Академический Документы
Профессиональный Документы
Культура Документы
Visual Programming Language Environment For Different IoT and Robotics Platforms in Computer Science Education
Загружено:
Prabhu PalaniОригинальное название
Авторское право
Доступные форматы
Поделиться этим документом
Поделиться или встроить документ
Этот документ был вам полезен?
Это неприемлемый материал?
Пожаловаться на этот документАвторское право:
Доступные форматы
Visual Programming Language Environment For Different IoT and Robotics Platforms in Computer Science Education
Загружено:
Prabhu PalaniАвторское право:
Доступные форматы
CAAI Transactions on Intelligence Technology
Special Issue: Internet of Things and Intelligent Devices and Services
ISSN 2468-2322
Visual programming language environment Received on 5th December 2017
Revised on 26th January 2018
for different IoT and robotics platforms in Accepted on 31st January 2018
doi: 10.1049/trit.2018.0016
computer science education www.ietdl.org
Gennaro De Luca 1 ✉, Zhongtao Li 2, Sami Mian 1, Yinong Chen 1
1
School of Computing, Informatics, and Decision Systems Engineering, Arizona State University, Tempe, AZ 85287-8809, USA
2
School of Information Science and Engineering, University of Jinan, Shandong, People’s Republic of China
✉ E-mail: gdeluca1@asu.edu
Abstract: This study presents the authors’ recent research and application of a new visual programming language and its
development environment: VIPLE (Visual IoT/Robotics Programming Language Environment) at Arizona State University
(ASU). ASU VIPLE supports a variety of IoT devices and robots based on an open architecture. Based on computational
thinking, VIPLE supports the integration of engineering design process, workflow, fundamental programming concepts,
control flow, parallel computing, event-driven programming, and service-oriented computing seamlessly into a wide
range of curricula, such as introduction to computing, introduction to engineering, service-oriented computing, and
software integration. It is actively used at ASU in several sections of FSE 100: Introduction to Engineering and in
CSE 446: Software Integration and Engineering, as well as in several other universities worldwide.
1 Introduction An autonomous decentralised system (ADS) is a system composed
of decentralised modules or components that are designed to operate
The Internet of Things (IoT) refers to uniquely identifiable objects independently but are capable of interacting with each other to meet
(things) and their virtual representations in an Internet structure the overall goal of the system. ADS components are designed to
[1]. The concept was initially applied in the radio-frequency operate in a loosely coupled manner and data is shared through a
identification tags to mark the Electronic Product Code (Auto-ID content-oriented protocol, where data are not sent to an address,
Lab), which is extended to refer to the systems where physical but sent by a content code. The receivers read the content code
objects are seamlessly integrated into the information network, and and decide if or not to use or to discard the data. This design
where the physical objects can become active participants in paradigm enables the system to continue to function in the event
business processes [2]. The Internet of Intelligent Things (IoIT) of component failures. It also enables maintenance and repair to be
deals with devices that have adequate computing capacity, such as carried out while the system remains operational. Autonomous
a 32-bit processor. Distributed intelligence is a part of the IoIT [3], decentralised systems have a number of applications including
where local computing resources are used to process the data industrial production lines, transportation systems, railway
locally and thus offload the central computing units. According to signalling and robotics applications [9, 10].
Intel’s report, there are 15 billion devices that are connected to the The robot as a Service (RaaS) is a cloud computing unit,
Internet, in which 4 billion devices include 32-bit processing particularly a fogging unit that facilitates the seamless integration
power, which are considered intelligent decides. Among the four of robots and embedded devices into Web and cloud computing
billion intelligent decides, one billion devices are intelligent environments [3, 11]. It follows the service-oriented architecture
systems that are embedded in smart devices [4]. (SOA), and a RaaS unit includes services for performing
The development of cloud computing, fog computing, and edge functionality, a service directory for discovery, and service clients
computing pushed the desktop-based computing platform into an for the user’s direct access [12, 13]. The current RaaS
Internet-based computing infrastructure. It also seamlessly implementation facilitates SOAP and RESTful communications
connects physical devices or things into services. between RaaS units and the other cloud computing units.
In addition to IoT and IoIT, a number of related concepts and Hardware development and interface standards are available to
systems have been proposed to take advantage of the Internet and support RaaS implementation. For example, the Devices Profile
cloud computing. A cyber-physical system (CPS) is a combination for Web Services (DPWS) defines implementation constraints to
of a large computational and communication core and physical enable secure Web Service messaging, discovery, description, and
elements that can interact with the physical world [5–7]. CPSs eventing on resource-constrained devices between Web services
can be considered the extended and decentralised version of and devices. The recent Intel IoT-enabled architectures, such as
embedded systems. In CPSs, the computation and communication Galileo and Edison, make it easy to program these devices as Web
core and the physical elements are tightly coupled and coordinated services. From different perspectives, an RaaS unit can be
to fulfil a coherent mission. Research advances in CPSs considered a unit of the IoT, IoIT (which have adequate
promise to transform our world with these kinds of systems. They computing capacity to perform complex computations [3]), a CPS
can respond more quickly, for example, autonomous collision (which is a combination of a large computation and
avoidance. They are more precise, e.g. robotic surgery and communication core and physical elements that can interact with
nano-tolerance manufacturing. They work in dangerous or the physical world [4]), and an ADS.
inaccessible environments, e.g. autonomous systems for search and This paper uses the concepts of IoIT and Robot as a Service as
rescue, firefighting, and exploration. They provide large-scale, examples to study the programming issues of all the
distributed coordination, e.g. automated traffic control. They are aforementioned systems that are connected to the Internet or can
highly efficient, e.g. zero-net-energy buildings, augment human be accessed through the Internet.
capabilities, and enhance societal wellbeing, for example, assistive On the software development environment side, there are a
technologies and ubiquitous healthcare monitoring and delivery [8]. number of great visual programming environments for education.
CAAI Trans. Intell. Technol., 2018, Vol. 3, Iss. 2, pp. 119–130
This is an open access article published by the IET, Chinese Association for Artificial Intelligence and 119
Chongqing University of Technology under the Creative Commons Attribution License
(http://creativecommons.org/licenses/by/3.0/)
MIT Scratch and MIT App Inventor [14] uses drag-and-drop style runtime. Section 7 discusses the use of VIPLE in the classroom.
puzzles to construct games or phone applications. University of Section 8 concludes the paper.
Virginia and Carnegie Mellon’s Alice is a 3D game and movie
development environment [15]. It uses a drop-down list for users
to select the available functions in a stepwise manner. App 2 VIPLE programming concepts
Inventor and Alice allow novice programmers to develop complex
applications using visual composition at the workflow level. Intel VIPLE provides a platform upon which a variety of computing and
IoT Service Orchestration Layer is Visual/Workflow approach for engineering concepts may be taught. In addition to the IoT and
delivering a robust, extensible, high-quality solution for rapid Robotics topics mentioned, VIPLE is also used to target a variety
creating IoT Apps Work seamlessly with Intel IoT boards, such as of other concepts due to its ease of use and strong parallel and
Galileo and Edison [16]. Microsoft Robotics Developer Studio distributed computing (PDC) support.
