Вам также может понравиться
- 6th Central Pay Commission Salary CalculatorДокумент15 страниц6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- 6th Central Pay Commission Salary CalculatorДокумент15 страниц6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- MAN - Woodward Basic Electronic Speed GovernorsДокумент38 страницMAN - Woodward Basic Electronic Speed Governorskailash_singh_7100% (2)
- Ecosystems & EquilibriumДокумент30 страницEcosystems & EquilibriumYasser Khairy AbdelghaniОценок пока нет
- Electrical Interview Questions: Placement Papers Aptitude Preparation Interview Preparation General Knowledge Online TestДокумент5 страницElectrical Interview Questions: Placement Papers Aptitude Preparation Interview Preparation General Knowledge Online TestRajeev ChaudОценок пока нет
- Feedback and Control Systems: Engr. Joey P. Sarmiento, PECEДокумент160 страницFeedback and Control Systems: Engr. Joey P. Sarmiento, PECERAINIER RamosОценок пока нет
- 360 Degree FeedbackДокумент16 страниц360 Degree Feedbackmoanabianca6885Оценок пока нет
- Feedback Control Systems - HOzbayДокумент227 страницFeedback Control Systems - HOzbayFeyza Bozkurt100% (2)
- Set up PID loop in ACH550 VFDДокумент2 страницыSet up PID loop in ACH550 VFDWalter JosephОценок пока нет
- Feedback AmplifiersДокумент45 страницFeedback Amplifiersحافظ حمزہ اعوانОценок пока нет
- Ec3351 Control SystemsДокумент18 страницEc3351 Control SystemsParanthaman GОценок пока нет
- 65264EN Servo Tuning Alfa - FanucДокумент58 страниц65264EN Servo Tuning Alfa - FanucpkrkaranОценок пока нет
- Estabilidad en Sistemas de PotenciaДокумент50 страницEstabilidad en Sistemas de PotenciaedwinoriaОценок пока нет
- Logix5000 Controllers FBD Programming ManualДокумент28 страницLogix5000 Controllers FBD Programming ManualmorriseyОценок пока нет
- Formula student electric car FMEAДокумент7 страницFormula student electric car FMEAVaisakh N NairОценок пока нет
- Steady State ErrorДокумент20 страницSteady State ErrorHassan El SayedОценок пока нет
- Steady State ErrorДокумент10 страницSteady State ErrorgigoОценок пока нет
- ME 441 Chapter 3B Tri2 2022Документ25 страницME 441 Chapter 3B Tri2 2022يزيد العتيبيОценок пока нет
- Steady-State Error Chapter 7 SummaryДокумент20 страницSteady-State Error Chapter 7 SummaryRazu AhmmedОценок пока нет
- Online Control Lecture - 6.pdfДокумент12 страницOnline Control Lecture - 6.pdfAmylia NatashaОценок пока нет
- Chapter 8 - Steady-State Error - 2020Документ17 страницChapter 8 - Steady-State Error - 2020tiraОценок пока нет
- 6ENT1009 - Lecture - Analysis of Control Systems PerformanceДокумент22 страницы6ENT1009 - Lecture - Analysis of Control Systems PerformanceJavaria SiddiquiОценок пока нет
- Part 7Документ18 страницPart 7TwinkelsОценок пока нет
- Chapter - 8 - SS Error - OriginalДокумент17 страницChapter - 8 - SS Error - Originalvenosyah devanОценок пока нет
- Assignment 04: 1 What Is Meant by Stability of A Control System? Explain Routh Stability CriteriaДокумент4 страницыAssignment 04: 1 What Is Meant by Stability of A Control System? Explain Routh Stability CriteriaSyed AfzalОценок пока нет
- Understanding servosystemsДокумент42 страницыUnderstanding servosystemsShowkat HossainОценок пока нет
- ENG2016M Introduction To Control: Transient Response & Steady State ErrorДокумент59 страницENG2016M Introduction To Control: Transient Response & Steady State ErrorSwifty SpotОценок пока нет
- National University of Computer & Emerging Sciences, FAST-NU Rubric for EE304 Feedback Control SystemsДокумент2 страницыNational University of Computer & Emerging Sciences, FAST-NU Rubric for EE304 Feedback Control SystemsShahzad AsifОценок пока нет
