент7 страницZig-Zag Grounding Transformer W/Resistor Installation and Maintenance InstructionsabhishekОценок пока нет
- SM6-36 Catalogue PDFДокумент64 страницыSM6-36 Catalogue PDFIda Bagus Yudistira AnggradanaОценок пока нет
- C4300 NPNДокумент4 страницыC4300 NPNTrongtai PhamОценок пока нет
- Pepperl-264860 Eng TdsДокумент2 страницыPepperl-264860 Eng TdsRicards SaulevicsОценок пока нет
- Induction Motor Slip, Speed and Power CalculationsДокумент5 страницInduction Motor Slip, Speed and Power CalculationsSeanОценок пока нет
- Parts Manual: Date Group Fig. 4Документ20 страницParts Manual: Date Group Fig. 4ruslanОценок пока нет
- Thiet Bi Trung The Medium Voltage Products 0416 IntДокумент33 страницыThiet Bi Trung The Medium Voltage Products 0416 IntHồ ThànhОценок пока нет
- SIEMENS Sinamics Gm150 Sm150 Catalog d12!10!2018 enДокумент242 страницыSIEMENS Sinamics Gm150 Sm150 Catalog d12!10!2018 enericallОценок пока нет
- Assessing Transformer Condition with Single-Phase TestsДокумент1 страницаAssessing Transformer Condition with Single-Phase Testsimcoolmailme2Оценок пока нет
- Catalog ATS Osung OsemcoДокумент64 страницыCatalog ATS Osung OsemcoTungОценок пока нет
- S419Документ2 страницыS419Syed IhyaОценок пока нет
- Diagramas Electricos P.V 3ra EdiciónДокумент99 страницDiagramas Electricos P.V 3ra EdiciónNéstor Miranda Marin100% (1)
- Automatic Tranfer Switch: Stationary RangeДокумент3 страницыAutomatic Tranfer Switch: Stationary RangeRakib HasanОценок пока нет
- Siemens 3VL2716 1AA33 0AA0 DatasheetДокумент5 страницSiemens 3VL2716 1AA33 0AA0 DatasheetAriel TorresОценок пока нет
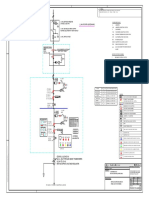
- HT Distribution SLD ModelДокумент1 страницаHT Distribution SLD ModelsomjitsahaniОценок пока нет
- GE Lighting Systems Overview Brochure 12-76Документ4 страницыGE Lighting Systems Overview Brochure 12-76Alan MastersОценок пока нет
- AC To DC Power Conversion IEEEДокумент40 страницAC To DC Power Conversion IEEEvthiyagainОценок пока нет
- MetДокумент2 страницыMetC P RajanОценок пока нет
- CHINT 2018 Electrical Catalog SummaryДокумент18 страницCHINT 2018 Electrical Catalog SummaryMarcelo Rivas VielmaОценок пока нет
- Speed Control of 3ph IMДокумент4 страницыSpeed Control of 3ph IMKrushna PisalОценок пока нет
- Evolis 24kVДокумент76 страницEvolis 24kVPedro MartinsОценок пока нет
- 49-Yamaha G22 (262Y1) Install Sheet-370Документ4 страницы49-Yamaha G22 (262Y1) Install Sheet-370Levi CastorОценок пока нет
- Uninterruptible Power Systems: Brics Series BR 450E/650E/850EДокумент22 страницыUninterruptible Power Systems: Brics Series BR 450E/650E/850EAbdelwhab ElsaftyОценок пока нет
- EET414 Chapter 1 2017Документ33 страницыEET414 Chapter 1 2017Lee Boon HongОценок пока нет
- MINI Contactor 1Документ12 страницMINI Contactor 1Kiran AcharОценок пока нет
- DW01A Battery Protection ChipДокумент5 страницDW01A Battery Protection Chipyewie561Оценок пока нет
- Power Electronics Lab Manual With LogoДокумент69 страницPower Electronics Lab Manual With LogoPunith Gowda M BОценок пока нет
- Spare Part ListДокумент1 страницаSpare Part ListshantaОценок пока нет
- Light Sensor SensorДокумент12 страницLight Sensor SensorshoaibОценок пока нет
- ReneSola - Modelo JC260M-24Bb - 260wattsДокумент2 страницыReneSola - Modelo JC260M-24Bb - 260wattsJediKnight012Оценок пока нет