(MSRDS) and Visual Programming Language (VPL) are
specifically developed for robotics applications [17]. It was a
milestone in software engineering, robotics, and computer science 2.1 Introduction to the VIPLE runtime
education from many aspects. Microsoft VPL is service-oriented;
it is visual and workflow-based; it is an event-driven; it supports One of the major requirements set forth for VIPLE is a strong
parallel computing, and it is a great educational tool that is simple support for multithreading, event-driven programming, and
to learn and yet powerful and expressive. Sponsored by two robotic/IoT device connectivity. To this end, we developed a new
Innovation Excellence awards from Microsoft Research in 2003 runtime to both accurately meet these requirements and to
and in 2005, Dr. Yinong Chen participated in the early discussion facilitate the expansion of the runtime. The key features of this
of a service-oriented robotics developer environment at Microsoft. runtime include all those discussed in Section 3, such as simple
MSRDS and VPL were immediately adopted at ASU in multithreaded application development with in-built thread safety
developing CSE101 in 2006 as freshman level computer science and support for any open platform IoT or robotic device.
and engineering course. The course grew from 70 students in Fall One of the challenges we faced in developing this runtime was
2006 to over 350 students in 2011. The course was then extended preventing race conditions such as in the maze navigation
to all students in the Ira A. Fulton Schools of Engineering (FSE) algorithm we require students to write. This algorithm makes use
at ASU and was renamed FSE100, which is offered to thousands of two sensors which may receive data at the same time. The
of freshman engineering students now at ASU. The course is also branch of code associated with one sensor may invoke conflicting
adopted in many universities around the world, including China. commands with respect to the other sensor’s branch of code. For
Unfortunately, Microsoft suspended its development and support example, one sensor may request the robot to turn left while the
for MSRDS and VPL in 2014 [18], which leads to our FSE100 other requests a right turn. However, the runtime cannot enforce
course, and many other schools’ courses using VPL, without locks that prevent two blocks of code from running at once, even
further support. Particularly, the existing 2012 version of VPL if only from sensors, as that would conflict with the multithreading
support LEGO NXT, but not the LEGO’s third generation EV3 requirements. Our solution includes the use of locks that are
robot, while the second-generation NXT is off the market. automatically invoked when using global variables in VIPLE. By
To keep our course running and also help the other schools, we having students use such a variable in both sensor threads, the
take the challenge and responsibility to develop our own visual runtime can help coordinate the tasks without the user having to
programming environment at Arizona State University (ASU). We understand exactly how the race condition is prevented.
name this environment VIPLE, standing for Visual IoT/Robotics
Programming Language Environment.
2.2 VIPLE runtime as a service
ASU VIPLE is based on our previous eRobotics development
environments developed in 2012–2014. VIPLE is designed to Developing a custom runtime facilitated the use of the runtime in
support as many features and functionalities of MSRDS and VPL other applications outside of a desktop application. As this runtime
as possible, in order to better serve the MSRDS and VPL has strong support for teaching PDC topics, we have used it for
communities in education and research. To serve this purpose, other related applications. As one example, this runtime allows
VIPLE also keeps a similar user interface, so that the MSRDS and simple development of a web-based interface for VIPLE. Such an
VPL development communities can use VIPLE with little application has several benefits. Students may take applications
additional learning. VIPLE does not replace MSRDS or VPL. they developed on the desktop application and run it on the web
Instead, it extends MSRDS and VPL in their capacities in multiple application. Transferring the application provides an opportunity to
aspects. It can connect to different physical robots, including EV3 teach students the difference between desktop and web-based
and any robots based on off-the-shelf processors. multithreaded application development. One major difference may
VIPLE is a general-purpose programming language and is Turing include support for high-performance computing on the web
complete in its capacity. It can be used for any kind of computational application, as the runtime may be run on a server farm, whereas
tasks. Thus, VIPLE is a perfect language for students to learn their the desktop version is limited to the local computing resources.
first programming languages. VIPLE uses visual programming
style based on drag and drop of existing components and services.
This programming style allows students to focus on the logic, 2.3 VIPLE optimisations
instead of syntax.
This paper is an extension to our previous workshop publication In an effort to improve the performance of VIPLE, a variety of
on Visual IoT/Robotics Programming Language Environment for research was performed to explore the effect of standard and novel
Computer Science Education [19]. More than 70% of the contents optimisation techniques on the VIPLE runtime. These
is now in this paper. The reused parts are mainly the related work optimisations range from the use of thread pools to the use of
and overall system description. covering arrays to provide branch prediction in complex branch
The remaining of the paper is organised as follows. Section 2 activities [20]. Such optimisations are beyond the scope of a
introduces the basic IoT standards, protocols and the stack of the VIPLE program since they are targeted at the runtime. As such,
technologies related to IoT. Section 3 presents the main students are unable to experiment with these changes. However, in
functionalities of ASU VIPLE and how it is used for general upper division classes, we may explain these various optimisations
purpose computing and visually programming IoT and robotics and have the students explore these effects in their own work. The
devices. Section 4 presents an array of examples to show VIPLE use of interesting optimisation techniques such as covering arrays
applications in computer science education. Section 5 discusses has helped to increase student interest and interaction as many of
the interface and connection from VIPLE to IoT devices. Section our classes typically focus on antiquated or trivial optimisation
6 offers a variety of concepts that are taught with VIPLE and its techniques.
CAAI Trans. Intell. Technol., 2018, Vol. 3, Iss. 2, pp. 119–130
120 This is an open access article published by the IET, Chinese Association for Artificial Intelligence and
Chongqing University of Technology under the Creative Commons Attribution License
(http://creativecommons.org/licenses/by/3.0/)
2.4 π-Calculus in VIPLE
To provide a solid foundation to VIPLE and also for the upper
division students suitable skills for the work they do in VIPLE,
VIPLE constructs were defined based on π-calculus [21–23]. We
can represent all possible VIPLE activities in π-calculus, and thus
prove the correctness of VIPLE program using the available
models and tools in the mathematics. The VIPLE constructs
provide a variety of benefits in the teaching process and parallel
computing concepts that exist in π-calculus and thus can teach
these concepts in visual programming. For example, these
constructs help to implement and explain map and reduce concept,
since a typical map reduce application can be represented in
π-calculus using identical constructs. By asking students to write
out the mathematical representation of their VIPLE program, they
can be shown such similarities. Furthermore, this model provides
an opportunity to explore and prove a variety of mathematical and
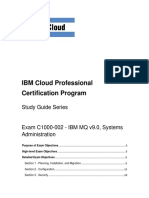
theoretical computing concepts. Fig. 1 lists the basic constructs in
π-calculus, their graphic representations, and the VIPLE activities Fig. 2 IoT: infrastructure below and above
that implement the constructs.
