Вам также может понравиться
- Matconvnet: Convolutional Neural Networks For MatlabДокумент55 страницMatconvnet: Convolutional Neural Networks For MatlabAhmed AleesaОценок пока нет
- Pub. KEДокумент56 страницPub. KEKees EveraarsОценок пока нет
- Reconfigurable Computing: The Theory and Practice of FPGA-Based ComputationОт EverandReconfigurable Computing: The Theory and Practice of FPGA-Based ComputationОценок пока нет
- Implementation of A Fast Artificial Neural Network Library (Fann)Документ92 страницыImplementation of A Fast Artificial Neural Network Library (Fann)Steffen NissenОценок пока нет
- Matconvnet ManualДокумент59 страницMatconvnet ManualUsama JavedОценок пока нет
- Nscript U ' M: SER S AnualДокумент38 страницNscript U ' M: SER S AnualphamxuanhaiОценок пока нет
- Summer of Science Report On - Intro To Machine LearningДокумент36 страницSummer of Science Report On - Intro To Machine LearningAvishek KumarОценок пока нет
- OpenACC Programming Guide 0 0Документ73 страницыOpenACC Programming Guide 0 0Necmettin yıldızОценок пока нет
- Tcconfig DocumentationДокумент27 страницTcconfig DocumentationВиктор БарышевОценок пока нет
- Full Text 01Документ40 страницFull Text 01TÂM VŨ MINHОценок пока нет
- Deep Learning Notes Andrew NGДокумент54 страницыDeep Learning Notes Andrew NGDSОценок пока нет
- Digital Signal Procesing Lab Complex Engineering Design Submitted TO Mam Rida Maamoor BYДокумент19 страницDigital Signal Procesing Lab Complex Engineering Design Submitted TO Mam Rida Maamoor BYRana DastgirОценок пока нет
- Report System Identification and ModellingДокумент34 страницыReport System Identification and ModellingAlexandre HaverbekeОценок пока нет
- DESIGN OF PHYSICAL RANDOM ACCESSThesisReportNMДокумент55 страницDESIGN OF PHYSICAL RANDOM ACCESSThesisReportNMKadir KöylüОценок пока нет
- Morgan ManualДокумент34 страницыMorgan ManualLakshmi PrasadОценок пока нет
- BTP ReportДокумент27 страницBTP Reportshubham agrawalОценок пока нет
- Zero Knowledge Proof MethodДокумент37 страницZero Knowledge Proof MethodHasan Al-AbadiОценок пока нет
- Anycast-Based DNS in Mobile Networks: Master's ThesisДокумент51 страницаAnycast-Based DNS in Mobile Networks: Master's ThesisCheikh Ahmet Tidiane DiengОценок пока нет
- Work Book 463Документ113 страницWork Book 463Nithin Varma RudrarajuОценок пока нет
- Fourier Analysis MachineДокумент81 страницаFourier Analysis MachineaminaОценок пока нет
- Two Stage Opamp DesignДокумент18 страницTwo Stage Opamp DesignHajime100% (1)
- Protocol Design and Implementation For Wireless Sensor NetworkДокумент87 страницProtocol Design and Implementation For Wireless Sensor NetworkGull KhanОценок пока нет
- Cytoscape3 7 0manual PDFДокумент249 страницCytoscape3 7 0manual PDFHalil İbrahim ÖzdemirОценок пока нет
- Aff-Wild Database and Aff-Wild NetДокумент69 страницAff-Wild Database and Aff-Wild NetSheldon SchifferОценок пока нет
- Haozhang Ms ThesisДокумент56 страницHaozhang Ms Thesisgheorghe garduОценок пока нет
- Determining Room Occupancy With Machine Learning Techniques: Daniel MyhrmanДокумент54 страницыDetermining Room Occupancy With Machine Learning Techniques: Daniel MyhrmankryptodropppОценок пока нет
- The Vienna 5G Link Level Simulator v1.1: User ManualДокумент52 страницыThe Vienna 5G Link Level Simulator v1.1: User ManualGraça Sousa MendesОценок пока нет
- Ofdm ThesisДокумент128 страницOfdm ThesisRohini SeetharamОценок пока нет
- Users Guide Net2planДокумент56 страницUsers Guide Net2planMourad SatouriОценок пока нет
- MDP TutorialДокумент104 страницыMDP TutorialcasesilvaОценок пока нет
- Image Compression For Wireless Sensor Networks.: Johannes KarlssonДокумент56 страницImage Compression For Wireless Sensor Networks.: Johannes KarlssondanakibreОценок пока нет
- Development of A Low-Cost Underwater Acoustic Communication SystemДокумент20 страницDevelopment of A Low-Cost Underwater Acoustic Communication SystemImad ud dinОценок пока нет
- Matlab BookДокумент110 страницMatlab BookNgema ZamaОценок пока нет
- Driverless A I BookletДокумент120 страницDriverless A I BookletkrominesОценок пока нет