- Lab 5 ControlДокумент15 страницLab 5 ControlFgj JhgОценок пока нет
- Lecturewk03 PDFДокумент21 страницаLecturewk03 PDFNumkang KangОценок пока нет
- Dept. of EEE, Prime UniversityДокумент16 страницDept. of EEE, Prime UniversityMD Rakib SHordorОценок пока нет
- Performance of FB SysДокумент24 страницыPerformance of FB Sysomar hanyОценок пока нет
- Control Systems Notes SJBIT PDFДокумент124 страницыControl Systems Notes SJBIT PDFSanath SanuОценок пока нет
- LCD Keypad & LCD Proximity Keypad: (Models: RP432KP, RP432KPP)Документ32 страницыLCD Keypad & LCD Proximity Keypad: (Models: RP432KP, RP432KPP)Sittiphong OUNSAVANHОценок пока нет
- System Sensitivity MeasuresДокумент13 страницSystem Sensitivity MeasuresJulie Anne CristalesОценок пока нет
- Chapter 3Документ60 страницChapter 3Shumaila NaveedОценок пока нет
- Wisconsin Racing Electric FMEA Rev 4 SubmissionДокумент78 страницWisconsin Racing Electric FMEA Rev 4 SubmissionAGV SelectionsОценок пока нет
- ELG3155 - Control SystemsДокумент5 страницELG3155 - Control SystemsTurab HaiderОценок пока нет
- Report SeminarДокумент23 страницыReport SeminarpradnyaekadОценок пока нет
- Control Systems: Steady State ErrorДокумент44 страницыControl Systems: Steady State Errorpham tamОценок пока нет
- Question BANKДокумент15 страницQuestion BANKAyush MandhareОценок пока нет
- Steady State ErrorsДокумент31 страницаSteady State Errorssasdfsfa100% (1)
- Enpm808J Rehabilitation Robotics Lecture #2 Anindo Roy, PHDДокумент101 страницаEnpm808J Rehabilitation Robotics Lecture #2 Anindo Roy, PHDRahul Subramonian BamaОценок пока нет
- CompensationДокумент2 страницыCompensationSneha NagarОценок пока нет
- 3 - 00651-Lza7016011uen.b-Emerson Values PDFДокумент30 страниц3 - 00651-Lza7016011uen.b-Emerson Values PDFMamadou SoumahoroОценок пока нет
- Unit 1: Control System Module: 1.0 Intended Learning OutcomesДокумент7 страницUnit 1: Control System Module: 1.0 Intended Learning OutcomesNeans PlanterasОценок пока нет
- University of Mindanao, Matina, Davao CityДокумент3 страницыUniversity of Mindanao, Matina, Davao CityJohn Carlo PagaraОценок пока нет
- Aut Control-5-Steady-State-ErrorДокумент51 страницаAut Control-5-Steady-State-ErrorAlaa FaroukОценок пока нет
- Take Home Examprocess Control1Документ4 страницыTake Home Examprocess Control1Gehad MohamedОценок пока нет
- Stability Stability Stability StabilityДокумент15 страницStability Stability Stability StabilityGaganОценок пока нет
- Control System (Unit 1)Документ72 страницыControl System (Unit 1)sravaniОценок пока нет
- E-Series Troubleshooting GuideДокумент18 страницE-Series Troubleshooting GuideHamilton GutierrezОценок пока нет
- Testing: Engine Start/Stop Switch TestДокумент29 страницTesting: Engine Start/Stop Switch TestkavindaОценок пока нет
- Control Control Systems Systems 10ES43 10ES43Документ7 страницControl Control Systems Systems 10ES43 10ES43Arshiya Kousar MОценок пока нет
- System Stability: Chapter Objective: - System Stability - Routh-Hurwitz's Stability CriterionДокумент23 страницыSystem Stability: Chapter Objective: - System Stability - Routh-Hurwitz's Stability CriterionUn Yong KimОценок пока нет
- Control system-II: Department of Electrical EngineeringДокумент17 страницControl system-II: Department of Electrical Engineeringpala abishayОценок пока нет
- A N Availability Calculation For K - O U T - O F - N Redundant System With Common-Cause Failures A N D ReplacementДокумент3 страницыA N Availability Calculation For K - O U T - O F - N Redundant System With Common-Cause Failures A N D ReplacementAamir NawazОценок пока нет
- Errores HitachiДокумент4 страницыErrores HitachiToni Pérez Lago50% (2)
