Вам также может понравиться
- I-Monitor Motor Controller Manual Rev 7 6Документ72 страницыI-Monitor Motor Controller Manual Rev 7 6elch310scridbОценок пока нет
- TD - Datasheet TK400 NDДокумент4 страницыTD - Datasheet TK400 NDSocaciu VioricaОценок пока нет
- Tech. Specn. Annexure 2 PLCДокумент17 страницTech. Specn. Annexure 2 PLCom007fireОценок пока нет
- Low Power UART Design For Serial Data CommunicationДокумент21 страницаLow Power UART Design For Serial Data CommunicationSuman Gm100% (1)
- An Efficient Monitering of Substation Using RF: Voltage Current TemperatureДокумент38 страницAn Efficient Monitering of Substation Using RF: Voltage Current TemperatureVamshi Kumar Reddy MОценок пока нет
- Em 100Документ8 страницEm 100Carlos WillamsОценок пока нет
- Es Notes Unit 5Документ33 страницыEs Notes Unit 51balamanianОценок пока нет
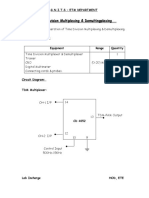
- Time Division Multiplexing & DemultingplexingДокумент5 страницTime Division Multiplexing & Demultingplexingneha yarrapothuОценок пока нет
- Bidirectional Visitor CounterДокумент17 страницBidirectional Visitor CounterPankaj KumarОценок пока нет
- DCS PresentationДокумент77 страницDCS Presentationislamooov100% (4)
- UART Interfacing With 8051 PrimerДокумент10 страницUART Interfacing With 8051 PrimerNitesh JadhavОценок пока нет
- Microcontroller 8051Документ42 страницыMicrocontroller 8051om18sahuОценок пока нет
- TRICON Fault Tolerant SystemsДокумент49 страницTRICON Fault Tolerant Systemsjgeo82Оценок пока нет
- Manual: GdańskДокумент14 страницManual: GdańskGeorge GeorgeОценок пока нет
- IRI-Pro-V2: C&S Electric LimitedДокумент8 страницIRI-Pro-V2: C&S Electric LimitedRAPRATSINОценок пока нет
- Micom p12xДокумент8 страницMicom p12xAnonymous G1Hm2qpMVkОценок пока нет
- Pae Receiver Type t6r Maintenance HandbookДокумент80 страницPae Receiver Type t6r Maintenance Handbookcmge_200580% (5)
- Embedded MicrocontrollerДокумент30 страницEmbedded MicrocontrollervinoliabenitaОценок пока нет
- NM-281A NMEA-0183 Multiplier User GuideДокумент4 страницыNM-281A NMEA-0183 Multiplier User GuideNguyen Phuoc HoОценок пока нет
- PXC Compact Series Unitary Equipment Controller PDFДокумент6 страницPXC Compact Series Unitary Equipment Controller PDFKeo RithyОценок пока нет
- S7-300 PLC in RTG NEW V1.0Документ42 страницыS7-300 PLC in RTG NEW V1.0Dinh SangОценок пока нет
- Time Operated Electrical Appliance Control SystemДокумент82 страницыTime Operated Electrical Appliance Control Systempoozu100% (1)
- DCS Presentation - Based Centum VPДокумент77 страницDCS Presentation - Based Centum VPrvicentclases100% (4)
- MPR2000Документ40 страницMPR2000JoselopezperezОценок пока нет
- Open Ended CS SolvedДокумент17 страницOpen Ended CS SolvedMalik Ali BiadОценок пока нет
- CPM2A Micro Controller CPU and Expansion Modules: Roduct VerviewДокумент5 страницCPM2A Micro Controller CPU and Expansion Modules: Roduct VerviewDuy PhươngОценок пока нет
- 2CSG445001D0202 - Dmtme96 enДокумент14 страниц2CSG445001D0202 - Dmtme96 enKOUADIO PATRICEОценок пока нет
- Abb Dmtme-96Документ14 страницAbb Dmtme-96csystemsОценок пока нет
- Mce BLK Dia - Signal Flow - 1Документ1 страницаMce BLK Dia - Signal Flow - 1Cardell93Оценок пока нет
- Guide 1Документ2 страницыGuide 1sgdgtfОценок пока нет