- Three Step Cooperative MIMO RelayingДокумент74 страницыThree Step Cooperative MIMO RelayingTracy LawsonОценок пока нет
- Abstractive Text Summarization With Attention-Based MechanismДокумент50 страницAbstractive Text Summarization With Attention-Based MechanismsoumyaОценок пока нет
- DeepEEG IanWalker2015Документ75 страницDeepEEG IanWalker2015Akash GoelОценок пока нет
- Harsha ThesisДокумент62 страницыHarsha ThesisAnuraag SharmaОценок пока нет
- z3 Master Thesis Roelofs v1Документ64 страницыz3 Master Thesis Roelofs v1ohood alzaidiОценок пока нет
- Anti Collision Mechanism in VehiclesДокумент39 страницAnti Collision Mechanism in VehiclesMuhammad QasimОценок пока нет
- HSPICE Tutorial: EE105 Lab ExperimentsДокумент16 страницHSPICE Tutorial: EE105 Lab ExperimentsSuyash MishraОценок пока нет
- Simulation of A TCU Node On A Virtual CAN Bus: Master ThesisДокумент23 страницыSimulation of A TCU Node On A Virtual CAN Bus: Master ThesisSilviu ScarlatОценок пока нет
- Intro SupercomputingДокумент292 страницыIntro Supercomputingrd8Оценок пока нет
- Implementing A Virtual Network Interface For Linux 2.6: Semester Thesis August 3, 2006Документ39 страницImplementing A Virtual Network Interface For Linux 2.6: Semester Thesis August 3, 2006vpacketbits999Оценок пока нет
- Grid HowtoДокумент75 страницGrid HowtoWoong KimОценок пока нет
- QuTiP-2 0 0Документ207 страницQuTiP-2 0 0stellasllОценок пока нет
- Manual ARM Microcontroller Course E.T.S.V. Scintilla: Cursuscommissie May 27, 2015Документ36 страницManual ARM Microcontroller Course E.T.S.V. Scintilla: Cursuscommissie May 27, 2015Jonathan JaegerОценок пока нет
- DeepLearning CompletedДокумент136 страницDeepLearning CompletedAram ShojaeiОценок пока нет
- Xmlschema PDFДокумент42 страницыXmlschema PDFdaemondevОценок пока нет
- Vehicle Perception With Lidar and Deep LearningДокумент72 страницыVehicle Perception With Lidar and Deep LearningŽygimantas MikulisОценок пока нет
- A Portable Vision System For Detecting and Counting Maggots: Lazar LazarovДокумент59 страницA Portable Vision System For Detecting and Counting Maggots: Lazar LazarovAnonymous jQ6kN4Оценок пока нет
- Microprocessor Project: Fabrice Ben Hamouda, Yoann Bourse, Hang ZhouДокумент27 страницMicroprocessor Project: Fabrice Ben Hamouda, Yoann Bourse, Hang Zhoumarye bayeОценок пока нет
- Power System Protection Modelling With IEC 61850 and IEC 61499Документ81 страницаPower System Protection Modelling With IEC 61850 and IEC 61499teja61850Оценок пока нет
- User Manual of Emergy SimulatorДокумент36 страницUser Manual of Emergy SimulatoryirleyОценок пока нет
- PDF Engineering ComputingДокумент215 страницPDF Engineering ComputingSiti Aida SallehОценок пока нет
- KNX Design Project Preparation enДокумент32 страницыKNX Design Project Preparation enjfranbripi793335Оценок пока нет
- KNX Solutions enДокумент62 страницыKNX Solutions enjfranbripi793335Оценок пока нет
- HRPUB Manu Template V1Документ5 страницHRPUB Manu Template V1jfranbripi793335Оценок пока нет
- JAISCR Sample PaperДокумент2 страницыJAISCR Sample Paperjfranbripi793335Оценок пока нет
- Case Studies in Construction MaterialsДокумент15 страницCase Studies in Construction Materialsjfranbripi793335Оценок пока нет
- Silabo Metodos NúmericosДокумент3 страницыSilabo Metodos Númericosjfranbripi793335Оценок пока нет
- MultisimДокумент4 страницыMultisimjfranbripi793335Оценок пока нет
- Ebook Official EXADEP Test Study GuideДокумент139 страницEbook Official EXADEP Test Study Guidejfranbripi793335Оценок пока нет
- Ebook Official EXADEP Test Study GuideДокумент139 страницEbook Official EXADEP Test Study Guidejfranbripi793335Оценок пока нет
- Creating Neural Networks in Python: Information TechnologyДокумент3 страницыCreating Neural Networks in Python: Information Technologyjfranbripi793335Оценок пока нет
- Data Modeling and Database Design 2nd Edition by Umanath Scamell ISBN Solution ManualДокумент22 страницыData Modeling and Database Design 2nd Edition by Umanath Scamell ISBN Solution Manualgerri100% (27)
- Module2 Part1Документ26 страницModule2 Part1ReshmaОценок пока нет