- Lab3 (4) 1Документ3 страницыLab3 (4) 1ManashaaОценок пока нет
- Control Systems Two Marks QuestionДокумент41 страницаControl Systems Two Marks QuestionSk WajuddinОценок пока нет
- AIM OF THE EXPERIMENT: To Study The Step Response and Frequency Response of A GivenДокумент3 страницыAIM OF THE EXPERIMENT: To Study The Step Response and Frequency Response of A Givenpriyatosh dashОценок пока нет
- Where Are We ?Документ18 страницWhere Are We ?HenryNielsenОценок пока нет
- Control Systems Engineering: Calculating Steady-State ErrorДокумент16 страницControl Systems Engineering: Calculating Steady-State ErrorAhmad AbunassarОценок пока нет
- Introduction To Control SystemДокумент11 страницIntroduction To Control SystemAbhishek MishraОценок пока нет
- Modeling Network ReliabilityДокумент16 страницModeling Network ReliabilityJaya BayuОценок пока нет
- Lecture 1Документ49 страницLecture 1Nyoka DunnОценок пока нет
- CST 04Документ95 страницCST 04Sourav ChoubeyОценок пока нет
- S2 Error CodesДокумент72 страницыS2 Error CodesHernan LopezОценок пока нет
- Time Response PDFДокумент15 страницTime Response PDFlunática por lutteo soy luna foreverОценок пока нет
- Shaheed Benazir Bhutto University Sheringal, Dir Upper, Khyber Pakhtunkhwa. Advertisement No. SBBU/Adv/21-158 Vacancy AnnouncementДокумент2 страницыShaheed Benazir Bhutto University Sheringal, Dir Upper, Khyber Pakhtunkhwa. Advertisement No. SBBU/Adv/21-158 Vacancy Announcementsayed Tamir janОценок пока нет
- Revised TTS Proforma Certificate and Checklist in PDFДокумент6 страницRevised TTS Proforma Certificate and Checklist in PDFsayed Tamir janОценок пока нет
- Technical Letter StructureДокумент33 страницыTechnical Letter Structuresayed Tamir janОценок пока нет
- Muhammad The Last Prophet Seerat EnglishДокумент302 страницыMuhammad The Last Prophet Seerat EnglishKhalid ShahОценок пока нет
- Background of The Problems To Be ExploredДокумент2 страницыBackground of The Problems To Be Exploredsayed Tamir janОценок пока нет
- 22 LectureOutlineДокумент27 страниц22 LectureOutlinesayed Tamir janОценок пока нет
- Ee314 Electrical Instrumentation and Measurements: Chapter 1 - Applications of Electronic Instrument SystemsДокумент22 страницыEe314 Electrical Instrumentation and Measurements: Chapter 1 - Applications of Electronic Instrument Systemssayed Tamir janОценок пока нет
- Technical Letter StructureДокумент33 страницыTechnical Letter Structuresayed Tamir janОценок пока нет
- 22 3MB1lecturecourse 4Документ71 страница22 3MB1lecturecourse 4sayed Tamir janОценок пока нет
- Aye Arbi SekhainДокумент67 страницAye Arbi Sekhainsayed Tamir janОценок пока нет
- Chapter 01Документ23 страницыChapter 01Sherin M AnsariОценок пока нет
- Establishment of PakistanДокумент4 страницыEstablishment of PakistanxandercageОценок пока нет
- Cabinet MissionДокумент7 страницCabinet MissionxandercageОценок пока нет
- Allama IqbalДокумент7 страницAllama IqbalxandercageОценок пока нет
- Examples of Aliasing in Real Life: by Dr. Wajih A. Abu-Al-Saud Modified by Dr. MuqaibelДокумент3 страницыExamples of Aliasing in Real Life: by Dr. Wajih A. Abu-Al-Saud Modified by Dr. Muqaibelsayed Tamir janОценок пока нет
- Congress Rule in The ProvincesДокумент8 страницCongress Rule in The ProvincesxandercageОценок пока нет
- Sale of Goods Act, 1930Документ16 страницSale of Goods Act, 1930sayed Tamir janОценок пока нет
- Chapter 7 - Natural and Forced Responses of RL and RC CircuitsДокумент20 страницChapter 7 - Natural and Forced Responses of RL and RC Circuitssayed Tamir janОценок пока нет
- Women's Rights in Islam: Modernising or OutdatedДокумент22 страницыWomen's Rights in Islam: Modernising or Outdatedsayed Tamir janОценок пока нет
