Академический Документы
Профессиональный Документы
Культура Документы
SISTEMAS EQUIVALENTES (v2) PDF
Загружено:
Fidel AndresОригинальное название
Авторское право
Доступные форматы
Поделиться этим документом
Поделиться или встроить документ
Этот документ был вам полезен?
Это неприемлемый материал?
Пожаловаться на этот документАвторское право:
Доступные форматы
SISTEMAS EQUIVALENTES (v2) PDF
Загружено:
Fidel AndresАвторское право:
Доступные форматы
1
CAPÍTULO 3 SISTEMAS EQUIVALENTES DE FUERZAS
3.2 PRODUCTO VECTORIAL DE DOS VECTORES
El producto vectorial de dos vectores ⃗𝑨 y ⃗𝑩 ⃗ está definido por el vector ⃗𝑪 cuya
línea de acción es perpendicular al plano formado por ⃗𝑨 y ⃗𝑩 ⃗ , su sentido está
determinado por la regla de la mano derecha y su magnitud C es igual al
producto de las magnitudes de 𝑨 ⃗ y𝑩⃗⃗ por el seno del ángulo ϴ entre ellos, como
se indica en la Figura 3.1(a), o sea:
𝐶 = 𝐴𝐵𝑠𝑒𝑛𝜃 (3.1)
Figura 3.1
El producto vectorial, denominado también producto cruz, se designa por una
cruz en medio de los dos vectores ⃗𝑨 y ⃗𝑩
⃗ , así:
⃗ =𝑨
𝑪 ⃗⃗ 𝒙𝑩
⃗⃗ (3.2)
Al aplicar la regla de la mano derecha para efectuar el producto vectorial ⃗𝑨𝒙𝑩,⃗⃗⃗
es necesario inicialmente abrirla con el dedo pulgar en dirección perpendicular
al plano donde se encuentran 𝑨 ⃗ y 𝑩⃗⃗ y al cerrarla, describir con los dedos
⃗ sobre 𝑩
restantes, el movimiento que se obtiene al plegar 𝑨 ⃗⃗ , entonces el sentido
⃗ estará indicando por el mencionado dedo pulgar, como lo muestra la Figura
de 𝑪
3.1(a).
José Manuel Arroyo Andrade UNISUCRE
2
Nótese que al efectuar el producto vectorial de ⃗𝑩
⃗ 𝒙𝑨
⃗ como se indica en la Figura
3.1(b), se obtiene un vector de la misma dirección perpendicular al plano donde
se encuentran 𝑨 ⃗⃗ y 𝑩
⃗⃗ con la diferencia de que, al aplicar la regla de la mano
derecha es necesario al abrirla, colocar el pulgar hacia abajo, para que al
cerrarla, poder obtener con los otros cuatro dedos, el movimiento de doblar ⃗𝑩 ⃗
sobre ⃗𝑨, dando como resultado un vector − ⃗𝑪, de la misma magnitud y la misma
dirección de ⃗𝑪, aunque de sentido contrario, expresado así:
⃗ =𝑩
−𝑪 ⃗⃗ 𝒙𝑨
⃗ (3.3)
3.3 PROPIEDADES DEL PRODUCTO VECTORIAL
Al comparar las relaciones (3.2) y (3.3) se observa que el producto vectorial no
es conmutativo, puesto que ⃗𝑨
⃗ 𝒙𝑩
⃗⃗ es diferente de ⃗𝑩
⃗ 𝒙𝑨
⃗ , siendo:
⃗ 𝒙𝑩
𝑨 ⃗⃗ = − 𝑩
⃗⃗ 𝒙𝑨
⃗ (3.4)
En lo referente a la propiedad distributiva de la suma, se puede afirmar que se
cumple, teniendo en cuenta que la siguiente ecuación es demostrable:
⃗ 𝒙(𝑩
𝑨 ⃗⃗ 1 + 𝑩
⃗⃗ 2 ) = 𝑨
⃗ 𝒙𝑩
⃗⃗ 1 + 𝑨
⃗ 𝒙𝑩
⃗⃗ 2 (3.5)
3.4 PRODUCTO VECTORIAL DE LOS VECTORES UNITARIOS
Al asignar los vectores unitarios i, j y k a los ejes X, Y y Z respectivamente, el
producto vectorial para cada par de ellos, mostrados en la Figura 3.2, están
dados por:
𝒊𝒙𝒊 = 𝟎 𝒋𝒙𝒊 = −𝒌 𝒌𝒙𝒊 = 𝒋
𝒊𝒙𝒋 = 𝒌 𝒋𝒙𝒋 = 𝟎 𝒌𝒙𝒋 = −𝒊 (3.6)
𝒊𝒙𝒌 = −𝒋 𝒋𝒙𝒌 = 𝒊 𝒌𝒙𝒌 = 𝟎
Es de notar que el producto vectorial de los vectores iguales: i x i, j x j y k x k es
igual a cero, puesto que la magnitud está dada por 1x1sen0° = 0.
José Manuel Arroyo Andrade UNISUCRE
3
Figura 3.2
3.5 COMPONENTES RECTANGULARES DEL PRODUCTO VECTORIAL
⃗ ,𝑩
Al expresar los vectores 𝑨 ⃗⃗ en forma de componentes rectangulares según los
ejes X, Y y Z, se tiene:
⃗𝑨 = 𝐴𝑥 𝒊 + 𝐴𝑦 𝒋 + 𝐴𝑧 𝒌
⃗𝑩
⃗ = 𝐵𝑥 𝒊 + 𝐵𝑦 𝒋 + 𝐵𝑧 𝒌
El producto vectorial ⃗𝑨
⃗ 𝒙𝑩
⃗⃗ está dado por:
⃗ 𝑥𝑩
𝑨 ⃗⃗ = (𝐴𝑥 𝒊 + 𝐴𝑦 𝒋 + 𝐴𝑧 𝒌)𝒙(𝐵𝑥 𝒊 + 𝐵𝑦 𝒋 + 𝐵𝑧 𝒌)
Al aplicar la propiedad distributiva y factorizar:
⃗⃗ 𝒙𝑩
𝑨 ⃗⃗ = 𝐴𝑥 𝒊𝒙𝐵𝑥 𝒊 + 𝐴𝑥 𝒊𝒙𝐵𝑦 𝒋 + 𝐴𝑥 𝒊𝒙𝐵𝑧 𝒌
+ 𝐴𝑦 𝒋𝒙𝐵𝑥 𝒊 + 𝐴𝑦 𝒋𝒙𝐵𝑦 𝒋 + 𝐴𝑦 𝒋𝒙𝐵𝑧 𝒌
+ 𝐴𝑧 𝒌𝒙𝐵𝑥 𝒊 + 𝐴𝑧 𝒌𝒙𝐵𝑦 𝒋 + 𝐴𝑧 𝒌𝒙𝐵𝑧 𝒌
José Manuel Arroyo Andrade UNISUCRE
4
Al reemplazar los resultados de los productos entre los vectores unitarios de
acuerdo a las relaciones (3.6) y agrupar:
⃗ 𝒙𝑩
𝑨 ⃗⃗ = (𝐴𝑦 𝐵𝑧 − 𝐴𝑧 𝐵𝑦 )𝒊 + (𝐴𝑧 𝐵𝑥 − 𝐴𝑥 𝐵𝑧 )𝒋 + (𝐴𝑥 𝐵𝑦 − 𝐴𝑦 𝐵𝑥 )𝒌
⃗ =𝑨
𝑪 ⃗ 𝒙𝑩
⃗⃗ = 𝐶𝑥 𝒊 + 𝐶𝑦 𝒋 + 𝐶𝑧 𝒌
𝐶𝑥 = 𝐴𝑦 𝐵𝑧 − 𝐴𝑧 𝐵𝑦
𝐶𝑦 = 𝐴𝑧 𝐵𝑥 − 𝐴𝑥 𝐵𝑧 (3.7)
𝐶𝑧 = 𝐴𝑥 𝐵𝑦 − 𝐴𝑦 𝐵𝑥
Y en forma de determinantes:
𝒊 𝒋 𝒌
⃗𝑪 = 𝑨
⃗ 𝒙𝑩
⃗⃗ = [ 𝐴𝑥 𝐴𝑦 𝐴𝑧 ] (3.8)
𝐵𝑥 𝐵𝑦 𝐵𝑧
3.6 INTERPRETACIÓN GEOMÉTRICA DEL PRODUCTO VECTORIAL
De acuerdo a la relación (3.1) la magnitud C, del vector ⃗𝑪 como resultado del
producto vectorial de ⃗𝑨𝒙𝑩
⃗⃗ , está dado por:
𝐶 = 𝐴𝐵𝑠𝑒𝑛𝜃
Figura 3.3
Siendo A y B las respectivas magnitudes de los vectores ⃗𝑨 y ⃗𝑩 ⃗ y ϴ el ángulo
entre ellos. Teniendo en cuenta las Figuras 3.3 (a) y (b) se observa que el área
del paralelogramo formado con los vectores 𝑨⃗ y𝑩⃗⃗ como lados, es igual a:
Á𝑟𝑒𝑎 = 𝐴(𝐵𝑠𝑒𝑛𝜃) 𝑜 Á𝑟𝑒𝑎 = 𝐵(𝐴𝑠𝑒𝑛𝛳)
José Manuel Arroyo Andrade UNISUCRE
5
Resultado que concuerda con la relación (3.1), por lo tanto se puede afirmar que
la magnitud C, del vector 𝑪 ⃗ , correspondiente al producto vectorial de 𝑨
⃗ 𝒙𝑩⃗⃗ , es
igual al área del paralelogramo formado con los vectores 𝑨⃗ y𝑩⃗⃗ como lados.
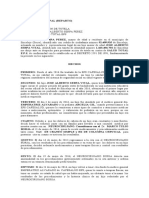
3.7 PROBLEMA EJEMPLO 3.1
En relación con el sólido mostrado en la Figura 3.4, hallar a) el área del
paralelogramo formado con los vectores 𝑨𝑩 ⃗⃗⃗⃗⃗ como lados y b) la distancia
⃗⃗⃗⃗⃗⃗ y 𝑨𝑪
perpendicular CD desde el punto C hasta la línea de acción del vector 𝑨𝑩 ⃗⃗⃗⃗⃗⃗
Figura 3.4
Solución
⃗⃗⃗⃗⃗ con sus respectivas magnitudes, están dados por:
⃗⃗⃗⃗⃗⃗ y 𝑨𝑪
Los vectores 𝑨𝑩
⃗⃗⃗⃗⃗⃗
𝑨𝑩 = 10𝒊 + 4𝒋 − 16𝒌 [𝑐𝑚] 𝐴𝐵 = √102 + 42 + 162 [cm] = 19.28cm
⃗⃗⃗⃗⃗
𝑨𝑪 = 8𝒋 − 16𝒌 [𝑐𝑚] 𝐴𝐶 = √82 + 162 [𝑐𝑚] = 17.88cm
Al aplicar la ecuación (3.2), el vector ⃗𝑽 como resultado del producto
𝑨𝑩 y ⃗⃗⃗⃗⃗
⃗⃗⃗⃗⃗⃗ 𝑨𝑪 da:
𝒊 𝒋 𝒌
⃗𝑽
⃗ = ⃗⃗⃗⃗⃗⃗ ⃗
𝑨𝑩𝒙𝑨𝑪 = [ 10 4 −16] [𝑐𝑚2 ] = 64𝒊 + 160𝒋 + 80𝒌 [𝑐𝑚2 ]
0 8 −16
José Manuel Arroyo Andrade UNISUCRE
6
𝑨𝑩 y ⃗⃗⃗⃗⃗
El área del paralelogramo formado por los vectores ⃗⃗⃗⃗⃗⃗ 𝑨𝑪 como lados es igual
⃗
⃗
a la magnitud V del vector 𝑽, así:
Á𝑟𝑒𝑎 𝑑𝑒𝑙 𝑝𝑎𝑟𝑎𝑙𝑒𝑙𝑜𝑔𝑟𝑎𝑚𝑜 = 𝑉 = √642 + 1602 + 802 [𝑐𝑚2 ] = 189.98𝑐𝑚2
Por lo tanto, la distancia CD desde el punto C hasta la línea de acción del vector
⃗⃗⃗⃗⃗⃗
𝑨𝑩, está dado por:
CD =ACsenϴ= V/AB = 189.98cm2/19.28cm = 9.85cm
3.9 MOMENTO DE UNA FUERZA CON RESPECTO A UN PUNTO
Consideremos una fuerza ⃗𝑭 que actúa en el punto A de un cuerpo rígido y sea O
un punto de referencia en el cuerpo, como se indica en la Figura 3.8(a). La
⃗ desde el punto O hasta el
posición del punto A está definida por el vector 𝒓
punto A, denominado vector de posición de A con respecto a O.
Figura 3.8
La fuerza ⃗𝑭 aplicada en el punto A tiende a producir un movimiento de rotación
del cuerpo alrededor del eje EE’, siendo este un eje que pasa por O y es
perpendicular al plano donde se encuentran 𝒓 ⃗ y𝑭⃗ . Tal efecto se representa
mediante el vector 𝑴 ⃗⃗⃗ 𝑜 denominado momento de la fuerza 𝑭 ⃗ con respecto al
punto O, cuya dirección coincide con dicho eje EE’.
José Manuel Arroyo Andrade UNISUCRE
7
Por las anteriores razones, el momento 𝑴 ⃗⃗⃗ 𝑜 de la fuerza 𝑭
⃗ aplicada en A, con
respecto al punto O, se define como el producto vectorial de 𝒓 ⃗ , así:
⃗ y𝑭
⃗𝑴
⃗⃗ 𝑜 = 𝒓 ⃗
⃗ 𝒙𝑭 (3.9)
Resultando de acuerdo a la definición, un vector 𝑴 ⃗⃗⃗ 𝑜 cuya dirección es
perpendicular al plano donde se encuentran 𝒓 ⃗ y𝑭⃗ , de sentido tal que cumple
con la regla de la mano derecha y su magnitud está dada por:
𝑀𝑜 = 𝑟𝐹𝑠𝑒𝑛𝜃 = 𝐹𝑑 (3.10)
Siendo 𝑑 = 𝑟𝐹𝑠𝑒𝑛𝜃= distancia perpendicular desde el punto O hasta la línea de
acción de la fuerza ⃗𝑭 como se muestra en la Figura 3.8 (b).
El plano formado por los vectores 𝒓 ⃗ y 𝑭 ⃗ , el cual como ya hemos visto, es
perpendicular al vector del momento ⃗𝑴 ⃗⃗ 𝑜 , se denomina plano de acción de la
fuerza ⃗𝑭 y se puede definir como aquel que existe entre la línea de acción de
fuerza ⃗𝑭 y el punto O, donde corta al eje de giro del cuerpo EE’ o línea de acción
del momento ⃗𝑴 ⃗⃗ 𝑜 , siendo perpendiculares entre sí, como se aprecia en la Figura
3.8 (b).