In our theoretical computing courses, students may explore
concepts using the Turing Machine model. Introducing a
π-calculus model allows students to explore other advanced protocols, such as HTTP, TCP, and IP. The data received from
concepts that would be difficult or impossible with Turing the IoT is represented as Web data in forms such as HTML,
Machines. The main difference between the two models is that JSON, XML, and URI. The data can be further organised into
π-calculus focuses more on the connections and interfaces between ontology and presented in RDF, RDFS, and OWL for storing,
various entities [21]. As such, it is possible in many cases to prove analysing, and reasoning. The data is typically processed in
whether their program is structurally equivalent to another Service-oriented and Web-based computing environments. If the
program, if their program can be reduced to a simpler form, and data amount is big, it can be processed by cloud computing and
then how to create the VIPLE program corresponding to that big data analysis. At this end, the IoT and its data are fully
simpler form [21]. integrated into the Web and the virtual world, and all the
technologies and applications developed can be applied to process
IoT data and control the physical world connected to the IoT on
3 IoT standards and protocols the other side.
On the other hand, IoT and IoIT are connected to devices and the
IoT is now a general concept that can be interpreted in different physical world through different device protocols and standards. For
contexts. Different protocols and standards can be used for the example, ADS uses a content-oriented protocol to broadcast data to a
communication between the devices and the Internet. As shown in device bus, and the devices take the data based on a content code,
Fig. 2, the IoT connects to the Internet through the Internet instead of destination address [9, 10]. Any other devices that need
to delay information will pick up the data by content code and
apply the delay information.
The DPWS applies Web service standards in device interface and
communication. It defines implementation constraints to enable
secure Web Service messaging, discovery, description, and
eventing on resource-constrained devices between Web services
and devices [24]. The DPWS specification is built on the
following core Web Services standards: WSDL 1.1, XML
Schema, SOAP 1.2, and WS-Addressing. Initially published in
2004, DPWS 1.1 was approved as an OASIS Standard together
with WS-Discovery 1.1 and SOAP-over-UDP 1.1 2009. The
Microsoft.Net Framework Class Library has defined classes for
supporting DPWS device programming. Devices that implement
DPWS are already on the market. For example, Netduino Plus is
an interface board that wraps a device with a Web service
interface, so that the device can communicate with a virtual thing
(a Web service) without requiring device driver code. The device
is available in major stores, such as Amazon.com.
RaaS applies SOAP and RESTful Web service standards at
the device level, similar to DPWS. However, RaaS extends DPWS
to include the service broker and service clients [3]. The service
broker allows the devices (robots) to register their IP address
once they are online. The registration is necessary, as many of
the devices are connected to the Internet via Wi-Fi, and their IP
addresses are dynamically assigned. Once registered, the devices
can be discovered and connected by looking up the device broker.
As robots can be powerful devices, RaaS allows the robots to
install multiple clients, and the robots can execute a different
client to perform a different set of functions. RaaS also allows the
IoT controller or the robot to be configured as the Wi-Fi router,
allowing multiple applications to connect the device.
In the next section, we will outline the design and implementation
Fig. 1 VIPLE activity constructs in π-calculus of VIPLE and its interface to the Internet and to IoT devices.
CAAI Trans. Intell. Technol., 2018, Vol. 3, Iss. 2, pp. 119–130
This is an open access article published by the IET, Chinese Association for Artificial Intelligence and 121
Chongqing University of Technology under the Creative Commons Attribution License
(http://creativecommons.org/licenses/by/3.0/)
4 VIPLE activities and services One of the major advantages of using VIPLE over Microsoft VPL
is the support for any device with an open platform. To connect to a
The basic building blocks of an ASU VIPLE program (diagram) are generic device with Microsoft VPL, DSS services written
listed and explained in Fig. 3. They offer a complete set of activities specifically for MRDS must be added to the VPL service list. In
described in process control theory, such as π-Calculus [20, 21]. VIPLE, any robot that follows the standard JSON interface will
One of the main development goals with VIPLE is the usability of work with the services currently offered. In addition to greater
the language. To this end, a variety of library functions and services robot support, VIPLE offers access to a variety of web services.
are made available in addition to the standard language functions. As many Web applications make use of RESTful services, VIPLE
These functions and services are split into three sets, as shown in can access a wide range of resources. Instead of the generic robot
Fig. 4. services offered by Microsoft VPL, VIPLE offers several simulator
The first set of services contains the ‘General Purpose Services’. unique services that allow significantly quicker prototyping of
These services include general input and output services, general algorithms for IoT devices and robots.
event services, and other various services to facilitate application In the next section, we will use educational examples to
development. The user may also add services to this section, demonstrate the functions and applications of ASU VIPLE.
including VIPLE services (created from a Custom Activity) and
WSDL services.
The second set of services contains the ‘Robot/IoT Services’. 5 IoT and robotics platforms
These services allow reading and writing of data on devices which
offer an open-standard interface. VIPLE supports a variety of A number of robot units have been implemented based on different
communication protocols, including WebSocket, TCP, UDP, and hardware platforms, as shown in Fig. 5.
Bluetooth. To facilitate the use of new devices with VIPLE, a
standard interface is defined in JSON that allows specification of
the various services offered by the IoT device. The use of this 5.1 Simulators
interface allows a VIPLE application to work seamlessly across a
variety of devices with very few to no changes in the VIPLE code. The robot units can be physical simulated. Both a desktop simulator
The third set of services includes any vendor-specific services. and Web simulators are developed. The desktop simulator is
Robots which lack support for an open communication and implemented using the Unity 3D game engine, which runs on the
programming interface, such as the Lego EV3, Lego NXT, and same computer as the VIPLE program. The Web simulators are
iRobot, must be supported on a case by case basis. To support implemented in HTML/JavaScript, which runs in a Web browser
such devices, VIPLE offers a set of built-in services that can on any computer or mobile device. One Web simulator is a 2D
communicate with the standard firmware of those devices, without version, while the other is a 3D version, depending on the user’s
requiring additional programming. Currently, the services for Lego preference. Fig. 6 shows the three simulators. The simulators
EV3 are available in VIPLE. These services allow VIPLE to consist of two parts: the robot and the environment. We can
interface with all EV3 sensors as well as EV3 drive-motors and
arm-motors. The full list is shown in the third part of Fig. 4. This
support for EV3 devices is significant, as it allows the Microsoft
VPL developers who used NXT robots to use the new EV3 robots.
Fig. 3 Basic activities in ASU VIPLE
Fig. 5 Variety of robot platforms supported by VIPLE
Fig. 4 Three types of services implemented in ASU VIPLE Fig. 6 Different simulators in VIPLE environment
CAAI Trans. Intell. Technol., 2018, Vol. 3, Iss. 2, pp. 119–130
122 This is an open access article published by the IET, Chinese Association for Artificial Intelligence and
Chongqing University of Technology under the Creative Commons Attribution License
(http://creativecommons.org/licenses/by/3.0/)
choose the robot to be a humanoid robot or a vehicle, and the We have developed a middleware for the Edison board, which can
environment is a maze that can be reconfigured dynamically while be downloaded from the ASU VIPLE site at http://neptune.fulton.ad.
the robot is moving. We can create one robot or multiple robots in asu.edu/VIPLE/.
the environment. The 3D simulators can be changed dynamically In addition to the simple robots shown in Fig. 7, VIPLE can be
while the program is running and the robot is traversing the maze. used to control complex IoT and robotics systems. Fig. 9 shows a
VIPLE programs can start with no simulator. In this case, either no more complex robot system which we are integrating into our
device is needed, or the physical devices will be used. VIPLE VIPLE environment. The humanoid and the dog robots are built
programs can also start with one of the simulators to visualise the from the same Robotis Biodloid Premium kits (http://www.robotis.
