Вам также может понравиться
- Chapter 5 Microwave AntennaДокумент99 страницChapter 5 Microwave AntennaMahendra Singh0% (1)
- Training Documentation - eRAN TDD 13.0 D-MIMO For Cells With Different PCIsДокумент31 страницаTraining Documentation - eRAN TDD 13.0 D-MIMO For Cells With Different PCIsJoan SebastianОценок пока нет
- Moorthy Viva Voce PPT-02!08!14Документ55 страницMoorthy Viva Voce PPT-02!08!14Moorthy GОценок пока нет
- Introduction To SonarДокумент31 страницаIntroduction To SonarzakiannuarОценок пока нет
- Manual Multibeam SonarДокумент23 страницыManual Multibeam SonarAyesha MariyaОценок пока нет
- Design and Deployment of Outdoor Mesh Wireless NetworksДокумент83 страницыDesign and Deployment of Outdoor Mesh Wireless NetworksCisco Wireless100% (2)
- Introduction To Synthetic Aperture Sonar PDFДокумент27 страницIntroduction To Synthetic Aperture Sonar PDFnaivedya_mishraОценок пока нет
- Sonosite Echo Machine Model MicromaxxДокумент100 страницSonosite Echo Machine Model MicromaxxAakshiRajputОценок пока нет
- Introduction To Massive MIMOДокумент33 страницыIntroduction To Massive MIMOturi313Оценок пока нет
- ATL Ultramark 4 Ultrasound System - Service Manual PDFДокумент512 страницATL Ultramark 4 Ultrasound System - Service Manual PDFelectricist100% (1)
- Basic Sonar System (Active) PDFДокумент18 страницBasic Sonar System (Active) PDFthejerskiОценок пока нет
- Reference Signal and UseДокумент28 страницReference Signal and UseManish ChaturvediОценок пока нет
- Sonar (Sound Navigation and Ranging)Документ27 страницSonar (Sound Navigation and Ranging)Ralph Lorenz Hortillosa100% (1)
- Underwater Channel SimulationДокумент55 страницUnderwater Channel SimulationPratheek Praveen KumarОценок пока нет
- A Study On The Design Optimization of An AUV by Using Computational Fluid Dynamic AnalysisДокумент7 страницA Study On The Design Optimization of An AUV by Using Computational Fluid Dynamic AnalysisSalma SherbazОценок пока нет
- Sonar Introduction 2012 Compressed PDFДокумент11 страницSonar Introduction 2012 Compressed PDFBrenno Moura MouraОценок пока нет
- Sonar (Sound Navigation and Ranging) : Principle of An Active Sonar - Send and Return PingsДокумент15 страницSonar (Sound Navigation and Ranging) : Principle of An Active Sonar - Send and Return Pingsmonikajoon29Оценок пока нет
- DRDO SonarДокумент16 страницDRDO SonarRaajeswaran Baskaran100% (1)
- General Facts About The Lidar TechniqueДокумент29 страницGeneral Facts About The Lidar TechniqueCirkuito100% (1)
- Marine Magnetics SeaSPY MagnetometerДокумент4 страницыMarine Magnetics SeaSPY MagnetometerElena GrecuОценок пока нет
- Collapse of Cavitation BubblesДокумент348 страницCollapse of Cavitation BubblesVincent J. CataldiОценок пока нет
- MBES CalibrationДокумент11 страницMBES CalibrationEber MathewОценок пока нет
- 5G BeamformingДокумент88 страниц5G BeamformingMahamod IsmailОценок пока нет
- Underwater Acoustic Noise Measurement of VesselsДокумент6 страницUnderwater Acoustic Noise Measurement of VesselsJohn KaruwalОценок пока нет
- Integrated ASW Suite For Surface VesselsДокумент16 страницIntegrated ASW Suite For Surface Vesselszhang yun100% (1)
- Unmanned Undersea Vehicle (UUV) Sensor Data Formats: Standard Guide ForДокумент11 страницUnmanned Undersea Vehicle (UUV) Sensor Data Formats: Standard Guide ForAhmad Zubair RasulyОценок пока нет
- Training DW PDFДокумент31 страницаTraining DW PDFCeliaZurdoPerladoОценок пока нет
- Mimo SystemДокумент31 страницаMimo Systemhusseinelatar100% (1)