3.10 COMPONENTES RECTANGULARES DEL MOMENTO DE UNA FUERZA
Consideremos una fuerza ⃗𝑭 aplicada en el punto A cuyo vector de posición es 𝒓
⃗,
con respecto al origen O, como se indica en la Figura 3.9. Al expresar ambos
vectores en forma de componentes rectangulares:
⃗ = 𝐹𝑥 𝒊 + 𝐹𝑦 𝒋 + 𝐹𝑧 𝒌
𝑭 ⃗ = 𝑥𝒊 + 𝑦𝒋 + 𝑧𝒌
𝒓
Teniendo en cuenta la expresión (3.9) y reemplazando valores, resulta:
⃗⃗⃗ 𝑜 = 𝒓
𝑴 ⃗ = (𝑥𝒊 + 𝑦𝒋 + 𝑧𝒌)𝒙(𝐹𝑥 𝒊 + 𝐹𝑦 𝒋 + 𝐹𝑧 𝒌)
⃗ 𝒙𝑭
⃗⃗⃗ 𝑜 en forma de componentes rectangulares, se tiene:
Al definir 𝑴
⃗𝑴
⃗⃗ 𝑜 = 𝑀𝑥 𝒊 + 𝑀𝑦 𝒋 + 𝑀𝑧 𝒌 (3.11)
José Manuel Arroyo Andrade UNISUCRE
8
Figura 3.9
Tomando los resultados de la expresión (3.7) para hallar las componentes
rectangulares del producto vectorial y reemplazando valores correspondientes,
se tiene:
𝑀𝑥 = 𝑦𝐹𝑧 − 𝑧𝐹𝑦
𝑀𝑦 = 𝑧𝐹𝑥 − 𝑥𝐹𝑧 (3.12)
𝑀𝑧 = 𝑥𝐹𝑦 − 𝑦𝐹𝑥
En donde 𝑀𝑥 , 𝑀𝑦 𝑦 𝑀𝑧 constituyen las componentes escalares del momento 𝑴 ⃗⃗⃗ 𝑜
de la fuerza ⃗⃗⃗
𝑭 con respecto al punto O, las cuales representan la tendencia de la
⃗⃗⃗
fuerza 𝑭 a imprimir un movimiento de rotación alrededor de los ejes X, Y y Z,
respectivamente. Por lo tanto, en forma de determinantes, queda así:
𝒊 𝒋 𝒌
⃗⃗⃗ 𝑜 = 𝒓
𝑴 ⃗ =[ 𝑥
⃗ 𝒙𝑭 𝑦 𝑧] (3.13)
𝐹𝑥 𝐹𝑦 𝐹𝑧
3.11 PROBLEMA EJEMPLO 3.2
Una tubería OABC, empotrada en el punto O, es sostenida al aplicarle una fuerza
⃗ de magnitud 180N en el punto C, mediante una cadena CD, como se indica en
𝑭
⃗⃗⃗ 𝑜 de la fuerza 𝑭
la Figura 3.10. Hallar el momento 𝑴 ⃗ con respecto al punto O: a)
José Manuel Arroyo Andrade UNISUCRE
9
vectorialmente, por la aplicación directa de la relación (3.9) y b) en forma
escalar, mediante las componentes según los ejes X, Y y Z.
Figura 3.10
Solución (a)
El momento 𝑴⃗⃗⃗ 𝑜 de una fuerza 𝑭
⃗ aplicada en C, con respecto al punto O, se define
como el producto vectorial de 𝒓⃗ y𝑭⃗ , de acuerdo a la expresión (3.9), así:
⃗𝑴
⃗⃗ 𝑜 = 𝒓 ⃗
⃗ 𝒙𝑭 (1)
Se asignan los vectores 𝒓⃗ y ⃗𝑭, como se muestra en la Figura 3.11, siendo 𝒓 ⃗ el
⃗
vector de posición del punto C respecto del punto O y 𝑭 la fuerza ejercida por la
cadena CD, por lo que 𝒓 ⃗ expresado en forma de componentes rectangulares,
queda así:
⃗ = 8𝒊 + 4𝒋 − 5𝒌 [𝑚]
𝒓
Teniendo en cuenta la relación (2.31) la fuerza ⃗𝑭 se expresa en términos de su
magnitud F y un vector unitario ⃗𝝀, así:
𝑭 ⃗𝐹
⃗ =𝝀 (2)
José Manuel Arroyo Andrade UNISUCRE
10
De acuerdo a la Figura 3.11, el vector unitario ⃗𝝀 se obtiene así:
⃗⃗⃗⃗⃗⃗
𝑪𝑫 4 𝒊 + 7𝒋 − 4𝒌 4𝒊+7𝒋−4𝒌
⃗𝝀 = = =
𝐶𝐷 √42 + 72 + 42 9
Figura 3.11
Dado que F = 180N, al reemplazar valores en (2):
4 7 4
⃗ = ( 𝒊 + 𝒋 − 𝑘) 180 [N] = 80𝒊 + 140𝒋 − 80𝒌 [N]
𝑭
9 9 9
En la Figura 3.12 (a) se muestran los vectores 𝒓⃗ y ⃗𝑭 en forma de componentes.
Al resolver ⃗𝑴
⃗⃗ 𝑜 en forma de determinantes según ecuación (3.13):
𝒊 𝒋 𝒌 𝒊 𝒋 𝒌
⃗𝑴
⃗⃗ 𝑜 = 𝒓 ⃗
⃗ 𝒙𝑭 = [ 𝑥 𝑦 𝑧] = [ 8 4 −5 ] [𝑁𝑚]
𝐹𝑥 𝐹𝑦 𝐹𝑧 80 140 −80
José Manuel Arroyo Andrade UNISUCRE
11
⃗𝑴
⃗⃗ 𝑜 = +380𝒊 + 240𝒋 + 800𝒌 [𝑁𝑚]
Solución (b)
Al descomponer el momento 𝑴 ⃗⃗⃗ 𝑜 en forma de componentes rectangulares, según
los ejes X, Y y Z, teniendo en cuenta la ecuación (3.11), se tiene:
⃗𝑴
⃗⃗ 𝑜 = 𝑀𝑥 𝒊 + 𝑀𝑦 𝒋 + 𝑀𝑧 𝒌 (3)
En donde 𝑀𝑥 , 𝑀𝑦 𝑦 𝑀𝑧 constituyen las componentes escalares del momento 𝑴 ⃗⃗⃗ 𝑜
de la fuerza ⃗⃗⃗
𝑭 con respecto al punto O, las cuales representan la tendencia de la
⃗⃗⃗
fuerza 𝑭 a imprimir un movimiento de rotación alrededor de los ejes X, Y y Z,
respectivamente.
Figura 3.12
José Manuel Arroyo Andrade UNISUCRE
12
Para hallar la componente escalar 𝑀𝑥 se realiza la sumatoria de momentos
alrededor del eje X, para lo cual se toman las magnitudes de las componentes
⃗ y ⃗𝑭 en el plano YZ, como se muestra en la Figura 3.12 (b), siendo:
escalares de 𝒓
𝑀𝑥 = +(5𝑚)(140𝑁) − (4𝑚)(80𝑁) = +700𝑁𝑚 − 320𝑁𝑚 = +380𝑁𝑚
Los signos se toman de acuerdo al sentido de giro causado, al aplicar la regla de
la mano derecha, como lo indican las flechas curvas, teniendo en cuenta si
apuntan hacia el lado positivo o negativo del eje X, como se muestra en la Figura
3.12 (b).
Asimismo, para encontrar la componente escalar 𝑀𝑦 , se efectúa la sumatoria
⃗ y ⃗𝑭, en
con las correspondientes magnitudes de las componentes escalares de 𝒓
el plano XZ, como se indica en la Figura 3.12 (c), en donde:
𝑀𝑦 = +(8𝑚)(80𝑁) − (5𝑚)(80𝑁) = +640𝑁𝑚 − 400𝑁𝑚 = +240𝑁𝑚
Considerando los signos según el sentido de giro y la aplicación de la regla de la
mano derecha, como lo indican las flechas curvas, de acuerdo a si señalan hacia
el eje positivo o negativo de la Y, como se aprecia en la Figura 3.12 (c).
Por último, la componente escalar 𝑀𝑧 , se obtiene mediante la sumatoria de las
correspondientes magnitudes de las componentes escalares de 𝒓 ⃗ y ⃗𝑭, en el
plano XY, como se indica en la Figura 3.12 (d), por lo que:
𝑀𝑧 = +(8𝑚)(140𝑁) − (4𝑚)(80𝑁) = +1120𝑁𝑚 − 320𝑁𝑚 = +800𝑁𝑚
Y de forma similar a los anteriores, los signos se toman de acuerdo al giro
causado alrededor del eje Z y la aplicación de la regla de la mano derecha,
teniendo en cuenta si apuntan hacia el lado positivo o negativo, como los
ilustran las flechas curvas de la Figura 3.12 (d).
Por último, al sustituir valores en la relación (2):
José Manuel Arroyo Andrade UNISUCRE
13
⃗𝑴
⃗⃗ 𝑜 = +380𝒊 + 240𝒋 + 800𝒌 [𝑁𝑚]
3.12 PROBLEMA EJEMPLO 3.3
Una fuerza 𝑭⃗ de magnitud 150 N pasa por los puntos A y B, como se indica en la
Figura 3.13. Calcular el momento 𝑴 ⃗⃗⃗ 𝑜 de la fuerza 𝑭
⃗ con respecto al punto O: a)
tomando como 𝒓 ⃗ el vector de posición del punto A, b) tomando como 𝒓 ⃗ el vector
⃗⃗⃗
de posición del punto B, c) dibujar el vector correspondiente a 𝑴𝑜 d) hallar la
distancia perpendicular desde el punto O hasta la línea de acción de la fuerza ⃗𝑭.
Figura 3.13
Solución (a)
Se encuentra el vector de posición del punto A, el cual está dado por:
⃗ 𝐴 = 3.5𝒊 + 5𝒌[𝑚]
𝒓
⃗ 𝐴𝐵 , con los puntos A y B por donde pasa la fuerza
Se define un vector unitario 𝝀
⃗ , así:
𝑭
2.5 𝒊 + 5 𝒋 − 5 𝒌 2.5 5 5
⃗ 𝐴𝐵 =
𝝀 = 𝒊+ 𝒋− 𝒌
√(2.5)2 + (5)2 + (5)2 7.5 7.5 7.5
Se aplica la relación ⃗𝑭 = ⃗𝝀𝐴𝐵 𝐹 siendo F = 150N la magnitud de ⃗𝑭, así:
José Manuel Arroyo Andrade UNISUCRE
14
2.5(150) 5(150) 5(150)
⃗𝑭 = 𝒊+ 𝒋− 𝒌 [N] = 50𝒊 + 100𝒋 − 100𝒌[N]
7.5 7.5 7.5
Por último se remplazan valores en la ecuación de momento ⃗𝑴
⃗⃗ 𝑜 = 𝒓 ⃗,
⃗ 𝐴 𝒙𝑭
realizando el respectivo producto vectorial:
𝒊 𝒋 𝒌
⃗𝑴
⃗⃗ 𝑜 = [ 3.5 0 5 ] [𝑁𝑚] = −500 𝒊 + 600 𝒋 + 350 𝒌 [𝑁𝑚]
50 100 −100
Solución (b)
El vector de posición correspondiente al punto B es:
⃗ 𝐴 = 6𝒊 + 5𝒋[𝑚]
𝒓
⃗⃗⃗ 𝑜 = 𝒓
Y al reemplazar valores en la ecuación de momento, 𝑴 ⃗ , el resultado es:
⃗ 𝐵 𝒙𝑭
𝒊 𝒋 𝒌
⃗𝑴
⃗⃗ 𝑜 = [ 6 5 0 ] [𝑁𝑚] = −500 𝒊 + 600 𝒋 + 350 𝒌 [𝑁𝑚]
50 100 −100
Nótese que el momento 𝑴 ⃗⃗⃗ 𝑜 es igual si se toma como vector de posición 𝒓
⃗𝐴 𝑜
⃗ 𝐵 , en términos generales, puede ser el cualquier punto que se encuentre sobre
𝒓
la línea de acción de la fuerza ⃗𝑭, dándole a ⃗𝑭 la propiedad de ser un vector
deslizante, propiedad conocida también con el nombre de Principio de
Transmisibilidad, el cual será enunciado en la siguiente sección.
Solución (c)
El plano de acción de la fuerza ⃗𝑭 comprende el plano definido por el punto O y la
línea de acción de la fuerza, siendo ⃗𝑴⃗⃗ 𝑜 perpendicular a dicho plano. En la Figura
3.14 se muestra el vector ⃗𝑴
⃗⃗ 𝑜 y el plano definido por los vectores 𝒓 ⃗ 𝐵 y ⃗𝑭.
⃗ 𝐴, 𝒓
José Manuel Arroyo Andrade UNISUCRE
15
Figura 3.14
Solución (d)
La distancia d requerida se encuentra mediante la ecuación (3.10), así:
𝑀𝑜 = 𝑟𝐹𝑠𝑒𝑛𝜃 = 𝐹𝑑
𝑀𝑜 = −500𝒊 + 600𝒋 + 350𝒌[𝑁𝑚]
Mo = √5002 + 6002 + 3502 [𝑁𝑚] = 855.86𝑁𝑚
𝑀𝑜 855.86𝑁𝑚
𝑑= = = 5.7𝑚
𝐹 150𝑁
3.13 PRINCIPIO DE TRANSMISIBILIDAD
El principio de transmisibilidad establece que el estado de equilibrio de un
cuerpo rígido no es alterado si una fuerza 𝑭 ⃗ aplicada en un punto A es
reemplazada por otra fuerza ⃗⃗⃗
𝑭′ aplicada en otro punto B, como se ilustra en la
Figura 3.15, siempre que las dos fuerzas tengan la misma línea de acción, la
misma magnitud y el mismo sentido. Se dice entonces que ⃗𝑭 y ⃗⃗⃗ 𝑭′ son
equivalentes debido a que producen el mismo efecto sobre el cuerpo.
José Manuel Arroyo Andrade UNISUCRE
16
Figura 3.15
3.14 MOMENTO DE UNA FUERZA EN EL PLANO
En muchos casos es conveniente calcular los momentos con respecto a un punto
O, de una o varias fuerzas contenidas en el mismo plano, para lo cual se
simplifica al realizar la sumatoria de las mismas en forma escalar. Consideremos
una fuerza ⃗𝑭, de magnitud F que actúa en el punto A de una placa plana y sea 𝒓 ⃗
el vector de posición del punto A respecto del origen O, de un sistema de
coordenadas OXYZ, en donde el vector 𝒓 ⃗ están contenidos en
⃗ y la fuerza fuerza 𝑭
el plano XY, siendo por lo tanto perpendiculares al eje Z, como se indica en la
Figura 3.16.
