Вам также может понравиться
- S 1506 pcc1301 - PortДокумент10 страницS 1506 pcc1301 - PortAlberto AraripeОценок пока нет
- Implementando Um Conversor Monofásico->trifásico No Stm32f103c8 Programado No ArduinoОт EverandImplementando Um Conversor Monofásico->trifásico No Stm32f103c8 Programado No ArduinoОценок пока нет
- Manual Gerador Stamford 2Документ72 страницыManual Gerador Stamford 2Lucas Nize DoreaОценок пока нет
- Instalação e operação do controlador K30SLVДокумент48 страницInstalação e operação do controlador K30SLVRodrigo GeraОценок пока нет
- AGC 200 Operators Manual 4189340607 BR PDFДокумент20 страницAGC 200 Operators Manual 4189340607 BR PDFCaua Dias Dos SantosОценок пока нет
- Apostila Deif ParaleloДокумент8 страницApostila Deif ParaleloMarcos BrandãoОценок пока нет
- IL-NT AMF25 TreinamentoДокумент188 страницIL-NT AMF25 TreinamentoJVV ENGENHARIAОценок пока нет
- Sistema de supervisão CAДокумент80 страницSistema de supervisão CARicardo Nunes Pereira Junior100% (1)
- CGC 400 Data Sheet 4921240518 BRДокумент12 страницCGC 400 Data Sheet 4921240518 BRJosé FerreiraОценок пока нет
- Comissionamento de Entradas e Saídas Externas BináriasДокумент20 страницComissionamento de Entradas e Saídas Externas BináriasRicardo Nunes Pereira JuniorОценок пока нет
- K90Master Manual PDFДокумент20 страницK90Master Manual PDFRodrigoChavesОценок пока нет
- Manual Alternador - Gerador de EnergiaДокумент43 страницыManual Alternador - Gerador de EnergiaGustavo AmorasОценок пока нет
- K38L Versão1410 PDFДокумент20 страницK38L Versão1410 PDFHelder Dos SantosОценок пока нет
- Manual K30Документ48 страницManual K30jonathas macedo de britoОценок пока нет
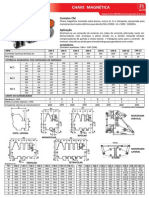
- Chave MagneticaДокумент1 страницаChave Magneticahudson100% (1)
- Lista de Alarmes e Parâmetros AGC4Документ205 страницLista de Alarmes e Parâmetros AGC4Ricardo Nunes Pereira Junior100% (1)
- Usca Manual StrazmaqДокумент29 страницUsca Manual StrazmaqwtkubotaОценок пока нет
- GC-1F Data Sheet 4921240327 BR - 2013.09.30Документ20 страницGC-1F Data Sheet 4921240327 BR - 2013.09.30delsonmmxОценок пока нет
- Treinamento DEIF AGC-200Документ8 страницTreinamento DEIF AGC-200Maqpower Engenharia100% (2)
- Atualização versão ST2060/80/90Документ14 страницAtualização versão ST2060/80/90Claudesson Nascimento RodriguesОценок пока нет
- Motor T4 ABBДокумент2 страницыMotor T4 ABBdesportista_luisОценок пока нет
- Configuração e uso do regulador de velocidade digital EDG5500Документ8 страницConfiguração e uso do regulador de velocidade digital EDG5500GilbertoОценок пока нет
- GEP200Документ4 страницыGEP200ricardobarreto10Оценок пока нет
- Controlador microprocessado para gerador AMFДокумент4 страницыControlador microprocessado para gerador AMFGustavo PereiraОценок пока нет
- Ultility Software Revisada1Документ69 страницUltility Software Revisada1romulooliveiraaraujo100% (1)
- Controlador de velocidade para motores diesel K35UGRRДокумент4 страницыControlador de velocidade para motores diesel K35UGRRRafael FernandoОценок пока нет
- Manual Top One 2.00 Rev. 04Документ40 страницManual Top One 2.00 Rev. 04Carlos Santos100% (1)
- Módulo Nexys 23KVA apresentação e configuraçãoДокумент7 страницMódulo Nexys 23KVA apresentação e configuraçãoJunior ReisОценок пока нет
- Manual Técnico para Grupo Gerador E Quadro de Comando Automático Usca E30 para Transferência IninterruptaДокумент12 страницManual Técnico para Grupo Gerador E Quadro de Comando Automático Usca E30 para Transferência IninterruptaRogério LovattoОценок пока нет
- Manual do Operador TD25SGE3Документ29 страницManual do Operador TD25SGE3FernandoPelozio100% (1)
- Documentação e manuais do controlador ML-2Документ105 страницDocumentação e manuais do controlador ML-2Efrain Almarazherrera100% (2)