- Submarine Mapping Using Multibeam BathymetryДокумент5 страницSubmarine Mapping Using Multibeam BathymetrySil Alba0% (1)
- Unmanned Underwater Vehicles The Future PDFДокумент15 страницUnmanned Underwater Vehicles The Future PDFPavan KumarОценок пока нет
- Stealth Philosophy, Real SolutionsДокумент10 страницStealth Philosophy, Real SolutionsSunil Kumar P GОценок пока нет
- 1 History: TitanicДокумент24 страницы1 History: TitanicChaitanya VarmaОценок пока нет
- Aplicaciones MilitaresДокумент4 страницыAplicaciones MilitaresMabel NúñezОценок пока нет
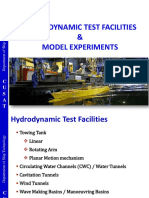
- Hydrodynamic Test Facilities PDFДокумент34 страницыHydrodynamic Test Facilities PDFDarshanОценок пока нет
- Advanced Degaussing SystemsДокумент8 страницAdvanced Degaussing Systemsaks180181Оценок пока нет
- Ocean Eagle 43MHДокумент2 страницыOcean Eagle 43MHB7r100% (1)
- Super Cavitation and Its Application in SubmarinesДокумент22 страницыSuper Cavitation and Its Application in Submarinesaksh2206Оценок пока нет
- 833 Guidance On Reducing Underwater Noise From Commercial ShippingДокумент8 страниц833 Guidance On Reducing Underwater Noise From Commercial Shippinghamid moaieriОценок пока нет
- Defeating The Mine Threat: Peter B NilssonДокумент37 страницDefeating The Mine Threat: Peter B Nilssonahmed mohamedОценок пока нет
- Degaussing SystemДокумент12 страницDegaussing SystemAlchemist_JVC50% (2)
- The 4 - 95 Stirling Engine For Underwater ApplicationДокумент4 страницыThe 4 - 95 Stirling Engine For Underwater ApplicationVladimirDvortsovОценок пока нет
- B.Tech Mid-Term Project Presentation 2012: Ms - Deepani Rath (ECE200963236)Документ18 страницB.Tech Mid-Term Project Presentation 2012: Ms - Deepani Rath (ECE200963236)mahadevkartikОценок пока нет
- Twin Screw PropulsionДокумент1 страницаTwin Screw Propulsionsansun1924Оценок пока нет
- Underwater Acoustic Simulation and Modeling Using MATLABДокумент3 страницыUnderwater Acoustic Simulation and Modeling Using MATLABDeepika ChoudharyОценок пока нет
- Evaluation of em Propagation ModelsДокумент162 страницыEvaluation of em Propagation ModelsoldjanusОценок пока нет
- Advances in Unmanned Underwater Vehicles TechnologДокумент15 страницAdvances in Unmanned Underwater Vehicles TechnologBurak PalaОценок пока нет
- UUV Final Primer FormattedДокумент8 страницUUV Final Primer FormattedJay ZОценок пока нет
- Echo Surveyor VI Flyer PDFДокумент2 страницыEcho Surveyor VI Flyer PDFThomas ThomasОценок пока нет
- Underwater CommunicationДокумент5 страницUnderwater CommunicationBinoy VargheseОценок пока нет
- 12 Propeller CavitationДокумент24 страницы12 Propeller CavitationAbdelrahman Atef ElbashОценок пока нет
- Mine Warfare TrendsДокумент33 страницыMine Warfare TrendsJulia MinnullinaОценок пока нет
- A Brief Taxonomy of Autonomous Under Water Vehicle Design LiteratureДокумент4 страницыA Brief Taxonomy of Autonomous Under Water Vehicle Design Literaturedavid_okahОценок пока нет
- GeoSwath Plus BrochureДокумент16 страницGeoSwath Plus BrochureAhmad Afandi100% (1)
- Hydrographic ReportДокумент22 страницыHydrographic ReportMars EarthlingsОценок пока нет
- Sound WavesДокумент26 страницSound Wavesthinkiit100% (5)
- Sediment Classification Using Side Scan SONARДокумент5 страницSediment Classification Using Side Scan SONARiaetsdiaetsdОценок пока нет
- Seminar Underwater WirelessДокумент21 страницаSeminar Underwater Wirelesszdurga80% (5)
- Proposal of A Groove Cavitator On A Supercavitation PropellerДокумент5 страницProposal of A Groove Cavitator On A Supercavitation PropellerMNirooeiОценок пока нет