Figura 3.16
José Manuel Arroyo Andrade UNISUCRE
17
Teniendo en cuenta la definición dada en la sección (3.9), la fuerza ⃗𝑭 tiende a
producir un movimiento de rotación de la placa alrededor del eje Z, denominado
Momento de la fuerza 𝑭 ⃗ con respecto al punto O, designado 𝑴 ⃗⃗⃗ 𝑜 , el cual es un
vector cuya dirección coincide con dicho eje de giro y su sentido se determina al
aplicar la regla de la mano derecha como se muestra en la Figura 3.16. De
acuerdo a la relación (3.10), la magnitud Mo del momento está dada por:
𝑀𝑜 = 𝑟𝐹𝑠𝑒𝑛𝜃 = 𝐹𝑑
Siendo 𝑑 = 𝑟𝑠𝑒𝑛𝜃 = distancia perpendicular desde el punto O hasta la línea de
acción de la fuerza ⃗𝑭, como se indica también en la Figura 3.16.
Figura 3.17
⃗ 1, 𝑭
Si se tienen varias fuerzas 𝑭 ⃗ 2𝑦 𝑭
⃗ 3 en el plano XY, como se ilustra en la
Figura 3.17 (a), el momento resultante con respecto al punto O, es igual a la
suma algebraica de los momentos de cada una de las fuerzas, o sea:
∑𝑀𝑜 = +𝐹1 𝑑1 − 𝐹2 𝑑2 + 𝐹3 𝑑3
Lo anterior se cumple porque al tratarse de fuerzas contenidas en el mismo
plano XY, los momentos con respecto al origen O, son vectores cuyas direcciones
coinciden con el eje Z, aunque los signos se especifican conforme al sentido de
giro, los cuales se determinan al aplicar la regla de la mano derecha. De tal
José Manuel Arroyo Andrade UNISUCRE
18
forma que, de acuerdo a lo mostrado en la Figura 3.17 (a), para las fuerzas que
ocasionen giros anti horarios, como 𝑭 ⃗1𝑦 𝑭⃗ 3 , los vectores de sus momentos
estarán señalando hacia afuera del plano XY, o eje positivo de las Z, por lo cual
se consideran positivos, mientras que los momentos de las fuerzas que causen
giros horarios como 𝑭⃗ 2 , se tomarán como negativos porque sus vectores estarán
dirigidos hacia dentro de dicho plano XY, o eje negativo de las Z.
En el caso en que la línea de acción de la fuerza 𝑭 ⃗ pase por un punto
determinado A, como el mostrado en la Figura 3.17 (b), el momento con
respecto a dicho punto es igual a cero porque de acuerdo a la ecuación (3.10) le
corresponde una distancia perpendicular d igual a cero, por tanto:
𝑀𝐴 = 𝐹𝑑 = 𝐹(0) = 0
3.15 PROBLEMA EJEMPLO 3.4
Una palanca AOB, con apoyo en el punto O, es utilizada para levantar un peso W
al aplicar una fuerza F, como se indica en la Figura 3.18. La ventaja mecánica
(VM) de dicha palanca, expresa la relación entre el peso W levantado y la fuerza
F requerida. Si la suma de los momentos, de la fuerza y del peso, con respecto al
punto O es igual a cero, hallar: a) La ventaja mecánica (VM) si el brazo de la
fuerza b1 es igual a diez veces el brazo b2 correspondiente al peso. b) La fuerza
necesaria F para levantar un peso W = 120 N.
Solución (a)
Al tomar sumatoria de momentos con respecto al punto O e igualar a cero, se
tiene:
Mo = + Fb1 – Wb2 = 0 Fb1 = Wb2 W/F = b1/b2
Figura 3.18
José Manuel Arroyo Andrade UNISUCRE
19
O sea: VM = W/F = b1/b2, si b1 = 10b2, entonces VM = 10b1/b1 = 10
VM = 10
Solución (b)
VM = W/F = 10, o sea F = W/VM, si W = 120 N entonces F = 120 N/10 = 12 N
F = 12 N
3.16 PRINCIPIO DE LOS MOMENTOS O TEOREMA DE VARIGNON
Consideremos una fuerza 𝑭 ⃗ y sean 𝑭
⃗ 1y𝑭
⃗ 2 sus componentes, o sea: 𝑭
⃗ =𝑭 ⃗ 1+𝑭
⃗ 2,
como se muestra en la Figura 3.19 y sea 𝒓 ⃗ el vector de posición del punto de
aplicación A de la fuerza, con respecto a un punto de referencia O. El Principio
de los Momentos o también denominado Teorema de Varignon, establece que el
momento de una fuerza ⃗𝑭 con respecto a un punto O es igual a la suma de los
momentos de las componentes con respecto al punto. De tal manera que en
forma vectorial se puede expresar como:
⃗𝑴
⃗⃗ 𝑜 = ⃗𝒓𝒙𝑭
⃗ = ⃗𝒓𝒙(𝑭1 + 𝑭2 ) = ⃗𝒓𝒙𝑭1 + ⃗𝒓𝒙𝑭2
Figura 3.19
El principio de los momentos queda demostrado a partir de la propiedad
distributiva de la suma del producto vectorial, enunciada mediante la relación
⃗ cuando resulte más fácil
(3.5) y es útil para hallar el momento de una fuerza 𝑭
definir el momento de cada una de las componentes y sumarlas, como se verá en
el ejemplo dado a continuación.
José Manuel Arroyo Andrade UNISUCRE
20
3.17 PROBLEMA EJEMPLO 3.5
El mástil OA de altura 6m es sometido a una fuerza de 100N aplicada en el punto
B mediante una cuerda BC, la cual forma un ángulo de 55° con la horizontal,
como se indica en la Figura 3.20. Hallar el momento de la fuerza con respecto al
punto O.
Figura 3.20
Solución (a) Forma Vectorial
Se expresa la fuerza en forma vectorial así:
⃗ = 100cos55°𝒊 − 100𝑠𝑒𝑛55°𝒋[N] = 57.35𝒊 − 81.91𝒋[N]
𝑭
Se define un vector de posición 𝒓 ⃗ , el cual como ya se ha visto en el Problema
Ejemplo 3.3, al tener en cuenta el principio de transmisibilidad, se puede tomar
para el caso actual el punto B o el C, por lo que al escoger B, se tiene:
⃗ 𝐵 = 1.2𝒊 + 6𝒋[𝑚]
𝒓
José Manuel Arroyo Andrade UNISUCRE
21
Y al sustituir en la ecuación de momento, ⃗𝑴
⃗⃗ 𝑜 = 𝒓 ⃗ , se obtiene:
⃗ 𝐵 𝒙𝑭
𝒊 𝒋 𝒌
⃗𝑴
⃗⃗ 𝑜 = 𝒓 ⃗
⃗ 𝐵 𝒙𝑭 = [ 1.2 6 0 ] [𝑁𝑚] = −442.39 𝒌 [𝑁𝑚]
57.35 −81.91 0
Solución (b) Forma Escalar
En la Figura 3.20 se aprecia que la fuerza ⃗𝑭 se encuentra expresada en forma de
componentes en el punto C, por lo cual y de acuerdo al ya visto Principio de los
Momentos, el momento con respecto al punto O se puede calcular también
mediante la suma de los momentos de la componentes con respecto al mismo
punto O, por tanto:
∑𝑀𝑜 = (100𝑐𝑜𝑠55°)(0) − (100𝑠𝑒𝑛55°)(1.2𝑚 + 𝑑)
Siendo d = 6m/tg55° = 4.2m, al reemplazar se tiene:
∑𝑀𝑜 = 0 − (100𝑠𝑒𝑛55°)(1.2𝑚 + 𝑑) = −442.34𝑁𝑚
Obteniéndose el mismo resultado, de manera más sencilla y fácil mediante la
solución escalar, sumando los momentos de las componentes, teniendo en
cuenta además, que las fuerzas se encuentran contenidas en el mismo plano.
3.26 MOMENTO DE UN PAR
Por definición, un par está formado por dos fuerzas ⃗𝑭 y − ⃗𝑭 de igual magnitud y
sentidos opuestos, cuyas líneas de acción son paralelas y separadas una
distancia perpendicular determinada d, como se ilustra en la Figura 3.26.
El par de fuerzas tiene las siguientes características:
• No produce efecto de traslación alguno, porque la sumatoria de las
fuerzas que lo conforman, 𝑭 ⃗ y −𝑭
⃗ con respecto a cualquier punto, da
una resultante igual a cero.
• ⃗⃗⃗
Solamente ocasiona acción de rotación, representado por un vector 𝑴
denominado momento del par, lo cual tiene importantes aplicaciones
José Manuel Arroyo Andrade UNISUCRE
22
prácticas, como en el caso mostrado en la Figura 3.26, para soltar o
apretar las tuercas de las ruedas de un vehículo, mediante una llave de
cruz.
Figura 3.26
El momento ⃗𝑴⃗⃗ del par se halla al realizar la sumatoria de momentos de las dos
fuerzas con respecto a un punto O, de acuerdo a la Figura 3.27 (a), así:
⃗⃗⃗ 𝑜 :
∑𝑴 ⃗ +𝒓
⃗ 𝐴 𝒙𝑭
𝒓 ⃗)=𝒓
⃗ 𝐵 𝒙(−𝑭 ⃗ −𝒓
⃗ 𝐴 𝒙𝑭 ⃗ = (𝒓
⃗ 𝐵 𝒙𝑭 ⃗𝐴 −𝒓 ⃗ =𝒓
⃗ 𝐵 )𝒙𝑭 ⃗
⃗ 𝒙𝑭
⃗ =𝒓
Siendo: 𝒓 ⃗𝐴 −𝒓⃗ 𝐵 = vector que va desde el punto B hasta el punto A y el
momento del par está dado por:
⃗⃗⃗ = 𝒓
𝑴 ⃗
⃗ 𝒙𝑭 (3.19)
Figura 3.27
José Manuel Arroyo Andrade UNISUCRE
23
Al realizar nuevamente la sumatoria de momentos del par con respecto a un
punto de referencia O’ diferente de O, tal como se muestra en la Figura 3.27 (b),
se obtiene el siguiente resultado:
⃗⃗⃗ 𝑂′ :
∑𝑴 ⃗⃗⃗ ⃗ + ⃗⃗⃗
𝒓′𝐴 𝒙𝑭 𝒓′𝐵 𝒙(−𝑭 ⃗ − ⃗⃗⃗
⃗ ) = 𝑟′𝐴 𝒙𝑭 𝒓′𝐵 𝒙𝑭 ⃗⃗⃗ 𝐴 − ⃗⃗⃗
⃗ = (𝒓′ ⃗ =𝒓
𝒓′𝐵 ) 𝒙𝑭 ⃗
⃗ 𝒙𝑭
⃗⃗⃗ 𝐴 − 𝒓′
⃗ = 𝒓′
Siendo: 𝒓 ⃗⃗⃗ 𝐵 = vector que va desde el punto B hasta el punto A y el
nuevo momento del par está dado por:
⃗⃗⃗ = 𝒓
𝑴 ⃗
⃗ 𝒙𝑭 (3.20)
Comparando las relaciones (3.19) y (3.20) se observa que el resultado es el
mismo independientemente del punto de referencia escogido, por lo tanto el
momento 𝑴 ⃗⃗⃗ del par, produce el mismo efecto de forma indiferente al punto al
cual se considere aplicado, lo cual significa que es un vector libre.
Figura 3.28
Por otro lado y de acuerdo a la definición del momento 𝑴 del par, su magnitud
se puede expresar así:
𝑀 = 𝑟𝐹𝑠𝑒𝑛𝜃 = 𝐹𝑑 (3.21)
𝑑 = 𝑑𝑖𝑠𝑡𝑎𝑛𝑐𝑖𝑎 𝑒𝑛𝑡𝑟𝑒 𝑙𝑎𝑠 𝑙í𝑛𝑒𝑎𝑠 𝑑𝑒 𝑎𝑐𝑐𝑖ó𝑛 𝑑𝑒 ⃗⃗⃗
𝑭 𝑦 − ⃗𝑭, 𝑣𝑒𝑟 𝑙𝑎 𝐹𝑖𝑔𝑢𝑟𝑎 3.28
José Manuel Arroyo Andrade UNISUCRE
24
Además, el momento ⃗𝑴 ⃗⃗ del par, como se indica en la Figura 3.28, es un vector
que actúa en la dirección perpendicular al plano donde se encuentran ⃗𝑭 y
− ⃗𝑭 y su sentido es tal que cumple con la regla de la mano derecha.
3.27 SUMA DE PARES
El par puede ser representado por un vector 𝑴 ⃗⃗⃗ , correspondiente al momento
del par, el cual como ya se ha visto, es perpendicular al plano donde se
encuentran las fuerzas ⃗𝑭 y − ⃗𝑭 que lo originan, de sentido tal que cumple con la
regla de la mano derecha y debido a que es un vector libre, puede ser colocado a
partir de un punto común con otro par y ser sumados vectorialmente, para
hallar un par resultante o equivalente a los dos pares, el cual produce el mismo
el efecto de rotación que los dos pares aplicados en su conjunto. Tal
procedimiento será utilizado en el siguiente ejemplo.
3.28 PROBLEMA EJEMPLO 3.8
En relación con los dos pares aplicados al sólido de la Figura 3.29. Hallar el par
equivalente a los dos pares dados.
Figura 3.29
Solución
Se designan los momentos de los pares así:
José Manuel Arroyo Andrade UNISUCRE
25
⃗𝑴
⃗⃗ 1 = momento del par de 48𝑁 ⃗𝑴
⃗⃗ 2 = momento del par de 200𝑁
Se aplica la relación (3.19):
⃗⃗⃗ 1 = 𝒓
𝑴 ⃗1
⃗ 1 𝒙𝑭 ⃗⃗⃗ 2 = 𝒓
𝑴 ⃗2
⃗ 2 𝑥𝑭
Para hallar el momento del par es necesario aplicar la relación (3.19) dada por
⃗⃗⃗ = 𝒓
𝑴 ⃗ , aunque debido a que en un par existen dos fuerzas 𝑭
⃗ 𝒙𝑭 ⃗ y dos vectores 𝒓
⃗,
iguales y de sentidos opuestos, se debe escoger solo una fuerza 𝑭 ⃗ y un vector 𝒓
⃗.
