Вам также может понравиться
- Module-1 Stresses and StrainsДокумент33 страницыModule-1 Stresses and StrainsC.E.M JEFFREYSОценок пока нет
- Mechanics of Deformable BodiesДокумент5 страницMechanics of Deformable BodiesJera Lunar CaliwanaganОценок пока нет
- AST 212 M3 - 2021 - Strength of MaterialsДокумент25 страницAST 212 M3 - 2021 - Strength of MaterialsJessa BadilloОценок пока нет
- Mekanika Kekuatan Material - Kul 1Документ23 страницыMekanika Kekuatan Material - Kul 1lia tyyanОценок пока нет
- Simple Stress & StrainДокумент34 страницыSimple Stress & StrainfaisalasgharОценок пока нет
- Report (MEC214)Документ8 страницReport (MEC214)عبدالله عبيدОценок пока нет
- Stresses in Machine ElementsДокумент18 страницStresses in Machine ElementsthirumalaikumaranОценок пока нет
- GET 208 Lecture Note 1Документ6 страницGET 208 Lecture Note 1Jehu RanyangОценок пока нет
- BTech 1st Sem: Mechanical Science: Stress & StrainДокумент10 страницBTech 1st Sem: Mechanical Science: Stress & StrainTechno India Group100% (1)
- Stresses in Machine MemberДокумент18 страницStresses in Machine MemberK ULAGANATHANОценок пока нет
- 02 - Relationships of Stress and StrainДокумент48 страниц02 - Relationships of Stress and StrainYsaОценок пока нет
- Stress and Strain: Solid Mechanics 1 MECH 0004Документ30 страницStress and Strain: Solid Mechanics 1 MECH 0004Vigil J VijayanОценок пока нет
- Learning Module No. 2 in CVE155Документ9 страницLearning Module No. 2 in CVE155Abdul Mujib T. PANGADAPUNОценок пока нет
- Emg 2303 - 1Документ26 страницEmg 2303 - 1Kemba DonyeОценок пока нет
- SOM Unit I PDFДокумент104 страницыSOM Unit I PDFbhargaviОценок пока нет
- Mechanical Properties of Materials PDFДокумент126 страницMechanical Properties of Materials PDFNazario Emil LintagОценок пока нет
- Chapter-1 Lecture NoteДокумент22 страницыChapter-1 Lecture NoteeyobОценок пока нет
- Unit IДокумент8 страницUnit IPurushothamОценок пока нет
- MoM Summary PointsДокумент39 страницMoM Summary PointsAmmarОценок пока нет
- Notes by Vishwanath Kumar: Learning ObjectivesДокумент38 страницNotes by Vishwanath Kumar: Learning Objectivesprem pravashОценок пока нет
- Behaviour of MaterialsДокумент9 страницBehaviour of MaterialsAkash Kumar DevОценок пока нет
- 1 - What Are The Elastic Constants ?Документ27 страниц1 - What Are The Elastic Constants ?Aliaa ELshabsheryОценок пока нет
- Simple Stress and StrainsДокумент20 страницSimple Stress and StrainsJohn CenaОценок пока нет
- Me 212 Mechanics of Material - I: Credit Hours: Theory 3 Hrs Lab 1 HR Contact Hours: Theory 3 Hrs Lab 3 HrsДокумент22 страницыMe 212 Mechanics of Material - I: Credit Hours: Theory 3 Hrs Lab 1 HR Contact Hours: Theory 3 Hrs Lab 3 HrsKifayat UllahОценок пока нет
- Stress and StrainДокумент14 страницStress and StrainGetachew AbebeОценок пока нет
- Strength of MaterialДокумент6 страницStrength of MaterialhaymanotОценок пока нет
- Full Report Solid MechДокумент19 страницFull Report Solid MechMUHAMMAD ARIFF DYAMIMОценок пока нет
- Theory of Elasticity and Plasticity-RizwanДокумент34 страницыTheory of Elasticity and Plasticity-RizwanMISBAH UL HAQUEОценок пока нет