movement of the robot in the environment. us/robotis-premium/). There are up 18 motors on and different
sensors on each robot. VIPLE provides a Robot Motion service,
which allows the developer to define the functions and linking
these functions to the APIs provided by the robot. We are also
5.2 Physical robots adding more specific services into VIPLE to make programming
easier and more expressive. In addition, to control the movement
Different hardware platforms have been developed in addition to the of the robots, we are adding human-robot interaction functions,
EV3. A specific set of services are developed to work with Lego such as Amazon Alexa voice services. We are also adding the
EV3 as our open source middleware cannot be installed on EV3. robot-robot interaction so that the humanoid and the dog can
For all the other open architecture platforms, a standard interface communicate and work together among themselves.
in JSON format has been defined and a middleware has been
developed, which can be executed on all these platforms. A school
can build the robots for the course based on the open source 5.3 Communication between VIPLE and robots
middleware or purchase the prebuilt robots from a vendor that
builds such robots. For example, the pcDuino robots based on The communication between VIPLE and all the platforms are
ARM architecture and built to work with ASU VIPLE can be defined by a standard protocol shown in Fig. 10.
purchased from Link Sprite at http://store.cutedigi.com/pcduino- Since VIPLE is designed to work with a variety of IoT devices, a
asu-viple-robot/. number of challenges have been identified with the use of IoT
The boards we use for building the robot units are IoT boards, platforms. Some of these problems were easy to correct using
with both processor and Arduino connectors, which makes the VIPLE-based changes or additions, while other problems require
construction very easy. Fig. 7 shows the hardware design and user input and tuning in order to circumvent.
connection based on Intel’s Edison board. No additional hardware One of the biggest problems with IoT devices is establishing and
or logic is needed, simply connect the sensors and motors to the maintaining a reliable wireless connection. For our platforms, this is
board. We can have the Linux operating system and the driver done using either a Bluetooth connection or a Wi-Fi connection. On
library installed on the Edison board by following Intel’s Edison’s
software installation guide at https://software.intel.com/en-us/
articles/flash-tool-lite-user-manual.
It is possible to build the robot without using additional circuits or
boards, as shown in Fig. 7. However, Edison boards do not provide
ground pins and require welding multiple lines together. An
alternative is to use a breadboard to extend the ground pins, as
shown in Fig. 8.
Fig. 9 Integrating Robotis Biodloid Premium robots into VIPLE
Fig. 7 Robot design based on Intel Edison board
Fig. 8 Using breadboard to extend the grounds Fig. 10 Standard VIPLE JSON interface to devices
CAAI Trans. Intell. Technol., 2018, Vol. 3, Iss. 2, pp. 119–130
This is an open access article published by the IET, Chinese Association for Artificial Intelligence and 123
Chongqing University of Technology under the Creative Commons Attribution License
(http://creativecommons.org/licenses/by/3.0/)
most embedded devices, it is a lengthy process to find and connect to In this simple example, VIPLE automatically changes the type to
a network, especially after multiple reboots or power failures. With string after a string is entered, and the default null value step in
our work, we have created solutions to help curb these connection Microsoft VPL is eliminated. The program illustrates three types
issues. VIPLE provides support for the Bluetooth stack, making it of output methods.
easy for a user to connect to Bluetooth devices using the host As a more complex example, we show a counter using a modular
computer’s standard Bluetooth interface. With respect to Wi-Fi, design, where a module is implemented as an activity. An activity
the runtime software on IoT microcontrollers is setup to can take input parameters and generate output as the return value.
automatically connect to a known Wi-Fi network and to keep that Fig. 12 shows the VIPLE program that implements: Fig. 12a a
connection open at all times. In order to facilitate connection to main diagram and Fig. 12b a counter activity. The activity takes
the robot via the host computer, a script was also created to an input N in the main diagram. In the activity CountToN, it starts
automatically detect and display the platform’s connection from 0 and adds 1 in each iteration. It stops when the counter
information on an LCD screen. By using compressed JSON value is equal to N. The Text to Speech service is used to read out
packages to communicate between VIPLE and IoT devices, a low the numbers in the activity, and the Simple Dialog Service is used
bandwidth connection is fine for basic tasks, such as a robot to print a completion message (modification can allow the display
autonomously navigating a maze. of counted numbers instead). As can be seen in the activity
Another problem with these platforms, in general, is the large diagram, both data output and notification (event) are supported in
variance in hardware inconsistencies, both with IoT devices/ ASU VIPLE, as is the ability to define any number of named
sensors and actuators. For example, many of the cheap ultrasonic inputs to an activity. Similar to Microsoft VPL, a custom VIPLE
sensors originally used to test VIPLE’s robotics packages included activity can be converted to a VIPLE service, allowing sharing of
a large amount of noise in their data, and some even returned false modules with other programmers.
data completely (likely due to faulty components). Servo motors
purchased in large quantities can vary in terms of speed and
digital control; sometimes you will have two servos connected to 6.2 Teaching parallel computing concepts in VIPLE
the same control signal spinning at different speeds. However,
VIPLE provides an environment with which instructors can teach
using VIPLE and some small software changes, students are able
students many of the fundamentals of computing and
to overcome most of these problems. For sensors with low
programming. It can also introduce parallel computing concepts,
amounts of noise, students widen the parameters for decision
without being required to teach the specifics of synchronisation
making based on sensor input, allowing for a larger margin of
and thread-safety or how to pass data to or from threads. The
error. For servos and other actuators, students have managed to
counter example in Fig. 12 allows students to experience in part
compensate for inconsistencies by varying the power and intensity
the difference between working in a multithreaded environment
of the signals for individual outputs. Calibration modules have
and working in a sequential environment. Namely, in that
also been developed in VIPLE to allow for students to tune and
example, the ‘all done’ text may be spoken before the final
modify individual actuators in order to produce similar input/
number is spoken. Students will learn that not all threads that start
output behaviours (usually maximum speed).
first, finish first.
VIPLE was initially designed to work with Intel-based IoT
Fig. 13 shows two ways to sum all the numbers from 0 to n
devices: the Galileo, Edison, Curie, and Minnow boards. However,
(n = 1499 in this example). The diagram first initialises all
support has increased to a number of other popular boards,
variables to 0. Fig. 13a shows the first way most students learn to
including the Arduino branded boards (Uno, Mega, Duo etc.) as
write the algorithm. The program starts at 0, iterates through the
well several ATmega boards. In addition to these boards, VIPLE
sequence from 0 to 1499, and adds each value to the sum variable.
is compatible with any boards that can connect to VIPLE over one
In the end, sum will contain the final answer.
of the aforementioned interfaces (e.g. Wi-Fi) and can process the
In contrast, Fig. 13b shows a parallel implementation of the
required JSON objects.
algorithm using three threads. The programmer split the sequence
into three pieces (0–499, 500–999, and 1000–1499) and used three
sum variables to store the sum of each part of the sequence. In the
6 Educational examples implemented in VIPLE end, a join is used to wait for all three results, and the sums are
VIPLE can be used as a general-purpose programming language and
is Turing complete in its capacity. It can be used for any kind of
computational tasks. Thus, VIPLE is a perfect language for
students to learn their first programming languages.
In VIPLE, a program is represented as a diagram of workflow, and
the components are defined as activities in the diagram.
6.1 Teaching fundamental programming in VIPLE
We now start to show examples of basic programming techniques in
ASU VIPLE. Fig. 11 shows a simple ‘Hello World’ type of program.