El procedimiento consiste en seleccionar primero una de las dos fuerzas 𝑭 ⃗ y el
vector 𝒓⃗ correcto, corresponde al que apunte hacia dicha fuerza escogida, como
se verá a continuación.
Por ejemplo, en el caso específico del par de 48N, si se escoge la fuerza ⃗𝑭1 =
48𝑁𝒌, dirigida hacia el lado positivo del eje Z, como se indica en la Figura 3.29,
le corresponde fuerzas 𝒓⃗ 1 = 10𝑚𝒋, porque apunta hacia la fuerza escogida, por
tanto:
𝒊 𝒋 𝒌
⃗⃗⃗ 1 = 𝒓
𝑴 ⃗ 1=[0
⃗ 1 𝒙𝑭 10 0 ] [𝑁𝑚] = 480𝒊[𝑁𝑚]
0 0 48
En cuanto al par de 200N, se ha elegido ⃗𝑭2 orientado hacia el lado positivo del
⃗ 2 = −12𝑚𝒌, por estar dirigida hacia ⃗𝑭2 , como se
eje Y, a la cual le corresponde 𝒓
aprecia en la Figura 3.29, siendo:
−8𝑖 + 6𝑗
𝑭 ⃗ 2 𝐹2 = (
⃗2=𝝀 ) (200𝑁) = −160𝒊 + 120𝒋[𝑁]
√82 + 62
𝒊 𝒋 𝒌
⃗⃗⃗ 2 = 𝒓
𝑴 ⃗𝟐=[
⃗ 2 𝒙𝑭 0 0 −12] [𝑁𝑚] = 1440𝒊 − 1920𝒋 [𝑁𝑚]
−160 120 0
Una vez se han determinado los momentos de los pares, en forma vectorial y
por el hecho de ser vectores libres, se pueden colocar a partir de un mismo
José Manuel Arroyo Andrade UNISUCRE
26
punto para sumarlos y obtener un momento resultante. Como se muestra en la
Figura 3.30 (a), se ha escogido un punto común arbitrario A.
Figura 3.30
O sea que el momento resultante o momento del par equivalente está dado por:
⃗𝑴
⃗⃗ 𝑅 = ⃗𝑴
⃗⃗ 1 + ⃗𝑴
⃗⃗ 2 = 1920𝑖 + 1920𝑗[𝑁𝑚]
⃗⃗⃗ 𝑅 , ubicado en
En la Figura 3.30 (b), se aprecia el momento del par resultante 𝑴
el punto A.
3.29 SISTEMAS EQUIVALENTES DE FUERZAS
Los sistemas aplicados a un cuerpo rígido, se caracterizan por su tendencia a
producir acciones de traslación debidas a las fuerzas que intervienen y también
de rotación, ocasionados por los momentos de las mismas, con respecto a un
punto determinado. En lo que respecta al equilibrio de un cuerpo rígido, dos
sistemas de fuerzas son equivalentes, si tienden a producir los mismos efectos
de traslación y las mismas acciones de rotación sobre dicho cuerpo.
En forma de ecuaciones, se puede expresar que dos sistemas aplicados a un
cuerpo rígido son equivalentes, si la sumatoria de las fuerzas y la sumatoria de
los momentos con respecto a un punto O, son iguales respectivamente, o sea:
⃗ )1 = (∑𝑭
(∑𝑭 ⃗ )2 ⃗⃗⃗ )1 = (∑𝑴
(∑𝑴 ⃗⃗⃗ )2 (3.23)
Se puede demostrar que si dos sistemas de fuerzas que actúan sobre un cuerpo
rígido son equivalentes con respecto a un punto O, también lo son con respecto
a cualquier punto O’.
José Manuel Arroyo Andrade UNISUCRE
27
Expresando la relación (3.23) en términos de sus componentes rectangulares
según los ejes X, Y y Z tenemos:
(∑𝐹𝑥 )1 = (∑𝐹𝑥 )2 (∑𝐹𝑦 )1 = (∑𝐹𝑦 )2 (∑𝐹𝑧 )1 = (∑𝐹𝑧 )2
(∑𝑀)1 = (∑𝑀𝑥 )2 (∑𝑀𝑦 )1 = (∑𝑀𝑦 )2 (∑𝑀𝑧 )1 = (∑𝑀𝑧 )2
Lo cual indica que dos sistemas de fuerzas son equivalentes si tienden a
producir los mismos efectos de traslación, al comparar componente a
componente, y también las mismas acciones de rotación componente a
componente, de acuerdo a los ejes X, Y y Z, respectivamente.
3.30 PROBLEMA EJEMPLO 3.9
Dos fuerzas de 100N y 150N son aplicadas a la viga OA como se indica en la
Figura 3.31 (a). (a) Hallar la fuerza 𝑭⃗ y la correspondiente distancia x, de
acuerdo a la figura 3.31 (b), para que los dos sistemas sean equivalentes, con
respecto al punto O. (b) Demostrar que los dos sistemas también son
equivalentes con respecto al punto A.
Figura 3.31
Solución (a)
Los dos sistemas son equivalentes, con respecto al punto O, si y solo si se
cumplen las igualdades (3.23) dada por:
⃗ )1 = (∑𝑭
(∑𝑭 ⃗ )2 ⃗⃗⃗ 𝑜 )1 = (∑𝑴
(∑𝑴 ⃗⃗⃗ 𝑜 )2
Al igualar las fuerzas en los dos sistemas, se tiene:
José Manuel Arroyo Andrade UNISUCRE
28
⃗ )1 = (∑𝑭
(∑𝑭 ⃗ )2 : − 100𝑁𝒋 − 150𝑁𝒋 = −250𝑁𝒋 = ⃗𝑭 ⃗𝑭 = −250𝑁𝒋
Al tomar momentos con respecto al punto O e igualar:
⃗⃗⃗ 𝑜 )1 = −(6𝑚)(100𝑁)𝒌 − (16𝑚)(150𝑁)𝒌 = −3000𝑁𝑚𝒌
(∑𝑴
𝒊 𝒋 𝒌
⃗⃗⃗ ⃗
⃗ 𝒙𝑭 = [ 𝑥
(∑𝑴𝑜 )2 = 𝒓 0 0 ] [𝑁𝑚] = −250𝑥𝒌 [𝑁]
0 −250 0
−3000𝑁𝑚 = −250𝑥𝑁 𝑥 = 12𝑚
Se concluye que la fuerza de 250N aplicada a una distancia de 12m, relativo al
punto O, como se indica en la Figura 3.31 (b), es equivalente a las dos fuerzas de
100N y 150N, actuando a las respectivas distancias de 6m y 16m, con respecto
al mismo punto O, como se ilustra en la Figura 3.31 (a).
Solución (b)
Los dos sistemas son equivalentes, con respecto al punto A, si y solo si se
cumplen las igualdades (3.23) dada por:
⃗ )1 = (∑𝑭
(∑𝑭 ⃗ )2 ⃗⃗⃗ 𝐴 )1 = (∑𝑴
(∑𝑴 ⃗⃗⃗ 𝐴 )2
Al igualar las fuerzas en los dos sistemas, se tiene:
⃗ )1 = (∑𝑭
(∑𝑭 ⃗ )2 : − 100𝑁𝒋 − 150𝑁𝒋 = −250𝑁𝒋 = ⃗𝑭 ⃗𝑭 = −250𝑁𝒋
Tomando momentos con respecto al punto A e igualando:
⃗⃗⃗ 𝐴 )1 = +(14𝑚)(100𝑁)𝒌 + (4𝑚)(150𝑁)𝒌 = +2000𝑁𝑚𝒌
(∑𝑴
𝒊 𝒋 𝒌
⃗⃗⃗ ⃗⃗⃗ ⃗
(∑𝑴𝐴 )2 = 𝒓′𝒙𝑭 = [ 𝑥′ 0 0 ] [𝑁𝑚] = −250𝑥′𝒌 [𝑁𝑚]
0 −250 0
José Manuel Arroyo Andrade UNISUCRE
29
+2000𝑁𝑚 = −250𝑥 ′ 𝑁 𝑥 ′ = − 8𝑚
El signo negativo de x’, como se aprecia en la Figura 3.31 (b), indica que la
distancia se encuentra a la izquierda del punto A, por tanto se demuestra que la
posición de la fuerza ⃗𝑭 es la misma, independiente del punto de referencia, o
sea, los dos sistemas son equivalentes con respecto a O y también respecto a un
punto diferente A.
3.31 SISTEMA FUERZA PAR EQUIVALENTE
Una fuerza 𝑭⃗ que actúa en un punto A de un cuerpo rígido, como se indica en la
Figura 3.32 (a), es equivalente a la misma fuerza 𝑭 ⃗ aplicada en un punto
diferente O, como se muestra en la Figura 3.32 (b), si se le adiciona un par de
momento ⃗𝑴 ⃗⃗ = 𝒓 ⃗ , siendo 𝒓
⃗ 𝒙𝑭 ⃗ el vector de posición del punto A respecto del
punto O.
Figura 3.32
Al conjunto así formado en el punto O, como se aprecia en la Figura 3.32 (b),
compuesto por la fuerza ⃗𝑭, que constituye el efecto de traslación y el par de
momento ⃗𝑴 ⃗⃗ , que representa la acción de rotación, se le denomina sistema
fuerza-par equivalente, porque produce los mismos efectos de traslación y de
rotación que la fuerza original ⃗𝑭 aplicada en el punto A, por tanto no afecta el
estado de equilibrio del cuerpo rígido, sobre el cual actúa.
Demostración
José Manuel Arroyo Andrade UNISUCRE
30
Se igualan tanto las fuerzas como los momentos, en los puntos A y O, de acuerdo
a las relaciones (3.23), dadas por:
⃗ )1 = (∑𝑭
(∑𝑭 ⃗ )2 ⃗⃗⃗ 𝑜 )1 = (∑𝑴
(∑𝑴 ⃗⃗⃗ 𝑜 )2
En lo referente a las fuerzas se tiene:
⃗ )1 = (∑𝑭
(∑𝑭 ⃗ )2 = 𝑭
⃗
⃗ es igual
Indicando que la acción de traslación es la misma puesto que la fuerza 𝑭
en ambos casos, como se muestra en las Figuras 3.32 (a) y (b).
Al tomar momentos e igualar:
⃗⃗⃗ 𝑜 )1 = 𝒓
(∑𝑴 ⃗
⃗ 𝒙𝑭 ⃗⃗⃗ 𝑜 )2 = 𝑴
(∑𝑴 ⃗⃗⃗ ⃗⃗⃗ = 𝒓
𝑴 ⃗
⃗ 𝒙𝑭
Dando como resultado que se obtiene el mismo efecto de rotación, al ser iguales
el momento ⃗𝑴⃗⃗ del par y el momento de la fuerza ⃗𝑭 con respecto al punto O,
dado por 𝒓 ⃗ , siendo 𝒓
⃗ 𝒙𝑭 ⃗ el vector de posición del punto A respecto del punto O,
como se aprecia en la Figura 3.32 (a).
Como características del sistema fuerza par equivalente se deben tener en
cuenta las siguientes:
• Por ser el momento ⃗𝑴
⃗⃗ del par un vector libre, produce el mismo efecto si
se coloca en el punto O, en el punto A o en cualquier otro punto del
cuerpo.
• ⃗⃗⃗ = 𝒓
Siendo el momento del par 𝑴 ⃗ , resulta ser un vector perpendicular
⃗ 𝒙𝑭
al plano donde se encuentran 𝒓⃗ y𝑭⃗.
El proceso de trasformar una fuerza ⃗𝑭, aplicada en un punto A, como se muestra
en la Figura 3.32 (a), en un sistema fuerza par, formado por la misma fuerza ⃗𝑭 y
un par de momento ⃗𝑴 ⃗⃗ , que actúa en un punto O, como se aprecia en la Figura
3.32 (b), los cuales resultan ser respectivamente perpendiculares, se puede
utilizar de manera inversa para convertir un sistema fuerza par aplicado en un
José Manuel Arroyo Andrade UNISUCRE
31
punto determinado O, en una sola fuerza ⃗𝑭 que actúa en un punto A, con la
condición de que la fuerza ⃗𝑭 se pueda trasladar en un plano perpendicular al
momento ⃗𝑴 ⃗⃗ , hasta el punto donde se genere un momento igual al momento ⃗𝑴⃗⃗
del par, que se desea eliminar. Tales procedimientos se estudiarán más adelante
en la sección (3.35), acerca de Conversiones de Sistemas Equivalentes de
Fuerzas.
3.32 PROBLEMA EJEMPLO 3.10
Convertir la fuerza ⃗𝑭 de magnitud 100N, aplicada en el punto A, cuya línea de
acción pasa por los puntos A y D, como se muestra en la Figura 3.34 (a), en un
sistema fuerza par en el punto B.
Solución
⃗ aplicada en el punto A, como se muestra en la Figura 3.34 (a), se
La fuerza 𝑭
expresa en forma vectorial, mediante la relación (2.31), así:
⃗𝑭 = ⃗𝝀𝐴𝐷 𝐹 (1)
Figura 3.34
Siendo ⃗𝝀𝐴𝐷 = vector unitario en la dirección AD y F = magnitud de 𝑭
⃗ = 100N
6𝒋−8𝒌 6𝒋−8𝒌
⃗𝝀𝐴𝐷 = =
√62 + 82 10
Al sustituir valores en (1):
⃗ = 60𝑗 − 80𝑘[𝑁]
𝑭
José Manuel Arroyo Andrade UNISUCRE
32
De acuerdo a los resultados de la sección 3.20, una fuerza 𝑭 ⃗ que actúa en un
punto A es equivalente a la misma fuerza 𝑭⃗ aplicada en un punto B, diferente de
A, si se le adiciona en B un par de momento 𝑴 ⃗⃗⃗ = 𝒓 ⃗ , siendo 𝒓
⃗ 𝐵𝐴 𝒙𝑭 ⃗ 𝐵𝐴 el vector
⃗ , hasta A, punto inicial de la misma,
dirigido desde B, punto final de la fuerza 𝑭
como se muestra en la Figura 3.34 (a). O sea:
⃗ 𝐵𝐴 = 12𝒊[𝑚]
𝒓
𝒊 𝒋 𝒌
⃗𝑴
⃗⃗ = 𝒓 ⃗ = [ 12 0
⃗ 𝐵𝐴 𝒙𝑭 0 ] [𝑁𝑚] = 960𝒋 + 720𝒌 [𝑁𝑚]
0 60 −80
⃗⃗ y un par de momento 𝑴
En el punto B se tiene una fuerza 𝑹 ⃗⃗⃗ , como se aprecia en
la Figura 3.34 (b). Nótese que el momento 𝑴 ⃗⃗⃗ del par, por ser un vector libre,
como ya se ha visto, tiende a producir el mismo efecto de rotación
independientemente del punto donde se coloque, aunque por conveniencia se
ubica en el punto B, junto con la fuerza 𝑭⃗ y al conjunto se le denomina sistema
fuerza-par en B.