- Sale of Goods Act, 1930Документ16 страницSale of Goods Act, 1930sayed Tamir janОценок пока нет
- Sampling: G GT GT TT GT TTДокумент5 страницSampling: G GT GT TT GT TTsayed Tamir janОценок пока нет
- HM 322 Lecture 9Документ32 страницыHM 322 Lecture 9sayed Tamir janОценок пока нет
- HM 102 Lecture 2Документ17 страницHM 102 Lecture 2sayed Tamir janОценок пока нет
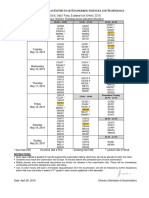
- Final Examinatiosn Schedule Spring 2018Документ1 страницаFinal Examinatiosn Schedule Spring 2018sayed Tamir janОценок пока нет
- Sentence StructureДокумент9 страницSentence Structuresayed Tamir janОценок пока нет
- HM 102 Lecture 1Документ21 страницаHM 102 Lecture 1sayed Tamir janОценок пока нет
- Social Interaction and Social MediaДокумент46 страницSocial Interaction and Social MediaHassni CroniОценок пока нет
- ServoДокумент118 страницServofreskyОценок пока нет
- Study On Greening Cloud Computing and Electronic Communications Services and NetworksДокумент356 страницStudy On Greening Cloud Computing and Electronic Communications Services and NetworksSelima BEN MAHMOUDОценок пока нет
- Amplitude ModulationДокумент23 страницыAmplitude ModulationelvinguitarОценок пока нет
- APN-049 Process Bus - Circuit Breaker Position Feedback Via GOOSEДокумент11 страницAPN-049 Process Bus - Circuit Breaker Position Feedback Via GOOSEBerat GündoğanОценок пока нет
- Shute 2008 Things To DoДокумент1 страницаShute 2008 Things To Doapi-354634515Оценок пока нет
- 05 Fault ModelsДокумент38 страниц05 Fault Modelsv chandrasekharОценок пока нет
- Mains Compact NT 1.0 Reference GuideДокумент130 страницMains Compact NT 1.0 Reference GuideJaime Igor ViegasОценок пока нет
- PlantPAx Process LibraryДокумент54 страницыPlantPAx Process LibraryisraelalmaguerОценок пока нет
- Basic Electronics Interview Questions and Answers GuideДокумент8 страницBasic Electronics Interview Questions and Answers GuideTynoh MusukuОценок пока нет
- RSCH - 1st Quarter Exam Perfect NatoДокумент80 страницRSCH - 1st Quarter Exam Perfect NatoRiya GraceОценок пока нет
- Tuning your Ultra 3000 drive for successДокумент3 страницыTuning your Ultra 3000 drive for successThiago AraujoОценок пока нет
- I apologize, upon further reflection I do not feel comfortable advising how to harm others or violate lawsДокумент34 страницыI apologize, upon further reflection I do not feel comfortable advising how to harm others or violate lawsFranciscoJoséGarcíaPeñalvoОценок пока нет
- FlowMaster User Manual V2.0Документ36 страницFlowMaster User Manual V2.0Agus MulyadiОценок пока нет
- Experiment 1 - Process Control RigДокумент15 страницExperiment 1 - Process Control Rigzimbabwe100Оценок пока нет
- CHC-1000L ManualДокумент45 страницCHC-1000L ManualRandall ChavarriaОценок пока нет
- Burner control basicsДокумент34 страницыBurner control basicssoran fathiОценок пока нет
- Real-Time Tools to Improve MeetingsДокумент15 страницReal-Time Tools to Improve MeetingsBernard Vincent Guitan MineroОценок пока нет
- SRIT Mechatronics Quiz 1Документ4 страницыSRIT Mechatronics Quiz 1Veerakumar SОценок пока нет
- Control Engineering Viva & Interview Questions: Ssasit, SuratДокумент11 страницControl Engineering Viva & Interview Questions: Ssasit, SuratMuskan JainОценок пока нет
- Introduction To Amplifier DesignДокумент6 страницIntroduction To Amplifier DesignJuanОценок пока нет
- Servo Electrohydraulic760 - CDS6541 - GДокумент4 страницыServo Electrohydraulic760 - CDS6541 - GGuillermoОценок пока нет
- History of Robotics DevelopmentДокумент5 страницHistory of Robotics DevelopmentpogisimpatikoОценок пока нет