Fig. 12 VIPLE program implementing a counter using activity model
a Main program
Fig. 11 Hello world program in VIPLE, with three output statements b Activity
CAAI Trans. Intell. Technol., 2018, Vol. 3, Iss. 2, pp. 119–130
124 This is an open access article published by the IET, Chinese Association for Artificial Intelligence and
Chongqing University of Technology under the Creative Commons Attribution License
(http://creativecommons.org/licenses/by/3.0/)
Fig. 13 VIPLE program implementing the sum of numbers
a Sequential sum
b Multithreaded sum
then added together for the final answer. This example teaches pieces: 0, 3, 6, …, 1497; 1, 4, 7, …, 1498; and 2, 5, 8, …, 1499.
students the MapReduce concept, where they learn to partition a This more evenly distributes the workload across the threads,
sequential problem into sub-problems, each of which can be another important concept in multithreading. These more advanced
independently solved on its own thread (map). Then, they use a concepts and programming issues are taught in our distributed
join to wait for all the results to arrive (spin-synchronisation). software development course and Software integration engineering
Finally, they add all the sub-sums into the total sum (reduce). course [12].
Although Fig. 13b shows an improvement over the original As an exercise, students are asked to modify the examples to add
sequential algorithm, it is not optimal. It provides students an all the numbers from 0 to 1500 (instead of 1499) and time the
opportunity to critically evaluate how a problem should be split. operation in milliseconds. As shown in the answer key in
Currently, numbers are split into adjacent groups, meaning that Figs. 14a–c, there is a significant speedup switching from a
larger numbers (which take longer to add together) are placed in sequential sum to a multithreaded sum. Furthermore, performing
the same group. An exercise for students may be to improve the optimisation technique mentioned above also provides a
the multithreaded algorithm to have better splits between speedup, albeit not as significant. Using these basic examples,
groups. For example, a more optimal split would be these three students can be asked to explore various other optimisation
CAAI Trans. Intell. Technol., 2018, Vol. 3, Iss. 2, pp. 119–130
This is an open access article published by the IET, Chinese Association for Artificial Intelligence and 125
Chongqing University of Technology under the Creative Commons Attribution License
(http://creativecommons.org/licenses/by/3.0/)
parallel programming language, VIPLE’s strength is in
event-driven programming and can respond to a sequence of
events in IoT and robotics application. The event-driven
applications are best described by finite state machines consisting
of a finite number of states and transitions between the states. The
transitions are triggered by events. As an example, Fig. 15 shows
a typical traffic light system at a four-way intersection.
Fig. 16 shows the finite state machine that models the behaviours
of the system. The control system consists of a number of timers that
regulate the length of each state and two emergency signals E Pass
and N Pass, for switching the lights to allow the traffic in
east-west (E-W) traffic and north-south (N-S) traffic to pass,
respectively. The emergency signals can be triggered by police
and ambulance vehicles. More complex traffic light system can be
implemented by adding more states and more inputs.
The finite state machine can be represented in a state transition
table as shown in Table 1.
A traffic simulator has been implemented in Unity game software
that visualises the traffic lights, with cars moving through the traffic
lights. One car is programmable in VIPLE, and other cars are random
are generated and they mode automatically in the simulator. Fig. 17
Fig. 14 Execution outputs
a Timed sequential sum
b Timed multithreaded sum
c Timed multithreaded sum with optimisations
Fig. 15 Typical traffic light system at a four-way intersection
techniques and be taught concepts such as the point at which thread
overhead exceeds the advantages offered by multithreading. To
further improve the performance, a multithreading optimiser is also
implemented, and the result is given in Fig. 14c.
VIPLE’s automatic handling of thread-safety and data passing
makes it a more valuable tool for introducing freshman students to
the concepts of parallel computing. Currently, many students have
to learn both how to change their algorithms and how to keep
variables thread-safe to start programming with multiple threads.
VIPLE reduces this burden, allowing students to more quickly
understand the basics of parallel computing. Once students
understand these basics, the idea of thread-safe variables should
cause less confusion. Fig. 16 Finite state machine for the traffic light system
VIPLE implements its own parallel computing and service
runtimes, instead of using Microsoft’s Concurrency and
Coordination Runtime/Decentralized Software Services. This Table 1 State transition table
custom implementation allows novice users to gain hands-on
experience with parallel computing and its complexities with a Current state Description Event input Next state
smaller emphasis on the exact syntactic details of multithreading.
In addition, this runtime takes full advantage of computer N-S E-W
hardware, allowing computation to be shared among any number
S1 green red timer 1 S2
of CPU cores (depending on the layout of the user’s VIPLE EW pass S2
program). This use of hardware allows new users to experience S2 yellow red timer 2 S3
first-hand the power of using parallel computing instead of NS pass S6
sequential computing. S3 red red timer 3 S4
NS pass S6
S4 red green timer 4 S5
NS pass S5
6.3 Event-driven programming in VIPLE S5 red yellow timer 5 S6
EW pass S3
S6 red red timer 6 S1
In addition to the features illustrated in the previous section that EW pass S3
VIPLE can be used as a general programming language and as a
CAAI Trans. Intell. Technol., 2018, Vol. 3, Iss. 2, pp. 119–130
126 This is an open access article published by the IET, Chinese Association for Artificial Intelligence and
Chongqing University of Technology under the Creative Commons Attribution License
(http://creativecommons.org/licenses/by/3.0/)
Fig. 17 Traffic simulator with lights and following traffic
shows a screenshot of the simulator, where the N-S direction is in
red, while the E-W direction is in green.
The VIPLE program that implements the finite state machine is
given in Fig. 18. A variable ‘light’ is used for storing the states,
which is initialised state ‘S1’. On the top-left, the six states of the
finite state machines are coded in the If-activity with six Fig. 18 VIPLE diagram implementing a traffic light system
conditions. The timers are initialised with different time lengths.
After a timer expires, the state is changed to the next state and the
state is printed on the console window using the Print Line developing the traffic light simulator that can graphically
service. The emergency signals are simulated by two keypress demonstrate the lights changing colours.
events on the bottom-right of Fig. 18. When the key ‘e’ is pressed,
the If-activity checks the current state, transitions into the next 7.2 Connecting VIPLE to devices
state based on the finite state machine to make E-W sides of the
traffic light green. Similarly, when the key ‘n’ is pressed, the Sponsored by the Intel IoT Group, a number of robots based on the
If-activity checks the current state and transitions into the next Intel architecture, including Intel’s Galileo, Bay-Trail, and Edison,
state based on the finite state machine to make N-S sides of the have been developed. ASU VIPLE can connect to these robots via
traffic light green. Wi-Fi, TCP, Bluetooth, USB, localhost, and WebSocket interfaces,
send commands to them, and control them to perform different tasks.
ASU VIPLE implemented two types of robots: generic robots and
7 Interfacing with IoT devices vendor-specific robots, such as LEGO EV3 robots. A generic robot
is a robot that can communicate with the computer running ASU
This section presents VIPLE’s standard interfaces to IoT devices and VIPLE and can process the JSON packet. As LEGO EV3 is not
an example of connecting VIPLE to the devices. an open platform, we cannot deploy code to EV3 to interpret the
JSON object. Instead, we follow the EV3 open specification and
use the specific code in VIPLE to call EV3 APIs to implement the
7.1 VIPLE’s interface definition
communication and command interpretation.