3.33 SISTEMA FUERZA PAR EQUIVALENTE DE VARIAS FUERZAS
⃗ 1, 𝑭
Si se tienen varias fuerzas 𝑭 ⃗ 2y𝑭
⃗ 3 aplicadas respectivamente en los puntos
A1, A2 y A3 de un cuerpo rígido, siendo 𝒓 ⃗ 1, 𝒓
⃗2y𝒓
⃗ 3 los vectores de posición
correspondientes, como se indica en la Figura 3.35 (a), se pueden convertir cada
una de ellas en un sistema fuerza par en un punto O, como se muestra en la
Figura 3.35 (b), para lo cual se obtienen las fuerzas ⃗𝑭1 , ⃗𝑭2 y ⃗𝑭3 , además de los
momentos respectivos, dados por:
⃗𝑴
⃗⃗ 1 = 𝒓 ⃗1
⃗ 1 𝒙𝑭 ⃗𝑴
⃗⃗ 2 = 𝒓 ⃗2
⃗ 2 𝒙𝑭 ⃗𝑴
⃗⃗ 3 = 𝒓 ⃗3
⃗ 3 𝒙𝑭
Al estar aplicadas las fuerzas en un mismo punto O, se pueden sumar para hallar
una resultante, así:
⃗⃗ = 𝑭
𝑹 ⃗ 1+𝑭
⃗ 2+𝑭
⃗3
Se suman también los momentos:
José Manuel Arroyo Andrade UNISUCRE
33
⃗𝑴
⃗⃗ 𝑅 = ⃗𝑴
⃗⃗ 1 + ⃗𝑴
⃗⃗ 2 + ⃗𝑴
⃗⃗ 3
Finalmente en el punto O se tiene un sistema equivalente fuerza-par dado por
un fuerza ⃗𝑹 ⃗ y un par de momento ⃗𝑴 ⃗⃗ 𝑅 , como se indica en la Figura 3.35 (c), el
cual produce el mismo efecto de rotación y de traslación que las fuerzas
⃗ 1, 𝑭
𝑭 ⃗ 2y𝑭
⃗ 3 , aplicadas en sus respectivos puntos.
Figura 3.35
Se debe tener en cuenta que mientras que los momentos ⃗𝑴 ⃗⃗ 1 , ⃗𝑴
⃗⃗ 2 y ⃗𝑴
⃗⃗ 3 , tomados
de forma individual, son perpendiculares a sus respectivas fuerzas ⃗𝑭1 , ⃗𝑭2 y ⃗𝑭3 ,
en general, el momento resultante ⃗𝑴
⃗⃗ 𝑅 no es perpendicular a la fuerza resultante
fuerza ⃗𝑹
⃗.
José Manuel Arroyo Andrade UNISUCRE
34
Después de que un sistema de fuerzas se ha reducido a un sistema equivalente
fuerza par, dado por una fuerza 𝑹 ⃗⃗ y un par de momento 𝑴⃗⃗⃗ 𝑅 , como se indica en
la Figura 3.35 (c), se puede convertir en un nuevo sistema equivalente fuerza
par aplicados en un punto O’, como se aprecia en la Figura 3.35 (d), dados por la
misma fuerza 𝑹⃗⃗ , la cual permanece igual y un par de momento 𝑴′ ⃗⃗⃗⃗⃗ 𝑅 así:
⃗⃗⃗⃗⃗ ⃗⃗⃗ 𝑅 + ⃗⃗⃗
𝑴′𝑅 = 𝑴 𝒓′𝒙𝑹⃗⃗ (3.24)
Siendo: ⃗⃗⃗
𝒓′ = 𝒓⃗ 𝑂′𝑂 = vector desde el punto O’, posición del nuevo sistema
equivalente fuerza par, hasta el punto O, como se muestra en la Figura 3.35 (c).
3.34 PROBLEMA EJEMPLO 3.11
Una varilla de sección cuadrada OABCD es sometida a dos fuerzas y dos pares
como se indica en la Figura 3.36. (a) Reducir a un sistema fuerza par
equivalente aplicado en el punto O. (b) Reducir a un sistema fuerza par
equivalente aplicado en el punto C. (c) Convertir el sistema fuerza par obtenido
en el punto O, en un nuevo sistema fuerza par en el punto C. Compare los
resultados.
Figura 3.36
Solución (a)
José Manuel Arroyo Andrade UNISUCRE
35
Se designan cada una de las fuerzas y los pares, así:
⃗ 1 = 𝑓𝑢𝑒𝑟𝑧𝑎 𝑑𝑒 100𝑁
𝑭 ⃗ 2 = 𝑓𝑢𝑒𝑟𝑧𝑎 𝑑𝑒 180𝑁
𝑭
⃗𝑴
⃗⃗ 1 = 𝑚𝑜𝑚𝑒𝑛𝑡𝑜 𝑑𝑒𝑙 𝑝𝑎𝑟 𝑑𝑒 ⃗𝑭1 ⃗𝑴
⃗⃗ 2 = 𝑚𝑜𝑚𝑒𝑛𝑡𝑜 𝑑𝑒𝑙 𝑝𝑎𝑟 𝑑𝑒 ⃗𝑭2
⃗𝑴
⃗⃗ 𝑝1 = 𝑚𝑜𝑚𝑒𝑛𝑡𝑜 𝑑𝑒𝑙 𝑝𝑎𝑟 𝑑𝑒 30𝑁 ⃗𝑴
⃗⃗ 𝑝2 = 𝑚𝑜𝑚𝑒𝑛𝑡𝑜 𝑑𝑒𝑙 𝑝𝑎𝑟 𝑑𝑒 20𝑁
Se trasladan las fuerzas 𝑭 ⃗ 1y𝑭⃗ 2 , para obtener en el punto O, las mismas dos
fuerzas, al adicionarle los respectivos momentos 𝑴 ⃗⃗⃗ 1 y 𝑴
⃗⃗⃗ 2 , como se muestra en
la Figura 3.37 (a), dados así:
3𝒊 − 4𝒋
⃗ 1 = ⃗𝝀1 𝐹1 = (
𝑭 ) (100𝑁) = 60𝒊 − 80𝒋 [𝑁]
√32 + 42
−4𝒊 + 7𝒋 + 4𝒌
⃗𝑭2 = ⃗𝝀2 𝐹2 = ( ) (180𝑁) = −80𝒊 + 140𝒋 + 80𝒌 [𝑁]
√42 + 72 + 42
𝒓 ⃗ 𝑂𝐷 = 3𝒊 − 2𝒋 + 5𝒌 [𝑚]
⃗1 =𝒓 ⃗2=𝒓
𝒓 ⃗ 𝑂𝐴 = 3𝒌 [𝑚]
𝒊 𝒋 𝒌
⃗⃗⃗ 1 = 𝒓
𝑴 ⃗1=[ 3
⃗ 1 𝒙𝑭 −2 5 ] [𝑁𝑚] = 400𝒊 + 300𝒋 − 120𝒌[𝑁𝑚]
60 −80 0
𝒊 𝒋 𝒌
⃗𝑴
⃗⃗ 2 = 𝒓 ⃗2=[ 0
⃗ 2 𝒙𝑭 0 3 ] [𝑁𝑚] = − 420𝒊 − 240𝒋 [𝑁𝑚]
−80 140 80
Se determinan los momentos de los pares de 30N y 20N, de acuerdo al
procedimiento visto en la sección 3.27 problema ejemplo 3.8, los cuales son
trasladados hacia al punto O, sin modificación alguna, por tratarse de ser
vectores libres.
José Manuel Arroyo Andrade UNISUCRE
36
𝒊 𝒋 𝒌
⃗⃗⃗ 𝑝1 = 𝒓
𝑴 ⃗ 𝑝1 = [ 0
⃗ 𝑝1 𝒙𝑭 0 −2] [𝑁𝑚] = − 60𝒋 [𝑁𝑚]
30 0 0
𝒊 𝒋 𝒌
⃗𝑴
⃗⃗ 𝑝2 = 𝒓 ⃗ 𝑝2 = [ 3 −2 0 ] [𝑁𝑚] = − 40𝒊 − 60𝒋 [𝑁𝑚]
⃗ 𝑝2 𝒙𝑭
0 0 20
Figura 3.37
Entonces, se suman las fuerzas para hallar una resultante, así:
⃗⃗ = 𝑭
𝑹 ⃗ 1+𝑭
⃗ 2 = −20𝒊 + 60𝒋 + 80𝒌 [𝑁]
Y se suman también los momentos para encontrar un par resultante:
⃗𝑴
⃗⃗ 𝑅 = ⃗𝑴
⃗⃗ 1 + ⃗𝑴
⃗⃗ 2 + ⃗𝑴
⃗⃗ 𝑝1 + ⃗𝑴
⃗⃗ 𝑝2 = −60𝒊 − 60𝒋 − 120𝒌 [𝑁𝑚]
En la Figura 3.37 (b) se muestra el resultado de la conversión, en donde se tiene
un sistema fuerza par equivalente, compuesto por una fuerza resultante 𝑹 ⃗⃗ y un
momento resultante 𝑴 ⃗⃗⃗ 𝑅 , actuando en el punto O.
Solución (b)
José Manuel Arroyo Andrade UNISUCRE
37
Siguiendo los pasos de acuerdo a la solución (a), se trasladan las fuerzas ⃗𝑭1 y ⃗𝑭2
hacia el punto C, para obtener las mismas fuerzas y los respectivos momentos
⃗⃗⃗⃗⃗ 1 y 𝑴′
𝑴′ ⃗⃗⃗⃗⃗ 2 , dados por:
⃗𝑭1 = 60𝒊 − 80𝒋 [𝑁] ⃗𝑭2 = −80𝒊 + 140𝒋 + 80𝒌 [𝑁]
⃗⃗⃗ ⃗ 𝐶𝐷 = −2𝒋 [𝑚]
𝒓′1 = 𝒓 ⃗⃗⃗ ⃗ 𝐶𝐴 = −3𝒊 − 2𝒌 [𝑚]
𝒓′2 = 𝒓
𝒊 𝒋 𝒌
⃗⃗⃗⃗⃗ ⃗⃗⃗ ⃗
𝑴′1 = 𝒓′1 𝒙𝑭1 = [ 0 −2 0 ] [𝑁𝑚] = 120𝒌 [𝑁𝑚]
60 −80 0
𝒊 𝒋 𝒌
⃗⃗⃗ ′2 = ⃗⃗⃗
𝑴 ⃗ 2 = [ −3
𝒓′2 𝒙𝑭 0 −2] [𝑁𝑚] = 280𝒊 + 400𝒋 − 420𝑘 [𝑁𝑚]
−80 140 80
Por último, se hallan la fuerza resultante 𝑹⃗⃗ y el momento resultante ⃗⃗⃗⃗⃗ 𝑴′𝑅
tomando los mismos momentos de los pares 𝑴⃗⃗⃗ 𝑝1 𝑦 𝑴
⃗⃗⃗ 𝑝2 , ya calculados, así:
⃗𝑹
⃗ = ⃗𝑭1 + ⃗𝑭2 = −20𝒊 + 60𝒋 + 80𝒌 [𝑁]
⃗⃗⃗⃗⃗
𝑴′𝑅 = ⃗⃗⃗⃗⃗
𝑴′1 + ⃗⃗⃗⃗⃗
𝑴′2 + ⃗𝑴
⃗⃗ 𝑝1 + ⃗𝑴
⃗⃗ 𝑝2 = 240𝒊 + 280𝒋 − 300𝒌 [𝑁𝑚]
En el punto C se tiene, la misma fuerza resultante ⃗𝑹
⃗ y el momento resultante
⃗⃗⃗⃗⃗
𝑴′𝑅 .
Solución (c)
Una vez se tiene un sistema fuerza par en un punto determinado O, se puede
convertir en un nuevo sistema fuerza par en otro punto C, teniendo en cuenta
que la fuerza resultante ⃗𝑹⃗ es siempre la misma, aunque el nuevo momento
resultante ⃗⃗⃗⃗⃗
𝑴′𝑅 se calcula de acuerdo a la relación (3.24), así:
⃗⃗⃗⃗⃗ ⃗⃗ 𝑅 + ⃗⃗⃗
𝑴′𝑅 = ⃗𝑴 𝒓′𝒙𝑹⃗⃗ (1)
⃗⃗⃗
𝒓′ = ⃗𝒓𝐶𝑂 = −3𝒊 − 5𝒌[𝑚] ⃗𝑹
⃗ = −20𝒊 + 60𝒋 + 80𝒌 [𝑁]
José Manuel Arroyo Andrade UNISUCRE
38
𝒊 𝒋 𝒌
⃗⃗⃗
𝒓′𝒙𝑹⃗⃗ = [ −3 0 −5] [𝑁𝑚] = 300𝒊 + 340𝒋 − 180𝒌[𝑁𝑚]
−20 60 80
⃗𝑴
⃗⃗ 𝑅 = ⃗𝑴
⃗⃗ 1 + ⃗𝑴
⃗⃗ 2 + ⃗𝑴
⃗⃗ 𝑝1 + ⃗𝑴
⃗⃗ 𝑝2 = −60𝒊 − 60𝒋 − 120𝒌 [𝑁𝑚]
Al sustituir valores en la ecuación (1):
⃗⃗⃗⃗⃗
𝑴′𝑅 = 240𝒊 + 280𝒋 − 300𝒌[𝑁𝑚]
El nuevo sistema fuerza par actuando en el punto C, está dado por la resultante
⃗ y un par de momento ⃗⃗⃗⃗⃗
⃗𝑹 𝑴′𝑅 . Se observa que los resultados obtenidos mediante
las soluciones (b) y (c) son iguales, como era de esperarse.
3.35 CONVERSIONES DE SISTEMAS EQUIVALENTES DE FUERZAS
Para facilitar su estudio, los sistemas de fuerzas son reducidos a sistemas
equivalentes simplificados y poder analizar de forma sencilla las condiciones de
cargas sobre un cuerpo rígido. Teniendo en cuenta las posibilidades de
transformar un sistema de fuerzas aplicado a un cuerpo rígido, en un sistema
equivalente abreviado, se pueden estudiar las siguientes formas de conversión:
1. Sistema de Fuerzas Coplanario, el cual se puede reducir a una fuerza
única equivalente.
2. Sistema de Fuerzas Paralelas, en el plano o en el espacio, el cual se puede
convertir también en una fuerza única equivalente.
3. Sistema de Fuerzas en el Espacio, el cual para ser reducido es necesario
convertirlo en una fuerza y un par que actúan en la misma dirección,
denominado torsor.