- On Usb, For Bipolar Trannies and Fets: Transistor Curve TraДокумент8 страницOn Usb, For Bipolar Trannies and Fets: Transistor Curve TraHecOsОценок пока нет
- Creation of PRA - Procedure For OCB283Документ9 страницCreation of PRA - Procedure For OCB283srikanth.2335528Оценок пока нет
- Submitted To: Submitted By: Mr. Abishek Sharma Arish Kumar Sharma 100640418019 Ece-AДокумент25 страницSubmitted To: Submitted By: Mr. Abishek Sharma Arish Kumar Sharma 100640418019 Ece-ASharan ThapaОценок пока нет
- RTP 3000 DCSДокумент15 страницRTP 3000 DCSBhaskaran RamaniОценок пока нет
- Micom P115: Numerical CT and Auxiliary Voltage Powered Overcurrent RelaysДокумент4 страницыMicom P115: Numerical CT and Auxiliary Voltage Powered Overcurrent RelaysLa Picarona del PeruОценок пока нет
- Introduction To: Basic Programmable Logic Controller TrainingДокумент94 страницыIntroduction To: Basic Programmable Logic Controller TrainingnuafzanОценок пока нет
- DST Tmpm370fydfg-Tde en 21751Документ498 страницDST Tmpm370fydfg-Tde en 21751trân văn tuấnОценок пока нет
- Tower Top Amplifier and Receiver Multicoupler / Tta ControllerДокумент8 страницTower Top Amplifier and Receiver Multicoupler / Tta ControllerThắng TrầnОценок пока нет
- 00718a - Brush-DC Servomotor Implementation Using PIC17C756AДокумент33 страницы00718a - Brush-DC Servomotor Implementation Using PIC17C756AadisaksОценок пока нет
- NV 2002-07 Understanding and Using Norton Op-Amp ICs Parts 1-2Документ9 страницNV 2002-07 Understanding and Using Norton Op-Amp ICs Parts 1-2Dylan KomichekОценок пока нет
- Iri-Pro V2Документ8 страницIri-Pro V2Arun KumarОценок пока нет
- PLC Quick Working ExplainДокумент8 страницPLC Quick Working ExplainMalik SameeullahОценок пока нет
- Epabx TrainerДокумент19 страницEpabx TrainerMadhusudanan78Оценок пока нет
- Fir ST Draf T: Ioc 4T Input / Output Card Type IOC 4TДокумент4 страницыFir ST Draf T: Ioc 4T Input / Output Card Type IOC 4TMajid ManouchehriОценок пока нет
- Experiment No. 1 (B) : Interfacing UART of LPC2148 To Transmit and Receive MessageДокумент4 страницыExperiment No. 1 (B) : Interfacing UART of LPC2148 To Transmit and Receive MessageJohn FarandisОценок пока нет
- QSKV50 ElectronicДокумент38 страницQSKV50 ElectronicDarlan neguinhoОценок пока нет
- Búsqueda Del Medio - SEBU7898 - C18 Generator Set Cat Digital Voltage Regulator (Cat DVR)Документ4 страницыBúsqueda Del Medio - SEBU7898 - C18 Generator Set Cat Digital Voltage Regulator (Cat DVR)CEVegaOОценок пока нет
- Gravimetric FeederДокумент47 страницGravimetric FeederYousuf Ali67% (3)
- Helmet MiniДокумент56 страницHelmet MiniSumanth VarmaОценок пока нет
- GSM Based Home Security SystemДокумент52 страницыGSM Based Home Security SystemCheedella Subbarao100% (1)
- On PLCC Carier CommunicationДокумент4 страницыOn PLCC Carier CommunicationDipak Kumar PatelОценок пока нет
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2От EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Оценок пока нет
- Radio Shack TRS-80 Expansion Interface: Operator's Manual: Catalog Numbers: 26-1140, 26-1141, 26-1142От EverandRadio Shack TRS-80 Expansion Interface: Operator's Manual: Catalog Numbers: 26-1140, 26-1141, 26-1142Оценок пока нет
- Antena DatasheetДокумент2 страницыAntena DatasheetDeyaniraOjedaОценок пока нет