- Mechanical Properties of Materials ClassNoteДокумент9 страницMechanical Properties of Materials ClassNoteTousik IqbalОценок пока нет
- Week 8 - Stress+StrianДокумент42 страницыWeek 8 - Stress+Strianiwhy_Оценок пока нет
- SOM-Skill Course-1Документ81 страницаSOM-Skill Course-1Rohit RanjanОценок пока нет
- Chapter 1-Stress & StrainДокумент35 страницChapter 1-Stress & StrainMUHAMMAD HAFIZ KAMAL MOHAMAD KAMALОценок пока нет
- Solid Mechanics - Unit 1 NotesДокумент34 страницыSolid Mechanics - Unit 1 NotesBONI TARUNОценок пока нет
- BFC 20903 (Mechanics of Materials) Chapter 1: Stress & StrainДокумент55 страницBFC 20903 (Mechanics of Materials) Chapter 1: Stress & StrainAfif Azhar100% (1)
- Concept of Stresses and StrainДокумент30 страницConcept of Stresses and StrainAshenafi KenaОценок пока нет
- PowerPoint PresentationДокумент65 страницPowerPoint PresentationMRIDUL SINGLAОценок пока нет
- Mechanical Properties of Materials - MechaniCalcДокумент11 страницMechanical Properties of Materials - MechaniCalcharieduidОценок пока нет
- Lecture 2 Stress and StrainДокумент20 страницLecture 2 Stress and Strainحسام النخلانيОценок пока нет
- Lecture Note - Fundamental Concept of Stress & StrainДокумент7 страницLecture Note - Fundamental Concept of Stress & StrainsourovtarofderОценок пока нет
- Direct Strain: Normal Stress Is A Stress That Acts Perpendicular To The AreaДокумент6 страницDirect Strain: Normal Stress Is A Stress That Acts Perpendicular To The AreaRenz BaisaОценок пока нет
- Me 45 Strength of MaterialsДокумент243 страницыMe 45 Strength of MaterialsJhonny Perez Saldaña100% (1)
- Lecture #1 Introduction, Method of Sections: Reading: 1:1-2Документ77 страницLecture #1 Introduction, Method of Sections: Reading: 1:1-2Prashant SunagarОценок пока нет
- Es 28 - Chapter 2Документ43 страницыEs 28 - Chapter 2Angel RemirataОценок пока нет
- Compendium of SomДокумент13 страницCompendium of SomVivek BajpaiОценок пока нет
- Chapter One S.MДокумент46 страницChapter One S.MKebede HaileОценок пока нет
- Utm ProjectДокумент17 страницUtm ProjectRABINDRA NATH NAYAKОценок пока нет
- Loadings and Concept of Normal StressДокумент12 страницLoadings and Concept of Normal StressG. Dancer GhОценок пока нет
- Stress and Strain - Class 1Документ21 страницаStress and Strain - Class 1Ahmad AliyuОценок пока нет
- Stress Strain DiagramДокумент4 страницыStress Strain DiagramMartine CastroОценок пока нет
- CEMEDДокумент10 страницCEMEDRyke Ivan Sab-it BunolnaОценок пока нет
- Strength of Material Interview Question and AnswersДокумент27 страницStrength of Material Interview Question and AnswersArjun M Betageri66% (29)
- Mechanical Properties PDFДокумент57 страницMechanical Properties PDFvardhaОценок пока нет
- Unit 1 Consolidated-1Документ16 страницUnit 1 Consolidated-1vijayakumarОценок пока нет
- Mos - 2130003 - by H N PatelДокумент84 страницыMos - 2130003 - by H N PatelHemantchandra PatelОценок пока нет
- Strength of MTRL Chap1&2Документ25 страницStrength of MTRL Chap1&2Abraham DerejeОценок пока нет