3.36 REDUCCIÓN DE UN SISTEMA DE FUERZAS COPLANARIO EN UNA FUERZA
ÚNICA EQUIVALENTE
Sean 𝑭⃗ 1, 𝑭
⃗ 2y𝑭
⃗ 3 un sistema de fuerzas en el plano XY y sean 𝒓⃗ 1, 𝒓
⃗2y𝒓
⃗ 3 los
correspondientes vectores de posición de los puntos de aplicación respectivos
A, B y C como se indica en la Figura 3.38 (a).
Al transformar el sistema de fuerzas en un sistema fuerza par en el punto O,
⃗⃗ en el
como se ilustra en la Figura 3.38 (b), se obtiene una fuerza resultante 𝑹
José Manuel Arroyo Andrade UNISUCRE
39
plano XY y un momento resultante ⃗𝑴 ⃗⃗ 𝑅 con componente solamente en el eje Z,
por lo tanto son respectivamente perpendiculares, expresados así:
⃗𝑹
⃗ = 𝑅𝑥 𝒊 + 𝑅𝑦 𝒋 ⃗𝑴
⃗⃗ 𝑅 = 𝑀𝑧 𝒌
El anterior sistema puede ser convertido en una sola fuerza equivalente ⃗𝑹 ⃗ , lo
cual se consigue al mover a ⃗𝑹 ⃗ de tal manera que su línea de acción corte al eje X
en el punto D, como se aprecia en la Figura 3.38 (c), siendo 𝒓⃗ = 𝑥𝒊, produciendo
el momento 𝑴′⃗⃗⃗⃗⃗ 𝑅 dado por:
𝒊 𝒋 𝒌
⃗⃗⃗⃗⃗ 𝑅 = 𝒓
𝑴′ ⃗⃗ = [ 𝑥
⃗ 𝒙𝑹 0 0 ] = 𝑥𝑅𝑦 𝒌
𝑅𝑥 𝑅𝑦 0
Figura 3.38
⃗⃗ 𝑅 y ⃗⃗⃗⃗⃗
Al igualar ⃗𝑴 𝑴′𝑅 : 𝑥𝑅𝑦 = 𝑀𝑧 𝑥 = 𝑀𝑧 /𝑅𝑦
Siendo: 𝑀𝑧 = magnitud del momento resultante ⃗𝑴
⃗⃗ 𝑅 y 𝑅𝑦 = componente en el
⃗⃗ .
eje Y, de la fuerza resultante 𝑹
3.37 PROBLEMA EJEMPLO 3.12
Para la armadura y cargas mostradas en la Figura 3.39 (a), encuentre: a) un
sistema fuerza-par equivalente en el punto A y b) una fuerza única equivalente y
la intersección de su línea de acción con el eje X.
José Manuel Arroyo Andrade UNISUCRE
40
Solución (a)
Se designan y se expresan en forma vectorial cada una de las fuerzas y los pares,
teniendo en cuenta que el lado positivo del eje Z sale del plano de la figura:
⃗𝑭1 = 𝑓𝑢𝑒𝑟𝑧𝑎 𝑑𝑒 100𝑁 = −100𝒋[𝑁] ⃗𝑭2 = 𝑓𝑢𝑒𝑟𝑧𝑎 𝑑𝑒 200𝑁 = 200𝒋[𝑁]
⃗ 3 = 𝑓𝑢𝑒𝑟𝑧𝑎 𝑑𝑒 500𝑁 = 500𝑐𝑜𝑠60°𝒊 − 500𝑠𝑒𝑛60°𝒋[𝑁] = 250𝒊 − 433𝒋[𝑁]
𝑭
⃗𝑴
⃗⃗ 𝑝 = 𝑚𝑜𝑚𝑒𝑛𝑡𝑜 𝑑𝑒𝑙 𝑝𝑎𝑟 𝑑𝑒 600𝑁𝑚 = 600𝒌[𝑁𝑚]
Figura 3.39
Se convierte cada fuerza en un sistema fuerza par equivalente en el punto A, el
cual consiste en colocar cada fuerza en dicho punto y adicionarle un par de
momento respectivo, de acuerdo a la Figura 3.39 (b), así:
⃗𝑴
⃗⃗ 1 = 𝒓 ⃗1
⃗ 1 𝒙𝑭 ⃗𝑴
⃗⃗ 2 = 𝒓 ⃗2
⃗ 2 𝒙𝑭 ⃗𝑴
⃗⃗ 3 = 𝒓 ⃗3
⃗ 3 𝒙𝑭
⃗1 =𝒓
𝒓 ⃗ 𝐴𝐹 = 5𝒊 + 2𝒋[𝑚] 𝒓
⃗2=𝒓
⃗ 𝐴𝐷 = 4𝒊[𝑚] 𝒓
⃗3=𝒓
⃗ 𝐴𝐸 = 3𝒊 + 2𝒋[𝑚]
⃗𝑴
⃗⃗ 1 = (5𝒊 + 2𝒋)𝒙(−100𝒋)[𝑁𝑚] = −500𝒌[𝑁𝑚]
⃗𝑴
⃗⃗ 2 = (4𝒊)𝒙(200𝒋)[𝑁𝑚] = 800𝒌[𝑁𝑚]
José Manuel Arroyo Andrade UNISUCRE
41
𝒊 𝒋 𝒌
⃗⃗⃗ 3 = 𝒓
𝑴 ⃗3=[ 3
⃗ 𝐴𝐸 𝒙𝑭 2 0 ] [𝑁𝑚] = −1799𝒌 [𝑁𝑚]
250 −433 0
El momento del par de 600Nm, por ser un vector libre, se traslada al punto A sin
modificación alguna, como se muestra en la Figura 3.39 (b).
Se determina en el punto A, una fuerza resultante ⃗𝑹⃗ y un momento resultante
⃗𝑴
⃗⃗ 𝑅 , denominado sistema fuerza par equivalente en el punto A, como se indica
en la Figura 3.40 (a), así:
⃗𝑹
⃗ = ⃗𝑭1 + ⃗𝑭2 + ⃗𝑭3 = −100𝒋 + 200𝒋 + 250𝒊 − 433𝒋[𝑁] = 250𝒊 − 333𝒋[𝑁]
⃗𝑴
⃗⃗ 𝑅 = ⃗𝑴
⃗⃗ 1 + ⃗𝑴
⃗⃗ 2 + ⃗𝑴
⃗⃗ 3 + ⃗𝑴
⃗⃗ 𝑝 = −500𝒌 + 800𝒌 − 1799𝒌 + 600𝒌[𝑁𝑚]
⃗⃗⃗ 𝑅 = −899𝒌[𝑁𝑚]
𝑴
Solución (b)
Convertir el sistema fuerza-par dado en el punto A, por la fuerza resultante ⃗𝑹 ⃗ y
el momento resultante ⃗𝑴 ⃗⃗ 𝑅 , como se indica en la Figura 3.40 (a), en una fuerza
única equivalente ⃗𝑹
⃗ , como se muestra en la Figura 3.40 (b).
Figura 3.40
Se traslada la fuerza 𝑹 ⃗⃗ de tal manera que se produzca un momento 𝑴 ⃗⃗⃗ ′𝑅 igual al
momento 𝑴 ⃗⃗⃗ 𝑅 , lo cual garantiza que los dos sistemas sean equivalentes.
José Manuel Arroyo Andrade UNISUCRE
42
⃗⃗⃗⃗⃗ 𝑅 = 𝒓
𝑴′ ⃗⃗
⃗ 𝒙𝑹 ⃗ = 𝑥𝒊[𝑚]
𝒓
𝒊 𝒋 𝒌
⃗⃗⃗⃗⃗ ⃗⃗ = [ 𝑥
⃗ 𝒙𝑹
𝑴′𝑅 = 𝒓 0 0 ] [𝑁𝑚] = −333𝑥𝒌 [𝑁𝑚]
250 −333 0
⃗⃗ 𝑅 = ⃗⃗⃗⃗⃗
⃗𝑴 𝑴′𝑅 − 899𝑘[𝑁𝑚] = −333𝑥𝑘[𝑁𝑚] 𝑥 = 899/333 = 2.69𝑚
Las dos situaciones mostradas en las Figuras 3.40 (a) y (b) son equivalentes.
3.38 CONVERSIÓN DE UN SISTEMA DE FUERZAS PARALELAS EN UNA FUERZA
ÚNICA EQUIVALENTE
Consideremos un sistema de fuerzas paralelas al eje Y, dados por ⃗𝑭1 , ⃗𝑭2 y ⃗𝑭3,
aplicadas respectivamente en los puntos de coordenadas (x1, z1), (x2, z2), (x3,
z3), como se muestra en la Figura 3.41 (a), por tanto los vectores de posición de
⃗ 1, 𝒓
los puntos de aplicación 𝒓 ⃗2y𝒓
⃗ 3 y las fuerzas correspondientes, se expresan
así:
⃗ 1 = 𝑥1 𝒊 + 𝑧1 𝒌
𝒓 ⃗ 1 = − 𝐹1 𝒋
𝑭
⃗ 2 = 𝑥2 𝒊 + 𝑧2 𝒌
𝒓 ⃗𝑭2 = − 𝐹2 𝒋
⃗ 3 = 𝑥3 𝒊 + 𝑧3 𝒌
𝒓 ⃗ 3 = − 𝐹3 𝒋
𝑭
Al trasladar las fuerzas al punto O se le adiciona a cada una su respectivo
momento, dados por:
⃗𝑴
⃗⃗ 1 = 𝒓 ⃗ 1 = 𝑧1 𝐹1 𝒊 − 𝑥1 𝐹1 𝒌
⃗ 1 𝒙𝑭
⃗𝑴
⃗⃗ 2 = ⃗𝒓2 𝒙𝑭
⃗ 2 = 𝑧2 𝐹2 𝒊 − 𝑥2 𝐹2 𝒌
⃗𝑴
⃗⃗ 3 = 𝒓 ⃗ 3 = 𝑧3 𝐹3 𝒊 − 𝑥3 𝐹3 𝒌
⃗ 3 𝒙𝑭
José Manuel Arroyo Andrade UNISUCRE
43
Figura 3.41
En el punto O se tiene una fuerza resultante ⃗𝑹⃗ y un momento resultante ⃗𝑴
⃗⃗ 𝑅
como se aprecia en la Figura 3.41 (b), expresados así:
⃗⃗ = 𝑭
𝑹 ⃗ 1+𝑭
⃗ 2+𝑭
⃗ 3 = −(𝐹1 + 𝐹2 + 𝐹3 )𝒋 = −𝑅𝒋
⃗𝑴
⃗⃗ 𝑅 = ⃗𝑴
⃗⃗ 1 + ⃗𝑴
⃗⃗ 2 + ⃗𝑴
⃗⃗ 3 = (𝑧1 𝐹1 + 𝑧2 𝐹2 + 𝑧3 𝐹3 )𝒊 − (𝑥1 𝐹1 + 𝑥𝐹2 + 𝑥3 𝐹3 )𝒌
Al expresar a ⃗𝑴
⃗⃗ 𝑅 en forma de componentes, como se indica en la Figura 3.40(c),
se tiene:
⃗𝑴
⃗⃗ 𝑅 = 𝑀𝑥 𝒊 − 𝑀𝑧 𝒌
𝑀𝑥 = (𝑧1 𝐹1 + 𝑧2 𝐹2 + 𝑧3 𝐹3 ) 𝑀𝑧 = (𝑥1 𝐹1 + 𝑥𝐹2 + 𝑥3 𝐹3 )
José Manuel Arroyo Andrade UNISUCRE
44
El vector del momento resultante 𝑴 ⃗⃗⃗ 𝑅 tiene sólo componentes en los ejes X y Z, o
sea, se encuentra contenida en el plano XZ, como se muestra en la Figuras 3.41
(c) y debido a que la fuerza resultante ⃗𝑹 ⃗ tiene únicamente componente en el eje
Y, entonces son perpendiculares entre sí, por lo tanto se pueden convertir en
una fuerza única equivalente, lo cual se consigue al trasladar a 𝑹 ⃗⃗ en forma
paralela como se indica en la Figura 3.41 (d), generándose el momento ⃗⃗⃗⃗⃗ 𝑴′𝑅 =
⃗
⃗
⃗ 𝒙𝑹, siendo 𝒓
𝒓 ⃗ = 𝑥𝒊 + 𝑧𝒌, así:
𝒊 𝒋 𝒌
⃗⃗⃗⃗⃗ ⃗⃗ = [ 𝑥
⃗ 𝒙𝑹
𝑴′𝑅 = 𝒓 0 𝑧 ] [𝑁𝑚] = 𝑧𝑅𝒊 − 𝑥𝑅𝒌 [𝑁𝑚]
0 −𝑅 0
Igualando 𝑴⃗⃗⃗ 𝑅 y ⃗⃗⃗⃗⃗
𝑴′𝑅 componente a componente se calculan los valores (x) y (z)
correspondientes a 𝒓 ⃗ , así: z = Mx/R y x = Mz/R, por lo que al reemplazar los
valores de Mx y Mz, se obtiene:
𝑥1 𝐹1 + 𝑥2 𝐹2 + 𝑥3 𝐹3 𝑧1 𝐹1 + 𝑧2 𝐹2 + 𝑧3 𝐹3
𝑥= 𝑧= (3.25)
𝐹1 + 𝐹2 + 𝐹3 𝐹1 + 𝐹2 + 𝐹3
Las relaciones (3.25) pueden ser utilizadas directamente para obtener, de forma
práctica y rápida, una solución escalar, como se verá en el siguiente ejemplo.
3.39 PROBLEMA EJEMPLO 3.13
Una placa de 12mx20m es sometida a cuatro fuerzas paralelas verticales como
se indica en la Figura 3.42. Hallar la fuerza equivalente y el punto de aplicación
correspondiente.