- The Alkaline Aluminium Hydrogen Peroxide Semi-Fuel Cell For The Hugin 3000Документ6 страницThe Alkaline Aluminium Hydrogen Peroxide Semi-Fuel Cell For The Hugin 3000Luthfi RaisОценок пока нет
- Generic Sonar SimulatorДокумент1 страницаGeneric Sonar SimulatorIsrael ExporterОценок пока нет
- Basic Wave Theory Review: Graham Warren Bureau of Meteorology AustraliaДокумент33 страницыBasic Wave Theory Review: Graham Warren Bureau of Meteorology Australiarenda tiyarsoОценок пока нет
- Guidelines MultibeamДокумент9 страницGuidelines MultibeamDiego D. MantillaОценок пока нет
- Sonar Processing Project NДокумент23 страницыSonar Processing Project Noman13905Оценок пока нет
- Velocity Probe Work InstructionДокумент9 страницVelocity Probe Work InstructionFranklin HallОценок пока нет
- Theory of TidesДокумент13 страницTheory of TidesbaktinusantaraОценок пока нет
- Talisman UUVДокумент2 страницыTalisman UUVhw606Оценок пока нет
- An Approach To Detect Lofar Lines: Pattern Recognition Le ErsДокумент10 страницAn Approach To Detect Lofar Lines: Pattern Recognition Le ErsBùi Trường GiangОценок пока нет
- An Introduction To Inertial NavigationДокумент37 страницAn Introduction To Inertial NavigationZee ZouОценок пока нет
- Smart Antenna PresentationДокумент45 страницSmart Antenna Presentationማሙየ አይቸው100% (1)
- En - Sensor Libraries Software Pack For STM32CubeДокумент12 страницEn - Sensor Libraries Software Pack For STM32CubeNarjess HEDHLIОценок пока нет
- Mazur Sonar ImplementationДокумент88 страницMazur Sonar Implementationfuller81Оценок пока нет
- Survey of LMS, RLS and SMI Algorithm For Smart Antenna SystemДокумент3 страницыSurvey of LMS, RLS and SMI Algorithm For Smart Antenna SystemKu Mar Sa NdeshОценок пока нет
- Tracking RadarДокумент66 страницTracking RadarOmprakash NarayanaОценок пока нет
- 13.06.2023 Infovista Techm - Mmwave - WPДокумент24 страницы13.06.2023 Infovista Techm - Mmwave - WPPera PericОценок пока нет
- Progress of Phased Array Systems in JapanДокумент10 страницProgress of Phased Array Systems in JapanDhimas AfihandarinОценок пока нет
- The Development of The Multibeam EchosounderДокумент2 страницыThe Development of The Multibeam EchosounderKim Kiki ZaenuriОценок пока нет
- TrendsBeamforming ThomeniusДокумент113 страницTrendsBeamforming ThomeniusMai Thanh SơnОценок пока нет
- Session 2 4beamformingДокумент34 страницыSession 2 4beamformingChetan BhatОценок пока нет
- Mohsin Jamali Resume.Документ20 страницMohsin Jamali Resume.akbisoi1Оценок пока нет
- Adaptive Active Phased - Array 'Multifunction' Radars Seminar Report 03Документ21 страницаAdaptive Active Phased - Array 'Multifunction' Radars Seminar Report 03praveenpv7Оценок пока нет
- 10 1 1 111Документ11 страниц10 1 1 111deb_ashisdОценок пока нет
- Beyond-5G Massive MIMO Equipped With Co-Prime Arrays Using Deep LearningДокумент11 страницBeyond-5G Massive MIMO Equipped With Co-Prime Arrays Using Deep LearningSura MohammedОценок пока нет
- MathWorks - Phased Array System Toolbox™ 1 Getting Started GuideДокумент44 страницыMathWorks - Phased Array System Toolbox™ 1 Getting Started GuideHomero Ruiz HernandezОценок пока нет
- Irs Wtc2020Документ73 страницыIrs Wtc2020Himanshu SinghОценок пока нет
- Chapter TwoДокумент15 страницChapter TwoYounes SalmiОценок пока нет
- TSKS14: Multiple Antenna CommunicationsДокумент23 страницыTSKS14: Multiple Antenna CommunicationsnitishОценок пока нет
- MUY IMPORTANTEEEEEE ENH1350EXT Data Sheet - 180621 - SG - 0Документ8 страницMUY IMPORTANTEEEEEE ENH1350EXT Data Sheet - 180621 - SG - 0Omar PerezОценок пока нет