- Using LSTM and GRU Neural Network Methods For Traffic Ow PredictionДокумент6 страницUsing LSTM and GRU Neural Network Methods For Traffic Ow PredictionClara RontoméОценок пока нет
- Choose The Letter of The Correct Answer Then Write It Before The NumberДокумент3 страницыChoose The Letter of The Correct Answer Then Write It Before The NumbersheilaОценок пока нет
- Artificial Neural Networks - Architectures and Applications PDFДокумент264 страницыArtificial Neural Networks - Architectures and Applications PDFRayendraОценок пока нет
- Surrogate Key Vs Natural Key Differences and When To Use in SQL ServerДокумент7 страницSurrogate Key Vs Natural Key Differences and When To Use in SQL Serverelliottjs1091Оценок пока нет
- Cyberbullying Detection Through Sentiment AnalysisДокумент6 страницCyberbullying Detection Through Sentiment AnalysisZobayer AhmedОценок пока нет
- Identifikasi Kematangan Buah Tropika Berbasis Sistem Penciuman Elektronik Menggunakan Deret Sensor GAs Semikonduktor Dengan Metode Jaringan Syaraf TiruanДокумент9 страницIdentifikasi Kematangan Buah Tropika Berbasis Sistem Penciuman Elektronik Menggunakan Deret Sensor GAs Semikonduktor Dengan Metode Jaringan Syaraf TiruanPutri Wahyulian AОценок пока нет
- Topical Authority Mind MappingДокумент1 страницаTopical Authority Mind Mappingnimrali2021Оценок пока нет
- Image Sentiment Analysis Using Deep LearningДокумент4 страницыImage Sentiment Analysis Using Deep LearningCHOUDHARY SHAILENDRA VIJAYCHANDRAОценок пока нет
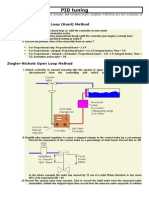
- PID TuningДокумент4 страницыPID TuningJitendra Kumar100% (1)
- Transcultural Communication ModesДокумент4 страницыTranscultural Communication ModesRoland DotorОценок пока нет
- Machine Learning Andrew NG Week 6Документ11 страницMachine Learning Andrew NG Week 6Hương ĐặngОценок пока нет
- Machine Learning - Lec1Документ56 страницMachine Learning - Lec1Deepali KoiralaОценок пока нет
- New Microsoft PowerPoint PresentationДокумент14 страницNew Microsoft PowerPoint PresentationFaarax MaaxОценок пока нет
- Automatic Controllers & Control ModesДокумент74 страницыAutomatic Controllers & Control ModesVishal IyerОценок пока нет
- Project Report On Artificial IntelligenceДокумент23 страницыProject Report On Artificial IntelligenceManpreet Singh85% (39)
- The Differences of Discourse Analysis and PragmaticsДокумент8 страницThe Differences of Discourse Analysis and PragmaticsRio IrwansyahОценок пока нет
- Answer Summary PowerbiДокумент65 страницAnswer Summary Powerbimadhankumar.mc18Оценок пока нет
- Jenil Desai ResumeДокумент1 страницаJenil Desai ResumeSujay TorviОценок пока нет
- Time Series Forecasting Using LSTM Networks: A Symbolic ApproachДокумент12 страницTime Series Forecasting Using LSTM Networks: A Symbolic Approach8c354be21dОценок пока нет
- Applied Electronics and InstrumentationДокумент192 страницыApplied Electronics and InstrumentationSHINUMMОценок пока нет
- Sentiment Analysis From Movie Reviews UsДокумент5 страницSentiment Analysis From Movie Reviews UsOffice WorkОценок пока нет
- Project InnerEye RSNA 2017 11 28Документ46 страницProject InnerEye RSNA 2017 11 28NicolásIgnacioFigueroaRamírezОценок пока нет
- Fuzzy Logic Hybrid SystemДокумент42 страницыFuzzy Logic Hybrid SystemumairahmadnasirОценок пока нет
- MSC Lecture07Документ22 страницыMSC Lecture07Abhishek AlderОценок пока нет
- Signals and Systems EEE223 Analysis of Continuous Time LTI Systems Using Convolution IntegralДокумент9 страницSignals and Systems EEE223 Analysis of Continuous Time LTI Systems Using Convolution IntegralTayyab AhmedОценок пока нет
- Dynamic Mixtures of Contextual Experts For Language ModelingДокумент11 страницDynamic Mixtures of Contextual Experts For Language ModelingAnonymous IK307WzОценок пока нет
- Non-Classical Models of IR (Uploaded by Snaptricks - In)Документ8 страницNon-Classical Models of IR (Uploaded by Snaptricks - In)sharan rajОценок пока нет
- Use of Swarm Intelligence Algorithms For Pattern Formation PDFДокумент10 страницUse of Swarm Intelligence Algorithms For Pattern Formation PDFVinit UnniОценок пока нет