- Loadings and Aspects of Structural Theory Relating To BuildingsДокумент9 страницLoadings and Aspects of Structural Theory Relating To Buildingspkimani10098Оценок пока нет
- Ariola Stress and StrainДокумент2 страницыAriola Stress and StrainRose Andreih AriolaОценок пока нет
- Pioneers of MGMTДокумент18 страницPioneers of MGMTJayvee Coliao100% (1)
- Cpen 106: Project ManagementДокумент14 страницCpen 106: Project ManagementJayvee ColiaoОценок пока нет
- Evolution of MGMT TheoryДокумент22 страницыEvolution of MGMT TheoryJayvee ColiaoОценок пока нет
- Proj MGMTДокумент17 страницProj MGMTJayvee ColiaoОценок пока нет
- Explain Half Adder and Full Adder With Truth TableДокумент28 страницExplain Half Adder and Full Adder With Truth TableJayvee ColiaoОценок пока нет
- Ceng - 24: Engineering Economy Present Worth AnalysisДокумент2 страницыCeng - 24: Engineering Economy Present Worth AnalysisJayvee ColiaoОценок пока нет
- CENG 23 - Finals - 1Документ4 страницыCENG 23 - Finals - 1Jayvee ColiaoОценок пока нет
- 1 Transient ResponseДокумент17 страниц1 Transient ResponseJayvee ColiaoОценок пока нет
- Ceng - 24: Engineering Economy: Interest Is The Manifestation of The Time Value of MoneyДокумент7 страницCeng - 24: Engineering Economy: Interest Is The Manifestation of The Time Value of MoneyJayvee ColiaoОценок пока нет
- With The Accelerated Motion of A Body. The Subject Dynamics Will Be Presented Into Two PartsДокумент7 страницWith The Accelerated Motion of A Body. The Subject Dynamics Will Be Presented Into Two PartsJayvee ColiaoОценок пока нет
- Greek ArchitectureДокумент9 страницGreek Architectureapi-316499974Оценок пока нет
- Industrial SafeДокумент74 страницыIndustrial SafeJayvee ColiaoОценок пока нет
- Engineering Mechanics Static PDFДокумент29 страницEngineering Mechanics Static PDFJayvee ColiaoОценок пока нет
- DisasterДокумент7 страницDisasterJayvee ColiaoОценок пока нет
- Safety Management For CpE VIIДокумент14 страницSafety Management For CpE VIIJayvee ColiaoОценок пока нет
- Assignment ManagementДокумент36 страницAssignment ManagementJayvee ColiaoОценок пока нет
- Transistor ApplicationДокумент17 страницTransistor ApplicationJayvee ColiaoОценок пока нет
- Solid Environment: Buen, Luis Jr. O. Gentolia, Mary Cris G. Manlolo, Jenny GДокумент54 страницыSolid Environment: Buen, Luis Jr. O. Gentolia, Mary Cris G. Manlolo, Jenny GJayvee ColiaoОценок пока нет
- Safety File FinalДокумент20 страницSafety File FinalJayvee ColiaoОценок пока нет
- Certificate of Environmental Clearance FeesДокумент2 страницыCertificate of Environmental Clearance FeesJayvee ColiaoОценок пока нет
- Understanding PH MeasurementДокумент10 страницUnderstanding PH MeasurementAnnisa Novita Putri SiregarОценок пока нет
- Thermosensitive Sol-Gel Reversible HydrogelsДокумент15 страницThermosensitive Sol-Gel Reversible HydrogelsnunipostОценок пока нет
- Lab Report 4: Afsana Islam (AFI2) Department of Environmental Science and Management North South UniversityДокумент3 страницыLab Report 4: Afsana Islam (AFI2) Department of Environmental Science and Management North South UniversityMr WatsonОценок пока нет