Solución Vectorial
Se expresa cada una de las fuerzas y sus correspondientes vectores de posición
de los puntos de aplicación con respecto al origen O en forma vectorial, así:
⃗ 1 = 0𝒊 + 4𝒌[𝑚]
𝒓 ⃗𝑭1 = −200𝒋[𝑁]
⃗ 2 = 8𝒊 + 10𝒌[𝑚]
𝒓 ⃗ 2 = − 220𝒋[𝑁]
𝑭
José Manuel Arroyo Andrade UNISUCRE
45
⃗ 3 = 12𝒊 + 0𝒌[𝑚]
𝒓 ⃗𝑭3 = −100𝒋[𝑁]
⃗ 4 = 5𝒊 − 5𝒌[𝑚]
𝒓 ⃗ 4 = −80𝒋[𝑁]
𝑭
Figura 3.42
Al efectuar la sumatoria de fuerzas para obtener la fuerza resultante, tenemos:
⃗𝑹
⃗ = −200𝒋[𝑁] − 220𝒋[𝑁] − 100𝒋[𝑁] − 80𝒋[𝑁] = −600𝒋[𝑁]
Los momentos de cada una de las fuerzas y el momento resultante en el punto O
están dados por:
⃗𝑴
⃗⃗ 1 = 𝒓 ⃗ 1 = (0𝒊 + 4𝒌)𝑥(−200𝒋)[𝑁𝑚] = 800𝒊[𝑁𝑚]
⃗ 1 𝒙𝑭
⃗𝑴
⃗⃗ 2 = ⃗𝒓2 𝒙𝑭
⃗ 2 = (8𝒊 + 10𝒌)𝑥(−220𝒋)[𝑁𝑚] = 2200𝒊 − 1760𝒌[𝑁𝑚]
⃗𝑴
⃗⃗ 3 = 𝒓 ⃗ 3 = (12𝒊 + 0𝒌)𝑥(−100𝒋)[𝑁𝑚] = −1200𝒌[𝑁𝑚]
⃗ 3 𝒙𝑭
⃗𝑴
⃗⃗ 4 = 𝒓 ⃗ 4 = (5𝒊 − 5𝒌)𝑥(−80𝒋)[𝑁𝑚] = −400𝒊 − 400𝒌[𝑁𝑚]
⃗ 4 𝒙𝑭
⃗⃗⃗ 𝑅 = 𝑴
𝑴 ⃗⃗⃗ 1 + 𝑴
⃗⃗⃗ 2 + 𝑴
⃗⃗⃗ 3 + 𝑴
⃗⃗⃗ 4 = 2600𝒊 − 3360𝒌[𝑁𝑚]
José Manuel Arroyo Andrade UNISUCRE
46
Tanto ⃗𝑹
⃗ como ⃗𝑴 ⃗⃗ 𝑅 son mostrados en la Figura 3.43 (a). Se designa el vector de
posición 𝒓⃗ = 𝑥𝒊 + 𝑧𝒌, correspondiente al momento ⃗⃗⃗⃗⃗𝑴′𝑅 de ⃗𝑹
⃗ una vez trasladado
a la posición (x, z) como se indica en la Figura 3.43 (b), por tanto:
𝒊 𝒋 𝒌
⃗𝑴
⃗⃗ ′𝑅 = 𝒓 ⃗
⃗
⃗ 𝒙𝑹 = [ 𝑥 0 𝑧 ] [𝑁𝑚] = 600𝑧𝒊 − 600𝑥𝒌 [𝑁𝑚]
0 −600 0
⃗⃗ 𝑅 y ⃗⃗⃗⃗⃗
Igualando ⃗𝑴 𝑴′𝑅 componente a componente hallamos los valores (x) y (z)
correspondientes 𝒓 ⃗ , así:
600z = 2600 z = 2600/600 = 4.33m
600x = 3360 x = 3360/600 = 5.6m
Figura 3.43
José Manuel Arroyo Andrade UNISUCRE
47
Solución Escalar
Se aplican las relaciones (3.25) dadas por:
𝑥1 𝐹1 + 𝑥2 𝐹2 + 𝑥3 𝐹3 + 𝑥4 𝐹4 𝑧1 𝐹1 + 𝑧2 𝐹2 + 𝑧3 𝐹3 + 𝑧4 𝐹4
𝑥= 𝑧=
𝐹1 + 𝐹2 + 𝐹3 + 𝐹4 𝐹1 + 𝐹2 + 𝐹3 + 𝐹4
𝐹1 = 200𝑁 𝑥1 = 0 𝑧1 = 4𝑚
𝐹2 = 220𝑁 𝑥2 = 8𝑚 𝑧2 = 10𝑚
𝐹3 = 100𝑁 𝑥3 = 12𝑚 𝑧3 = 0
𝐹4 = 80𝑁 𝑥4 = 5𝑚 𝑧4 = −5𝑚
(0)(200𝑁) + (8𝑚)(220𝑁) + (12𝑚)(100𝑁) + (5𝑚)(80𝑁)
𝑥= = 5.6𝑚
200𝑁 + 220𝑁 + 100𝑁 + 80𝑁
(4𝑚)(200𝑁) + (10𝑚)(220𝑁) + (0)(100𝑁) + (−5𝑚)(80𝑁)
𝑧= = 4.33𝑚
200𝑁 + 220𝑁 + 100𝑁 + 80𝑁
José Manuel Arroyo Andrade UNISUCRE
48
3.43 PROBLEMAS PROPUESTOS
PROBLEMA 1 Teniendo en cuenta los puntos A, B, C, D y E del sólido mostrado
en la figura, efectuar los siguientes productos vectoriales y hallar el área de cada
paralelogramo ⃗⃗⃗⃗⃗⃗ ⃗⃗⃗⃗⃗ , ⃗⃗⃗⃗⃗
𝑨𝑩𝒙𝑨𝑪 𝑨𝑪𝒙𝑨𝑫 ⃗⃗⃗⃗⃗⃗ , ⃗⃗⃗⃗⃗⃗
𝑩𝑨𝒙𝑩𝑫 ⃗⃗⃗⃗⃗⃗ y ⃗⃗⃗⃗⃗⃗
𝑩𝑪𝒙𝑩𝑬 ⃗⃗⃗⃗⃗⃗ .
PROBLEMA 2 Una fuerza ⃗𝑭 de magnitud 210 N pasa por los puntos A y B como
se indica en la figura. Hallar el momento de ⃗𝑭 con respecto al punto C: a)
utilizando el vector de posición 𝒓⃗ 𝐶𝐴 y b) tomando el vector de posición 𝒓
⃗ 𝐶𝐵 .
Compare los resultados.
PROBLEMA 3 Una fuerza 𝑭 ⃗ de magnitud 180N es aplicada en al punto A de una
viga empotrada, como se indica en la figura. Hallar el momento de la fuerza con
respecto al punto O.
José Manuel Arroyo Andrade UNISUCRE
49
PROBLEMA 4 Una tubería OABC, empotrada en el punto O, es sostenida al
⃗ de magnitud 210N en el punto C, mediante una cadena
aplicarle una fuerza 𝑭
⃗⃗⃗ 𝑜 de la fuerza 𝑭
CD, como se indica en la figura. Hallar (a) el momento 𝑴 ⃗ con
⃗ con respecto al eje que
respecto al punto O (b) el momento 𝑀𝐶𝐴 de la fuerza 𝑭
pasa por los puntos C y A.
PROBLEMAS 5 y 6 En relación con los cuerpos mostrados hallar el par
equivalente a los dos pares dados.
José Manuel Arroyo Andrade UNISUCRE
50
PROBLEMA 7 Teniendo en cuenta la viga AB y las cargas mostradas:
a) Convertir la fuerza de 100N en un sistema fuerza-par en el punto A.
b) Reemplazar el sistema fuerza-par dado en el punto A, por una sola fuerza
equivalente y hallar la distancia sobre el eje X que lo separa del punto A.
c) Reemplazar las dos fuerzas de 100N por una sola fuerza equivalente y
hallar la distancia sobre el eje X que lo separa del punto A.
d) Reemplazar las fuerzas de 100N y 120N por una sola fuerza equivalente
y encontrar la distancia sobre el eje X que lo separa del punto A.
PROBLEMA 8 De acuerdo a la viga y las cargas dadas:
a) Convertir la fuerza y el par dados por un sistema fuerza-par en el punto
A.
b) Reemplazar la fuerza y los dos pares dados por una sola fuerza
equivalente y hallar la distancia sobre el eje X que lo separa del punto A.
c) Reemplazar las dos fuerzas y el par dados por una sola fuerza
equivalente y hallar la distancia sobre el eje X que lo separa del punto A.
d) Reemplazar las dos fuerzas y el par dados por una sola fuerza
equivalente y encontrar la distancia sobre el eje X que lo separa del
punto A.
José Manuel Arroyo Andrade UNISUCRE
51
PROBLEMAS 9 y 10 El cuerpo mostrado está sometido a una fuerza y dos pares
como se indican. (a) Reducir a un sistema equivalente fuerza-par aplicado en el
punto A. (b) Reducir a un sistema fuerza-par aplicado en el punto B. (c)
Convertir el sistema fuerza par obtenido en el punto A en un nuevo sistema
fuerza par en el punto B. Compare los resultados.
PROBLEMAS 11, 12, 13 y 14 El cuerpo mostrado está sometido a dos fuerzas y
dos pares como se indican. (a) Reducir a un sistema equivalente fuerza-par
aplicado en el punto A. (b) Reducir a un sistema fuerza-par aplicado en el punto
José Manuel Arroyo Andrade UNISUCRE
52
B. (c) Convertir el sistema fuerza par obtenido en el punto A en un nuevo
sistema fuerza par en el punto B. Compare los resultados.
PROBLEMAS 15, 16, 17 y 18 Para la armadura y cargas mostradas encuentre: a)
un sistema fuerza-par equivalente en el punto O, b) una fuerza única
José Manuel Arroyo Andrade UNISUCRE
53
equivalente y la intersección de su línea de acción con el eje X. Dibuje los
respectivos diagramas.
PROBLEMAS 19 y 20 Encontrar la fuerza 𝑭 ⃗ y el valor x correspondiente a la
intersección de su línea de acción con el eje X, para que los dos sistemas sean
equivalentes.
José Manuel Arroyo Andrade UNISUCRE
54
PROBLEMA 21 Sobre una balsa de 15px12p son colocados tres paquetes A, B y C
de pesos respectivos 50 lb, 60 lb y 40 lb en las posiciones como lo indica la
figura. Hallar la magnitud y punto de aplicación del peso equivalente a los tres
pesos dados.
PROBLEMA 22 Sobre una balsa de 15px12p son colocados tres paquetes A, B y C
de pesos respectivos 50 lb, 60 lb y 40 lb en las posiciones como lo indica la
figura. Si se pone en la balsa un cuarto paquete D, de peso 70 lb, hallar su
posición para que el peso equivalente se encuentre localizado en el centro de la
balsa.
José Manuel Arroyo Andrade UNISUCRE
55
RESPUESTAS A LOS PROBLEMAS:
3.2 ⃗𝑴⃗⃗ 𝐶 = 1280𝒋 + 880𝒌 [𝑁𝑚]
3.3 ⃗𝑴⃗⃗ 𝑜 = 36𝒊 + 112𝒋 + 232𝒌 [𝑁𝑚]
3.4 ⃗𝑴⃗⃗ 𝑜 = 870𝒊 − 480𝒋 + 2400𝒌 [𝑁𝑚] 𝑀𝐶𝐴 = 2174.4 𝑁𝑚
3.5 ⃗𝑴⃗⃗ 𝑝 = − 420𝒊 − 480𝒋 [𝑁𝑚]
3.6 𝑴⃗⃗⃗ 𝑝 = − 360𝒊 + 20𝒋 + 450𝒌 [𝑁𝑚]
3.9 (a) ⃗𝑭 = −80𝒊 + 110𝒋 + 160𝒌 [𝑁] ⃗𝑴 ⃗⃗ 𝐴 = 1580𝒊 − 160𝒋 + 1450𝒌 [𝑁𝑚]
(b) ⃗𝑭 = −80𝒊 + 110𝒋 + 160𝒌 [𝑁] ⃗𝑴 ⃗⃗ 𝐵 = −180𝒊 + 320𝒋 + 240𝒌 [𝑁𝑚]
3.10 (a) ⃗𝑭 = −80𝒊 + 110𝒋 − 160𝒌 [𝑁] ⃗𝑴 ⃗⃗ 𝐴 = 180𝒊 + 960𝒋 + 1450𝒌 [𝑁𝑚]
(b) ⃗𝑭 = −80𝒊 + 110𝒋 − 160𝒌 [𝑁] ⃗𝑴⃗⃗ 𝐵 = −1580𝒊 − 2080𝒋 + 240𝒌 [𝑁𝑚]
3.12 (a) ⃗𝑹
⃗ = 140𝒊 + 80𝒋 + 20𝒌 [𝑙𝑏] ⃗𝑴⃗⃗ 𝐴 = −180.45𝒊 + 470𝒋 + 4.19𝒌 [𝑙𝑏𝑝]
(b) ⃗𝑹
⃗ = 140𝒊 + 80𝒋 + 20𝒌 [𝑙𝑏] ⃗𝑴
⃗⃗ 𝐵 = −1060.45𝒊 + 2370𝒋 − 1435.81𝒌 [𝑙𝑏𝑝]
3.13 (a) 𝑹 ⃗⃗ = −26.58𝒊 + 195.89𝒋 − 36.95𝒌 [𝑙𝑏]
⃗⃗⃗ 𝐴 = 1123.72𝒊 + 397.37𝒋 + 1298.39𝒌 [𝑙𝑏𝑝]
𝑴
(b) 𝑹 ⃗⃗ = −26.58𝒊 + 195.89𝒋 − 36.95𝒌 [𝑙𝑏]
⃗⃗⃗ 𝐵 = −2010.52𝒊 − 582.12𝒋 − 1639.96𝒌 [𝑙𝑏𝑝]
𝑴
3.15 ⃗𝑹⃗ = −100𝒊 − 167𝒋 [𝑁] ⃗𝑴 ⃗⃗ 𝑅 = −501𝒌 [𝑁𝑚] 𝑥 = 3𝑚
3.16 ⃗𝑹⃗ = −100𝒊 − 167𝒋 [𝑁] ⃗𝑴 ⃗⃗ 𝑅 = −501𝒌 [𝑁𝑚] 𝑥 = 3𝑚
3.17 𝑹⃗⃗ = 100𝒊 − 167𝒋 [𝑁] 𝑴
⃗⃗⃗ 𝑅 = −1002𝒌 [𝑁𝑚] 𝑥 = 6𝑚
3.18 𝑹⃗⃗ = −100𝒊 + 133𝒋 [𝑁] 𝑴 ⃗⃗⃗ 𝑅 = −532𝒌 [𝑁𝑚] 𝑥 = − 4𝑚
3.19 𝑭⃗ = 250𝒊 − 150𝒋 [𝑁] 𝑥 = 7𝑚
3.20 𝑭⃗ = 250𝒊 − 150𝒋 [𝑁] 𝑥 = 6.2𝑚
3.21 W= 150 lb x =7.73 p z=6.53 p
3.22 x = 7 p z = 4.85 p
José Manuel Arroyo Andrade UNISUCRE
Вам также может понравиться
- SISTEMAS EQUIVALENTES (v1)Документ56 страницSISTEMAS EQUIVALENTES (v1)YeniferОценок пока нет
- Sistemas equivalentes de fuerzas: momentos, producto vectorial y componentesДокумент49 страницSistemas equivalentes de fuerzas: momentos, producto vectorial y componentesOlga LozanoОценок пока нет
- ESTÁTICA - 3 PNG (Ve3)Документ47 страницESTÁTICA - 3 PNG (Ve3)edgar arroyoОценок пока нет
- Clase 3 Álgebra VectorialДокумент8 страницClase 3 Álgebra VectorialMar MoralesОценок пока нет
- Paralelismo, Proyección, EscalarДокумент25 страницParalelismo, Proyección, EscalarJosé Manuel T MarrufoОценок пока нет
- Segunda Guia de VectoresДокумент5 страницSegunda Guia de VectoreseverjamОценок пока нет
- Problemas de vectores, series y cálculo vectorialДокумент3 страницыProblemas de vectores, series y cálculo vectorialdiego cuervoОценок пока нет
- 1 Vectoresintroduccion 2Документ12 страниц1 Vectoresintroduccion 2Widmar AguilarОценок пока нет
- Operaciones Con Vectores en 3DДокумент6 страницOperaciones Con Vectores en 3DChristian MoralesОценок пока нет
- El Producto EscalarДокумент4 страницыEl Producto EscalarFleetОценок пока нет
- 7 - ProductoVectorial 2021-2Документ35 страниц7 - ProductoVectorial 2021-2Sandro Julián Panana EspinoОценок пока нет
- Ejemplos y Aclaración VectoresДокумент7 страницEjemplos y Aclaración VectoresKeviin EstradaОценок пока нет
- Semana 2.s1 VectoresДокумент24 страницыSemana 2.s1 VectoresALINA LIZET VENTURA CABEZAОценок пока нет
- Hoja de Trabajo y Guia de Estudio - Sistema VectorialДокумент10 страницHoja de Trabajo y Guia de Estudio - Sistema VectorialGUILLERMO ALEJANDRO CARO VEGAОценок пока нет
- Lectura 5 CMДокумент3 страницыLectura 5 CMViridiana HernandezОценок пока нет
- Clase 1 PDFДокумент6 страницClase 1 PDFFernando Palacios OrellanaОценок пока нет
- Producto VectorailДокумент37 страницProducto VectorailLeonidas Bustamante ChaconОценок пока нет
- Unidad III Vectores en Sistemas Coordenados.Документ25 страницUnidad III Vectores en Sistemas Coordenados.Jhony CerqueraОценок пока нет
- ## PW VectoresДокумент25 страниц## PW VectoresOdon Arestegui SierraОценок пока нет