ASU VIPLE supports an open interface to other robotic platforms. In order for the main robot, the sensors, and the motors to
Any robot that follows the same interface and can interpret the communicate with ASU VIPLE properly, we need to configure the
commands from an ASU VIPLE program can work with ASU partnership between the main robot and its devices, the IP address,
VIPLE. An ASU VIPLE program communicates with the robot and ports. Fig. 19 shows the configuration of the three devices:
using the following JSON object shown in Fig. 10 in the previous main robot, drive (motors) and the distance sensor. Notice that the
section, which defines the input to the robot from the ASU VIPLE numbers may differ for different robot configuration.
program and the output from the robot to the ASU VIPLE program.
The ASU VIPLE environment encodes the control information 7.3 Maze navigation using IoT device
into this object. The robot needs to interpret the script and perform
the actions defined. On the other hand, the robot encodes the As a more complex example, we show the implementation of a robot
feedback in the same JSON format and sends the object back to navigating through a maze autonomously. Fig. 20 shows the finite
the ASU VIPLE program. Then, the ASU VIPLE program will state machine specifying a heuristic algorithm for navigating a
extract and use the information to generate the next actions. maze. Two variables are used in the finite state machine. The
The VIPLE does not include the logic to control the 12 traffic variable ‘Status’ can take six possible string-type values: Forward,
lights, which can be simulated using Print Line service. We are TurningRight, TurnedRight, TurningLeft (i.e. Spin180),
CAAI Trans. Intell. Technol., 2018, Vol. 3, Iss. 2, pp. 119–130
This is an open access article published by the IET, Chinese Association for Artificial Intelligence and 127
Chongqing University of Technology under the Creative Commons Attribution License
(http://creativecommons.org/licenses/by/3.0/)
Fig. 21 Unity simulator in VIPLE
Fig. 19 Configuration of IoT device ports
Fig. 22 First part of the main diagram implementing the two-distance maze
algorithm
The second part of the main diagram in Fig. 23 processes four
cases of the If-activity, respectively. In the main diagram, a Print
Line service is used for printing the distance sensor values for
debugging purpose. A merge activity is used share the print
service from multiple sources.
There are six activities, as can be seen in Fig. 22, which are
Fig. 20 Finite state machine for navigating a maze implemented to support the main diagram: Forward, Right90,
Stop, Left180, Right180, and Init. Note that this example uses
sequential programming after each activity (e.g. Forward) ends,
TurnedLeft, and Resume180. The int-type variable ‘RightDistance’ instead of events. If desired, a user could create an event inside
is used to store the distance to the obstacle after the robot turned
right.
The algorithm is said to be heuristic because it cannot find a
solution for all mazes. However, it has a good chance to find
a solution in most mazes, given the information collected by a
single range sensor.
For better support different needs of different classes, multiple
simulators have been developed. Among them, Unity-implemented
maze simulator allows the VIPLE program to visualise the
execution of robots in the maze. Fig. 21 shows the simulated robot
in a 3D maze.
Of course, the main reward and excitement for freshman students
taking this course are to use VIPLE to program physical IoT and
robotic devices. Fig. 5 presented all the types of physical robots
developed at ASU to support our classes. Fig. 22 (first part) and
Fig. 23 (second part) show the main diagram of the ASU VIPLE
code that uses ARM-based Raspberry Pi, robot and use generic
sensors and motors.
The algorithm starts with the robot moving forward. When it
approaches a wall in the front, it measures the distance to the right
and saves the distance into a variable. Then, the robot spins 180°
to measure the other side’s distance. It compares the two distances
and moves to the direction with more space. In this part of the
diagram, an If-activity is used to compare the current status and
the distance value from the sensor, which generates four different
cases. Fig. 23 Second part of the main diagram processing the four cases
CAAI Trans. Intell. Technol., 2018, Vol. 3, Iss. 2, pp. 119–130
128 This is an open access article published by the IET, Chinese Association for Artificial Intelligence and
Chongqing University of Technology under the Creative Commons Attribution License
(http://creativecommons.org/licenses/by/3.0/)
8.1 VIPLE in the intro to programming camps
The first use of the VIPLE program was in a selection of summer
robotics camps held at ASU, led by the authors of this paper.
Students aged 14–18 were given a basic overview and introduction
to programming using VIPLE and Lego EV3 robots. Lectures on a
variety of computer science topics were accompanied by exercises
designed to teach these students the fundamentals of
computational thinking, with a focus on devising algorithms and
translating their thoughts and English sentences into a format the
machine can understand. Later exercises proceeded to use this
knowledge to write an algorithm to guide a robot through a
random maze autonomously, as mentioned earlier in this paper.
While our previous courses that used text-based programming
languages focused a large amount of effort on syntax, VIPLE
eliminates this necessity and allows us to focus on teaching
computational thinking.
Fig. 24 Codes for Forward, Left180, and Init activities
8.2 VIPLE in the introduction to engineering courses
each of these activities and continue execution from the event thread, After VIPLE was successfully tested and used in a handful of these
instead. summer camps, it was decided to integrate the use of VIPLE in
A benefit of using the event method is that additional code can be several university level programming courses, including the
handled sequentially after an activity exits normally, while the event Introduction to Engineering course at ASU. In this course, VIPLE
code executes only when the activity creates the event (which can be was used in the same way as the summer camps, as an
at any user-defined point). This functionality is made possible by introduction to computational thinking. However, the lecture
VIPLE’s support for parallel computing. materials contained more advanced concepts, and the exercises in
Fig. 24 shows the code of three of these activities: Forward, VIPLE focused on a wider assortment of programming techniques,
Left180, and Init. The code of the Right90, stop, and Right180 are including finite state machine design and parallel programming
similar to the given activities in Fig. 24, but with different values. (especially used in interfacing with robots with multiple sensors).
A Print Line service is used in Forward to print Status for Thanks to the feedback from these courses, many significant
debugging purpose. changes were made to VIPLE, including the rewrite of the VIPLE
runtime.
7.4 Multi-robot systems with VIPLE
8.3 VIPLE in advanced software courses
One of the new improvements that separates VIPLE from its
predecessor is the ability to connect to multiple platforms at once. In addition to introductory courses, VIPLE has also been used in
This includes both IoT devices and entire robot platforms. This several upper division courses, such as the Software Integration
capability allows VIPLE to connect to a distributed network of and Engineering course at ASU. In these courses, VIPLE is used
sensors, which allows the user to simulate a distributed network of to teach a variety of higher level concepts, especially PDC topics.
systems. A prime example is using a group of robots to As discussed in the π-calculus section, VIPLE is introduced in our
autonomously transverse and map a maze. VIPLE acts as a central section on Hadoop, showing similarities and allowing students to
planner for the robot ‘swarm,’ where sensor data on the maze is gain additional experience. VIPLE is also used in the earlier
sent back and analysed from each robot. By utilising several robot sections on multithreading and workflow programming. Its main
platforms as one, just as a distributed computing system, the maze use in the course is on developing multithreaded robotics and IoT
transversal is completed in a shorter amount of time. This also applications, especially those that make use of more than one robot.
allows the central planner to use a more accurate path planning
algorithm for the maze due to the increased amount of 8.4 VIPLE abroad
information. Users can also use VIPLE to simulate a decentralised
system of computers, by merely acting as a node in the network of Due to the success of VIPLE as a programming environment for
connected robot platforms. Users can use this network to test introductory courses, the software has started to be used in other
decentralised path planning algorithms on the robots. universities, mainly in China and Vietnam. In these locations,
The use of VIPLE is ideal for distributed computing education. VIPLE is used primarily as an introductory programming
The VIPLE environment takes care of all the communication language, with a special focus on robotics and IoT devices. The
protocols and setup usually needed in a decentralised computing authors have held several workshops, both at ASU and abroad, in
environment and instead uses the environment’s runtime as the order to train new faculty on the use of VIPLE and its curriculum,
main connection hub. Students can simulate different types of the e.g. through HEEAP [25]. This widespread use of VIPLE to teach
multi-system environment by either using the built-in simulator both introductory and advanced programming topics has provided
with several robot instances or by connecting to a host of different a great deal of valuable feedback and has resulted in several
IoT devices, once again each acting as a standalone system. updates to the VIPLE software, as well as added support for new
languages.