- VSI Week8 Lecture8 InstAnal 4th Stage Theory 2022Документ30 страницVSI Week8 Lecture8 InstAnal 4th Stage Theory 2022Sozdar ArgoshiОценок пока нет
- What Is ChemistryДокумент26 страницWhat Is ChemistryAnonymousGodiswithyouОценок пока нет
- Advantages and Disadvantages of Nanotechnology 1Документ4 страницыAdvantages and Disadvantages of Nanotechnology 1Thomas Harrold NemiadaОценок пока нет
- Master Thesis SuerbaevaДокумент75 страницMaster Thesis Suerbaevajason manajОценок пока нет
- DAF Recent Advances PaperДокумент10 страницDAF Recent Advances PaperShashi BhushanОценок пока нет
- Preparatory Problems SolutionsДокумент38 страницPreparatory Problems SolutionsĐạt Trần VănОценок пока нет
- Solution StoichДокумент4 страницыSolution Stoichapi-296307501Оценок пока нет
- Report On ICM Project: Rutherford ScatteringДокумент10 страницReport On ICM Project: Rutherford ScatteringSaurabh KumarОценок пока нет
- 02 Fers Resins For Abrasives Fsac05 To CD VersionДокумент32 страницы02 Fers Resins For Abrasives Fsac05 To CD VersionpmalexОценок пока нет
- Biofilm OceanOptics TemplateДокумент83 страницыBiofilm OceanOptics TemplateSatyaki MajumdarОценок пока нет
- Su: Iikar : Total ProteinДокумент4 страницыSu: Iikar : Total Proteinदिपेश राईОценок пока нет
- The Chemistry of Cooking and Cleaning - Ellen RichardsДокумент106 страницThe Chemistry of Cooking and Cleaning - Ellen RichardsSandra Mian100% (2)
- What Is Polymer Chemistry?Документ8 страницWhat Is Polymer Chemistry?ハジャ 咲良Оценок пока нет
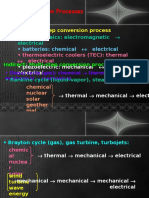
- Energy Conversion ProcessesДокумент15 страницEnergy Conversion Processesimamsakroni048Оценок пока нет
- The Doping Effect On The Intrinsic Ferroelectricity in Hafnium Oxide-Based Nano-Ferroelectric DevicesДокумент8 страницThe Doping Effect On The Intrinsic Ferroelectricity in Hafnium Oxide-Based Nano-Ferroelectric DevicesBiblioteca Campus JuriquillaОценок пока нет
- Instructions PDFДокумент71 страницаInstructions PDFggeorgelОценок пока нет
- ASTM D 323 (Presión de Vapor Reid)Документ11 страницASTM D 323 (Presión de Vapor Reid)Shirley GutierrezОценок пока нет
- Ti Corrosion in AlkalineДокумент10 страницTi Corrosion in AlkalineGeetha ThiruvengadamОценок пока нет
- Cold Crack Criterion For ADC12 Aluminum Alloy Die CastingДокумент6 страницCold Crack Criterion For ADC12 Aluminum Alloy Die CastingVinodОценок пока нет
- Astm D 1353 - NVM PDFДокумент2 страницыAstm D 1353 - NVM PDFVijith Jayakrishnan100% (2)
- 77 EvacuatedU TubeSolarWaterHeating PDFДокумент9 страниц77 EvacuatedU TubeSolarWaterHeating PDFSubash VeluОценок пока нет
- Coa Edta 4naДокумент1 страницаCoa Edta 4nahuythai2011Оценок пока нет
- NanoSteel Technology Overview - Lincoln PDFДокумент74 страницыNanoSteel Technology Overview - Lincoln PDFrajeevkrishna10Оценок пока нет
- CHEM 1067 Lec 3 - 2019 - NJ - 4 PDFДокумент21 страницаCHEM 1067 Lec 3 - 2019 - NJ - 4 PDFIbrahim AliОценок пока нет
- DocДокумент6 страницDocapi-287506055Оценок пока нет
- Week No.2 - CLO-1 Size ReductionДокумент18 страницWeek No.2 - CLO-1 Size ReductionkhalifaОценок пока нет
- Chemistry QuestionsДокумент69 страницChemistry QuestionsChris Pecasales100% (1)