- Clase 13Документ4 страницыClase 13Amareliz MedinaОценок пока нет
- Semana 02Документ19 страницSemana 02YESSENIA ANACELI FERNANDEZ REYESОценок пока нет
- 12-Vectores en El EspacioДокумент28 страниц12-Vectores en El EspacioCarlos RamírezОценок пока нет
- Expo MMCДокумент9 страницExpo MMCEdu VásquezОценок пока нет
- Aula 6Документ2 страницыAula 6Cristian SotoОценок пока нет
- Producto VectorialДокумент5 страницProducto VectorialRodrigo Gutierrez ChavezОценок пока нет
- Sesión 1Документ8 страницSesión 1Sara Daniela Garcia AparicioОценок пока нет
- IntroducciónДокумент12 страницIntroducciónMelii BustiilloОценок пока нет
- Guia 1 Mes 6 Matematicas Nivel - VI - 2023Документ4 страницыGuia 1 Mes 6 Matematicas Nivel - VI - 2023martinez23carlos.cmОценок пока нет
- Proyecciones de Un VectorДокумент23 страницыProyecciones de Un VectorKEVIN ANTONY QUISPE COTRINAОценок пока нет
- Semana - 12-CA1FIA - 2019 - 01Документ31 страницаSemana - 12-CA1FIA - 2019 - 01Gonzalo Ricardo Bendita VilcarromeroОценок пока нет
- Unidad Ii: VectoresДокумент37 страницUnidad Ii: VectoresJose SalazarОценок пока нет
- Consulta 1Документ6 страницConsulta 1Alejandro GamboyОценок пока нет
- CURSO DE FISICA I 2014 Durante El ParoДокумент12 страницCURSO DE FISICA I 2014 Durante El ParoDiseño Web Profesional & Sistemas De SeguridadОценок пока нет
- BM1 Ej23Документ10 страницBM1 Ej23Indhy GarciaОценок пока нет
- Semana 2.1 Hoja de TrabajoДокумент7 страницSemana 2.1 Hoja de TrabajoJairo AlexisОценок пока нет
- Producto vectorial y producto escalarДокумент12 страницProducto vectorial y producto escalarMaria RoblesОценок пока нет
- Taller VectoresДокумент4 страницыTaller VectoresStiward JiménezОценок пока нет
- Guía No. 2 - VECTORES - Capítulo 3 de SerwayДокумент7 страницGuía No. 2 - VECTORES - Capítulo 3 de SerwayNALLI LOPEZ BYRON STEVENОценок пока нет
- Lab 03 Equilibrio de FuerzasДокумент6 страницLab 03 Equilibrio de Fuerzasjherson obeso agredaОценок пока нет
- S2 - Prod Vect y CombLinealooДокумент21 страницаS2 - Prod Vect y CombLinealooAndrea Zapana CalderónОценок пока нет
- Ensayo Cálculo FinalДокумент90 страницEnsayo Cálculo FinalLuigyen MejiaОценок пока нет
- S04.s2 - MaterialДокумент16 страницS04.s2 - MaterialJOSE LEON RAMOSОценок пока нет
- Capitulo II (Vectores)Документ6 страницCapitulo II (Vectores)Nyr ZpxОценок пока нет
- Guía para Estudiar El Capítulo 3 de SerwayДокумент5 страницGuía para Estudiar El Capítulo 3 de SerwaySofíaОценок пока нет
- Sesión 02. Vectores en El Plano. Ecuación Vectorial de La Recta. Transformación de CoordenadasДокумент33 страницыSesión 02. Vectores en El Plano. Ecuación Vectorial de La Recta. Transformación de CoordenadasLuis GerardoОценок пока нет
- Libro FMB P1 Final BN-páginas-25-30 PDFДокумент6 страницLibro FMB P1 Final BN-páginas-25-30 PDFDiego ForeroОценок пока нет
- Ensayo 2 Vectores en 3DДокумент10 страницEnsayo 2 Vectores en 3DAndrea LascanoОценок пока нет
- VectoresДокумент7 страницVectoresSara DiSuОценок пока нет
- Tarea CV 7Документ7 страницTarea CV 7Gómez Rodríguez Juan CarlosОценок пока нет
- S04s2-Producto Vectoria. Triple Producto EscalarДокумент22 страницыS04s2-Producto Vectoria. Triple Producto EscalarMelba KaisenОценок пока нет
- Vectores: Representación, Suma y ProductosДокумент6 страницVectores: Representación, Suma y ProductosCristian CharcaОценок пока нет
- Unidad1 VectoresДокумент35 страницUnidad1 VectoresFrida Grandi LiceagaОценок пока нет
- EntregableДокумент5 страницEntregableDenissОценок пока нет
- Mat1102c Tema1-1Документ9 страницMat1102c Tema1-1Emilda GutiérrezVegaОценок пока нет
- Tarea 1 Vectores Matrices y Determinantes Ejercicio 2 y Ejercicio 3Документ4 страницыTarea 1 Vectores Matrices y Determinantes Ejercicio 2 y Ejercicio 3Eriika IpiiaОценок пока нет
- Mapa MentalДокумент1 страницаMapa MentalFidel AndresОценок пока нет
- Tipos de ManometrosДокумент4 страницыTipos de ManometrosFidel AndresОценок пока нет
- Subirrigacion Primera Tecnica Dominada Por El Ser HumanoДокумент1 страницаSubirrigacion Primera Tecnica Dominada Por El Ser HumanoFidel AndresОценок пока нет
- Proceso de GerminacionДокумент3 страницыProceso de GerminacionFidel AndresОценок пока нет
- Competencia y JuramentoДокумент1 страницаCompetencia y JuramentoFidel AndresОценок пока нет
- Presentación Plan de Asignatura Fisiología VegetalДокумент4 страницыPresentación Plan de Asignatura Fisiología VegetalFidel AndresОценок пока нет
- Tipos de ManometrosДокумент4 страницыTipos de ManometrosFidel AndresОценок пока нет
- Presentación Plan de Asignatura Fisiología VegetalДокумент4 страницыPresentación Plan de Asignatura Fisiología VegetalFidel AndresОценок пока нет
- Laboratorio 2 ImbibicionДокумент18 страницLaboratorio 2 ImbibicionEver Leonardo50% (2)
- Policia Polica de Noche y de DiaДокумент1 страницаPolicia Polica de Noche y de DiaFidel AndresОценок пока нет
- Formato de Cancelacion de CreditosДокумент1 страницаFormato de Cancelacion de CreditosMelanis Andrea Navarro GarayОценок пока нет
- Contexto TallerДокумент3 страницыContexto TallerFidel AndresОценок пока нет
- Taller ContextoДокумент2 страницыTaller ContextoFidel AndresОценок пока нет
- Tipos de ManometrosДокумент4 страницыTipos de ManometrosFidel AndresОценок пока нет
- Acción de tutela para garantizar resonancia magnética a menor con dolores de cabezaДокумент8 страницAcción de tutela para garantizar resonancia magnética a menor con dolores de cabezaFidel AndresОценок пока нет
- Ejercicios Fisica 2Документ4 страницыEjercicios Fisica 2Fidel AndresОценок пока нет
- Presentación Plan de Asignatura Fisiología VegetalДокумент4 страницыPresentación Plan de Asignatura Fisiología VegetalFidel AndresОценок пока нет
- Presentación Plan de Asignatura Fisiología VegetalДокумент4 страницыPresentación Plan de Asignatura Fisiología VegetalFidel AndresОценок пока нет
- ContextotallerДокумент1 страницаContextotallerFidel AndresОценок пока нет
- Problema 1 08a 07Документ2 страницыProblema 1 08a 07Fidel AndresОценок пока нет
- Documento Sin TítuloДокумент4 страницыDocumento Sin TítuloFidel AndresОценок пока нет
- SISTEMAS EQUIVALENTES (v2) PDFДокумент55 страницSISTEMAS EQUIVALENTES (v2) PDFFidel AndresОценок пока нет
- Estudio Hidrodinámico de Vertederos y Rápidas EscalonadasДокумент10 страницEstudio Hidrodinámico de Vertederos y Rápidas EscalonadasDeiber AlexeyОценок пока нет
- 02 Comportamiento Pozos FluyentesДокумент85 страниц02 Comportamiento Pozos FluyentesRuben Gallardo Hernandez100% (1)
- P3 (S) Física Ceprunsa Ii Fase 2024Документ5 страницP3 (S) Física Ceprunsa Ii Fase 2024EDUARDO BANDICOOTОценок пока нет
- C567-05a Determinación de Densidad de Concreto Estructural LivianoДокумент5 страницC567-05a Determinación de Densidad de Concreto Estructural LivianoAntu Isabel100% (1)
- TEMAS 7 y 8 Introduccion A La Termodinamica Ocw ActualДокумент21 страницаTEMAS 7 y 8 Introduccion A La Termodinamica Ocw ActualNelson HuangalОценок пока нет
- Cuestionario de La Unidad 2 de Fisica 1Документ3 страницыCuestionario de La Unidad 2 de Fisica 1anmely kellyОценок пока нет
- Marcos de Madera en Los TúnelesДокумент18 страницMarcos de Madera en Los TúnelesJuanPabloArangoRestrepoОценок пока нет
- Pendulo Balistico NoemiДокумент16 страницPendulo Balistico NoemiYess Flores Delgado100% (2)
- 1Документ14 страниц1chaito0% (1)
- Procesos Químicos-230622 - 173034Документ7 страницProcesos Químicos-230622 - 173034Areli MoraОценок пока нет
- Respaldo Parametros Sheart Thininng 2Документ16 страницRespaldo Parametros Sheart Thininng 2aapv2205Оценок пока нет
- TelurohmetroДокумент15 страницTelurohmetroLOURDES JANNETH LIMON ROMEROОценок пока нет
- FISICA Unido.Документ24 страницыFISICA Unido.geomaritamatamorosОценок пока нет
- Practica 1 3CM2 PDFДокумент6 страницPractica 1 3CM2 PDFNicolás MGОценок пока нет
- CFE Factura de Servicios BásicosДокумент2 страницыCFE Factura de Servicios BásicosHugo RodolfoОценок пока нет
- Grf-005-04ef-Ef421-R0-101017 Memoria de CalculoДокумент71 страницаGrf-005-04ef-Ef421-R0-101017 Memoria de CalculoJose Guillermo Vasquez LagosОценок пока нет
- Taller 6 Termodinámica - 2022Документ2 страницыTaller 6 Termodinámica - 2022William QuinchiaОценок пока нет
- Proyecto de Una Línea de TransmisiónДокумент30 страницProyecto de Una Línea de Transmisióndavid jesus perez sisoОценок пока нет
- CAÍDA LIBRE Fundamento TeóricoДокумент2 страницыCAÍDA LIBRE Fundamento TeóricoDaniela Macias Mitma100% (1)
- Coeficiente de resistencia fluidoДокумент10 страницCoeficiente de resistencia fluidoWilliamОценок пока нет
- CINEMATICA. Repaso FisicaДокумент7 страницCINEMATICA. Repaso FisicaAlvaro Andrés Salazar JaramilloОценок пока нет
- 10 - Fisica - Alieth Fresneda - AgostoДокумент5 страниц10 - Fisica - Alieth Fresneda - AgostoAngie BlancoОценок пока нет
- Manual Lab Fisica GeneralДокумент30 страницManual Lab Fisica GeneralJosefinaОценок пока нет
- Diagrama de Flujo - ASTM D1298 - Cintia Felix PDFДокумент1 страницаDiagrama de Flujo - ASTM D1298 - Cintia Felix PDFCintia FelixОценок пока нет
- Diseño captación alpina río ChallhuayacoДокумент6 страницDiseño captación alpina río ChallhuayacochatapowerОценок пока нет
- Electricidad y Magnetismo UNAMДокумент4 страницыElectricidad y Magnetismo UNAMFranyer GuillenОценок пока нет
- Manual Pistola de TiempoДокумент15 страницManual Pistola de Tiempowilliams ramirezОценок пока нет
- Fisica 3Документ20 страницFisica 3Jesus SiesquenОценок пока нет
- OscilacionesДокумент55 страницOscilacionesMauricio MuñizОценок пока нет
- Cbarajas 04 - Taller HumidificacionДокумент3 страницыCbarajas 04 - Taller HumidificacionJorge RiveraОценок пока нет