8 VIPLE in the classroom
9 Conclusions
In order to validate the effectiveness of VIPLE as an educational
tool, several classes and camps have started to utilise VIPLE as This paper presented a visual programming language and its
the main programming environment, along with using curriculum development environment (ASU VIPLE) for programming IoT
developed by the authors specifically for VIPLE. These classroom and robotics devices. Simulation environment, as well as physical
trials have resulted in important feedback from users, which has devices, are tested and put in actual classrooms. ASU VIPLE
led to numerous improvements in the VIPLE software and updates extends the discontinued Microsoft VPL to help the community
to the accompanying curriculum. with their VPL projects. ASU VIPLE supports LEGO EV3 and all
CAAI Trans. Intell. Technol., 2018, Vol. 3, Iss. 2, pp. 119–130
This is an open access article published by the IET, Chinese Association for Artificial Intelligence and 129
Chongqing University of Technology under the Creative Commons Attribution License
(http://creativecommons.org/licenses/by/3.0/)
IoT devices based on an open architecture. It added many more [6] Wikipedia, Cyber-Physical System, Available at http://en.wikipedia.org/wiki/
functions so that the platform can be used in more advanced Cyber-physical_system
[7] Huang, J., Bastani, F., Yen, I.-L., et al.: ‘A framework for efficient service
classes, including service-oriented computing, parallel and composition in cyber-physical systems’. Proc. 5th IEEE Int. Symp. Service
distributed computing, and workflow-based software integration. Oriented System Engineering (SOSE), Nanjing, June 2010
ASU VIPLE is free and well documented at http://neptune.fulton. [8] NSF Solicitation, ‘Cyber-physical systems’, 2008. Available at www.nsf.gov/
ad.asu.edu/VIPLE/. pubs/2008/nsf08611/nsf08611.pdf
[9] Mori, K.: ‘Autonomous decentralized system and its strategic approach for
ASU VIPLE has been tested at ASU FSE100 class and several research and development’, Invited Paper, Special Issue on Autonomous
other universities since 2015. Decentralized Systems Theories and Application Deployments, IEICE Trans.
Inf. Syst., 2008, E-91-D, (9), pp. 2227–2232
[10] Autonomous Decentralized Systems (ADS) in Wikipedia. Available at https://
10 Acknowledgments en.wikipedia.org/wiki/Autonomous_decentralized_system
[11] Chen, Y., Du, Z., Garcia-Acosta, M.: ‘Robot as a service in cloud computing’.
Proc. Fifth IEEE Int. Symp. Service Oriented System Engineering (SOSE),
The authors wish to acknowledge those who contributed and helped Nanjing, 4–5 June 2010, pp. 151–158
in conceptualization and development of ASU VIPLE. Particularly, [12] Chen, Y.: ‘Service-oriented computing and system integration’ (Kendall Hunt
Dr. Yann-Hang Lee co-advised some of the student teams working Publishing, Dubuque, IA, 2018, 6th edn.)
[13] Chen, Y., Tsai, W.T.: ‘Towards dependable service-orientated computing
on the related projects. Garrett Drown developed the first version systems’, Simul. Modelling Pract. Theory, 2009, 17, (8), pp. 1361–1366
of the eRobotics visual programming tool. Garret Walliman [14] App Inventor. Available at http://ai2.appinventor.mit.edu/
implemented the second version of the visual programming [15] Alice. Available at http://www.alice.org/
language. Calvin Cheng helped in the early development of [16] Intel IoT Service Orchestration Layer. Available at https://github.com/01org/intel-
VIPLE and contributed the EV3 APIs for VIPLE. Tara De Vries iot-services-orchestration-layer
[17] Microsoft Robotics Developer Studio. Available at https://msdn.microsoft.com/
contributed to the service integration of VIPLE development. en-us/library/bb648760.aspx
Megan Plachecki, and John Robertson contributed to the JSON [18] MRDS in Wikipedia. Available at https://en.wikipedia.org/wiki/
interface design, the implementation of the middleware on the Microsoft_Robotics_Developer_Studio
Edison robot, and the robot hardware design. Matthew De Rosa [19] Chen, Y., De Luca, G.: ‘VIPLE: visual IoT/robotics programming language
developed the first version of the VIPLE Unity simulator. environment for computer science education’. 2016 IEEE Int. Parallel and
Distributed Processing Symp. Workshops (IPDPSW), Chicago, IL, 2016,
pp. 963–971
[20] De Luca, G., Mian, S.: ‘Improving mulithreaded performance algorithmically in
11 References VIPLE’. 2017 IEEE 13th Int. Symp. Autonomous Decentralized System
(ISADS), 2017, pp. 249–254
[1] IoT in Wikipedia. Available at http://en.wikipedia.org/wiki/Internet_of_Things [21] Milner, R.: ‘Communicating and mobile systems: the π-calculus’ (Cambridge UP,
[2] Haller, S. Available at http://services.future-internet.eu/images/1/16/A4_Things_ Cambridge, 1999)
Haller.pdf, May 2009 [22] Puhlmann, F., Weske, M.: ‘Using the π-calculus for formalizing workflow
[3] Chen, Y., Hu, H.: ‘Internet of intelligent things and robot as a service’, Simul. patterns’ [PDF document]. Retrieved from https://bpt.hpi.uni-potsdam.de/pub/
Modelling Pract. Theory, 2013, 34, pp. 159–171 Public/FrankPuhlmann/bpm2005-pic.pdf
[4] Steenman, T.: ‘Accelerating the transition to intelligent systems’. Intel Embedded [23] De Luca, G., Chen, Y.: ‘Visual IoT/robotics programming language in
Research and Education Summit, Chandler, AZ, February 2012. Available at pi-calculus’. The Int. Symp. Autonomous Decentralized Systems (ISADS),
http://embedded.communities.intel.com/servlet/JiveServlet/downloadBody/7148- Bangkok, Thailand, 2017, pp. 23–30
102-1-2394/Accelerating-the-Transition-to-Intelligent-Systems.pdf [24] DPWS in Wikipedia. Available at https://en.wikipedia.org/wiki/
[5] Rajkumar, R., Lee I., Sha, L., et al.: ‘Cyber physical systems: the next computing Devices_Profile_for_Web_Service
revolution’. 47th Design Automation Conf. (DAC 2010), CPS Demystified [25] HEEAP, Higher Engineering Education Alliance Program. Available at
Session, Anaheim, CA, 17 June 2010 https://heeap.org/
CAAI Trans. Intell. Technol., 2018, Vol. 3, Iss. 2, pp. 119–130