- Color Sensor Module User GuideДокумент6 страницColor Sensor Module User GuideSyrilleОценок пока нет
- (Elec) Generator Excitation SystemДокумент51 страница(Elec) Generator Excitation SystemThanh Son100% (1)
- Ups Part 2Документ5 страницUps Part 2NeztopОценок пока нет
- Axial Ae 1 Esc ManualДокумент1 страницаAxial Ae 1 Esc ManualEnache DanielОценок пока нет
- 1.5 Electric MotorsДокумент64 страницы1.5 Electric MotorsLeojhun PalisocОценок пока нет
- rr220402 Electrical TechnologyДокумент8 страницrr220402 Electrical TechnologySRINIVASA RAO GANTAОценок пока нет
- MaestroДокумент32 страницыMaestrodanielhoseaОценок пока нет
- Partial DischargeДокумент6 страницPartial Dischargebrockwell4960% (1)
- PROANNOUNCE Software ManualДокумент218 страницPROANNOUNCE Software ManualViktor GrgurićОценок пока нет
- Advanced SensorsДокумент23 страницыAdvanced SensorsAzharuddin MansooriОценок пока нет
- 2019 Summer Model Answer Paper (Msbte Study Resources)Документ14 страниц2019 Summer Model Answer Paper (Msbte Study Resources)2251 EE MANMAT BIRADARОценок пока нет
- E 0 A 6Документ4 страницыE 0 A 6EdОценок пока нет
- 74HC4002 74HCT4002: 1. General DescriptionДокумент17 страниц74HC4002 74HCT4002: 1. General DescriptionJim LiebОценок пока нет
- Test Schedule Summary.1709Документ116 страницTest Schedule Summary.1709Sharath ChandraОценок пока нет
- Test Specification Number 5Документ9 страницTest Specification Number 5tugba.yilmazОценок пока нет
- Reverse Engineering x86 Processor Microcode - P Koppe Et Al - Sec17 - 2017 PDFДокумент19 страницReverse Engineering x86 Processor Microcode - P Koppe Et Al - Sec17 - 2017 PDFsher khanОценок пока нет
- Notes7 Applying Synthesis ConstraintsДокумент18 страницNotes7 Applying Synthesis ConstraintsravishopingОценок пока нет
- P-9966A CAN Class A Network Card Issue1.03Документ2 страницыP-9966A CAN Class A Network Card Issue1.03RaviОценок пока нет
- Aviat E-Band Wireless Technology V1.0 PDFДокумент11 страницAviat E-Band Wireless Technology V1.0 PDFtarreroОценок пока нет
- 4415 3000 Solved Problems in Electric Circuits SchaumsДокумент14 страниц4415 3000 Solved Problems in Electric Circuits Schaumsalfred calaunanОценок пока нет
- 300B0000 IQT Basic StandardДокумент2 страницы300B0000 IQT Basic StandardSri67% (3)
- Fuse Wire RatingsДокумент1 страницаFuse Wire RatingsNitin PatelОценок пока нет
- 5V 1A Mini/Micro USB 18650 Lithium Battery Charger Board Module TP4056Документ5 страниц5V 1A Mini/Micro USB 18650 Lithium Battery Charger Board Module TP4056francesco marincolaОценок пока нет
- WM-E1S Family Quick Reference Guide ENG v2 00-1Документ1 страницаWM-E1S Family Quick Reference Guide ENG v2 00-1Santiago MuñozОценок пока нет
- Generator BasicsДокумент10 страницGenerator BasicsSudipta ChatterjeeОценок пока нет
- M08 Domestic ApplianceДокумент94 страницыM08 Domestic AppliancebilisummaaОценок пока нет
- ABB - ACS880-37 - Hardware Manual 160-3200kWДокумент278 страницABB - ACS880-37 - Hardware Manual 160-3200kWLuisОценок пока нет
- Tan Delta Test - Loss Angle Test - Dissipation Factor TestДокумент2 страницыTan Delta Test - Loss Angle Test - Dissipation Factor TesthusnainyasirОценок пока нет
- Capacitor Placement in Radial Distribution Systems For Loss ReductionДокумент5 страницCapacitor Placement in Radial Distribution Systems For Loss ReductionhmortОценок пока нет