130 This is an open access article published by the IET, Chinese Association for Artificial Intelligence and
Chongqing University of Technology under the Creative Commons Attribution License
(http://creativecommons.org/licenses/by/3.0/)
Вам также может понравиться
- Cseit1831361 PDFДокумент6 страницCseit1831361 PDFPrabhu PalaniОценок пока нет
- Irjet V5i3786 PDFДокумент4 страницыIrjet V5i3786 PDFPrabhu PalaniОценок пока нет
- Adaptive Transmission Optimization in SDN-Based Industrial IoTДокумент10 страницAdaptive Transmission Optimization in SDN-Based Industrial IoTPrabhu PalaniОценок пока нет
- Quant Power Question Bank PDFДокумент565 страницQuant Power Question Bank PDFchetan shindeОценок пока нет
- PCWorld April 2018Документ111 страницPCWorld April 2018Phan BìnhОценок пока нет
- 3% Increment For Selection & Special Grade TRS Format PDFДокумент4 страницы3% Increment For Selection & Special Grade TRS Format PDFPrabhu PalaniОценок пока нет
- Biology Notes For SSC CGL PDF Thegkadda PDFДокумент385 страницBiology Notes For SSC CGL PDF Thegkadda PDFJaved Ahmed ChandioОценок пока нет
- Biology Notes For SSC CGL PDF Thegkadda PDFДокумент385 страницBiology Notes For SSC CGL PDF Thegkadda PDFJaved Ahmed ChandioОценок пока нет
- Stirling EnginesДокумент16 страницStirling EnginesPrabhu PalaniОценок пока нет
- Adobe Photoshop 7.0Документ22 страницыAdobe Photoshop 7.0paroothiОценок пока нет
- Form 16aaДокумент2 страницыForm 16aaJayОценок пока нет
- CreativityДокумент16 страницCreativityarjun845Оценок пока нет
- Circuit Theory - MAY 2011Документ5 страницCircuit Theory - MAY 2011Prabhu PalaniОценок пока нет
- The Concept of RiskДокумент32 страницыThe Concept of RiskPrabhu PalaniОценок пока нет
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5784)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (399)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (265)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (119)
- Autodesk BIM Interoperability Tools for Revit | New Features for Version 7Документ13 страницAutodesk BIM Interoperability Tools for Revit | New Features for Version 7UkashaRaufОценок пока нет
- Microprocessors Lab Manual: Muffakham Jah College of Engineering and TechnologyДокумент51 страницаMicroprocessors Lab Manual: Muffakham Jah College of Engineering and TechnologyPallavi Pradip NageОценок пока нет
- Programming On AutoCadДокумент25 страницProgramming On AutoCadRaul AndresОценок пока нет
- Effective Google Search TechniquesДокумент6 страницEffective Google Search Techniquesluiz.teixeiraОценок пока нет
- Memory Module - WikipediaДокумент6 страницMemory Module - WikipediaJosh VОценок пока нет
- SCOM - The Cumulative Update 5Документ19 страницSCOM - The Cumulative Update 5Samee ChouguleОценок пока нет
- Eforensics Open 01 2013 PDFДокумент57 страницEforensics Open 01 2013 PDFConstantin Alexandru FloreaОценок пока нет
- Automated Planning and ActingДокумент472 страницыAutomated Planning and ActingVehid TavakolОценок пока нет
- Field Power: Work Force Management System For STC Network OperationsДокумент17 страницField Power: Work Force Management System For STC Network Operationsnadeemgza100% (3)
- SQL Interview Questions and Answers PDF DownloadДокумент7 страницSQL Interview Questions and Answers PDF Downloadsubash_dot0% (2)
- NADRA Bio-VeriSys SpecificationДокумент35 страницNADRA Bio-VeriSys Specificationinfiniti786Оценок пока нет
- Final2 Sem1Документ21 страницаFinal2 Sem1Beckhs BksОценок пока нет
- MY BOOK CART Project ReportДокумент125 страницMY BOOK CART Project ReportSuraj SinghОценок пока нет
- MQ Detailed Exam ObjectivesДокумент45 страницMQ Detailed Exam ObjectivesHazi NayabОценок пока нет
- Oracle Apps Forms Personalization - (Demonstrated Example - (Shipping and Transaction Form) - Using Zooming, Global Variables, Local Variables, Passing Parameters Etc.,)Документ23 страницыOracle Apps Forms Personalization - (Demonstrated Example - (Shipping and Transaction Form) - Using Zooming, Global Variables, Local Variables, Passing Parameters Etc.,)Balamurugan Packirisamy100% (75)
- Leave Management SystemДокумент13 страницLeave Management SystemShivani Aggarwal50% (2)
- Using Dataflow Diagrams: Systems Analysis and Design, 8e Kendall & KendallДокумент46 страницUsing Dataflow Diagrams: Systems Analysis and Design, 8e Kendall & KendallEbtehal MahdyОценок пока нет
- BPC TechDesignDefinition T PDFДокумент27 страницBPC TechDesignDefinition T PDFAmir BaigОценок пока нет
- Vxworks BSP Developers Guide 6.7Документ210 страницVxworks BSP Developers Guide 6.7Jack TauОценок пока нет
- Install KUKA - Sim 2.1 enДокумент11 страницInstall KUKA - Sim 2.1 enpepeОценок пока нет
- Dept. CS (SF) BHC Question Bank (UG) Web App. DevДокумент25 страницDept. CS (SF) BHC Question Bank (UG) Web App. DevhairboiОценок пока нет
- AP05-AA6-EV06. Inglés. Construcción de Un Glosario Técnico en Inglés para El Área OcupacionalДокумент4 страницыAP05-AA6-EV06. Inglés. Construcción de Un Glosario Técnico en Inglés para El Área OcupacionalEDINSO AVIER ACOSTAОценок пока нет
- SAP System Directory Structure OverviewДокумент3 страницыSAP System Directory Structure OverviewmunnazОценок пока нет
- Configure K10STAT: 0 Performance Handicap With Less Heat Issues and Longer Battery Life!!Документ8 страницConfigure K10STAT: 0 Performance Handicap With Less Heat Issues and Longer Battery Life!!kutulucuОценок пока нет
- 2-BCA 10 Lecture 2 - Computer ConceptsДокумент36 страниц2-BCA 10 Lecture 2 - Computer ConceptsHannah VillanuevaОценок пока нет
- Eric Roberts Art Science Java PDFДокумент2 страницыEric Roberts Art Science Java PDFEvanОценок пока нет
- Revision BIOS Tweaking GuideДокумент6 страницRevision BIOS Tweaking GuideHeroLanderОценок пока нет
- Bergstra 89 ACP UniversalДокумент17 страницBergstra 89 ACP UniversalGaurav SharmaОценок пока нет
- 6.3.1.1 Lab - Securing Layer 2 Switches PDFДокумент23 страницы6.3.1.1 Lab - Securing Layer 2 Switches PDFnganga0% (2)
- Data Structures and AlgorithmsДокумент18 страницData Structures and AlgorithmsabhiОценок пока нет