- Me5 PDFДокумент91 страницаMe5 PDFRicardo Nunes Pereira JuniorОценок пока нет
- Agc 150 Installation Instructions 4189341185 BRДокумент26 страницAgc 150 Installation Instructions 4189341185 BRReuber Felipi Fernandes100% (1)
- Instruções de Funcionamento DS Series 7000Документ21 страницаInstruções de Funcionamento DS Series 7000silviopc67% (3)
- Pt26241a - Manual Gcp-2245lsxДокумент112 страницPt26241a - Manual Gcp-2245lsxRuben Marcos Alava Pico50% (2)
- CT Stemac 1Документ100 страницCT Stemac 1Jean Carlos FlorianoОценок пока нет
- Gerador Diesel 50Hz PT FPTДокумент2 страницыGerador Diesel 50Hz PT FPTDaniel MartinsОценок пока нет
- Apostila InteliGen NT BásicoДокумент27 страницApostila InteliGen NT BásicoSandro Muniz100% (2)
- Regulador eletrônico de velocidadeДокумент24 страницыRegulador eletrônico de velocidadeDarlan SilvaОценок пока нет
- Controlador de RPMДокумент9 страницControlador de RPMalexandreОценок пока нет
- Grupo Geradores - Sistemas de ControleДокумент20 страницGrupo Geradores - Sistemas de ControleGPrado0% (1)
- Especificações Técnicas Gerador 500kVA SCANIA 60Hz Rev03!02!09-2019Документ2 страницыEspecificações Técnicas Gerador 500kVA SCANIA 60Hz Rev03!02!09-2019Willy Delbone EliasОценок пока нет
- 500 USER Portuguese PDFДокумент155 страниц500 USER Portuguese PDFRicardo Nunes Pereira Junior100% (1)
- AGC 200 Manual do Operador: Leituras e FunçõesДокумент23 страницыAGC 200 Manual do Operador: Leituras e FunçõeslucaodoidaoОценок пока нет
- K30XL - Manual Rev00Документ47 страницK30XL - Manual Rev00MarioWencelewskiFilhoОценок пока нет
- Manual K30XL 300 Rev. 02Документ39 страницManual K30XL 300 Rev. 02Mário BassoliОценок пока нет
- Manual Consulta SDG514Документ6 страницManual Consulta SDG514Gian Gabriel dos Santos Homem100% (1)
- Manual Controlador Gerador NaganoДокумент40 страницManual Controlador Gerador NaganoThiago Rosa de MirandaОценок пока нет
- DKG 307 PortuguesДокумент54 страницыDKG 307 PortuguesFredKemil100% (2)
- Conversores Seriais Rev1Документ2 страницыConversores Seriais Rev1Adalberto Moura Dos Santos100% (1)
- PDF 1302 Portugues Codigo de Falhas DLДокумент9 страницPDF 1302 Portugues Codigo de Falhas DLDriverОценок пока нет
- Gtec - Port Chave de TransferenciaДокумент6 страницGtec - Port Chave de TransferenciaRenan CesarОценок пока нет
- Agc 150 Data Sheet 4921240597 BRДокумент31 страницаAgc 150 Data Sheet 4921240597 BRAnderson Silva de JesusОценок пока нет
- Treinamento IG-NT-GC - Nivel I - 2017Документ53 страницыTreinamento IG-NT-GC - Nivel I - 2017Vinícius de PaulaОценок пока нет
- Lamina Comercial Diesel 50Hz PT MWM - Serie TДокумент2 страницыLamina Comercial Diesel 50Hz PT MWM - Serie Tgiant360Оценок пока нет
- Motor Perkins Série 1000Документ64 страницыMotor Perkins Série 1000JB01091982100% (8)
- Grupo Motor Gerador Aula 02.2011.2 DiminuidoДокумент59 страницGrupo Motor Gerador Aula 02.2011.2 DiminuidoJaime Igor Viegas100% (1)
- Caderno de Atividades Pratica de Leitura e Producao de Textos 6o Ao 9o Ano PDFДокумент482 страницыCaderno de Atividades Pratica de Leitura e Producao de Textos 6o Ao 9o Ano PDFJaime Igor Viegas100% (2)
- 2014 8ano 3bim Gramatica PDFДокумент18 страниц2014 8ano 3bim Gramatica PDFJaime Igor ViegasОценок пока нет
- Gerenciamento de Projetos - Fabrica de ChuveirosДокумент18 страницGerenciamento de Projetos - Fabrica de ChuveirosJaime Igor ViegasОценок пока нет
- Segurança no trabalho: atitude e responsabilidadeДокумент1 страницаSegurança no trabalho: atitude e responsabilidadeJaime Igor ViegasОценок пока нет
- Manual Do Motor Scania d16Документ160 страницManual Do Motor Scania d16TucunareFish100% (5)
- SIST COMBUSTIVEL-geradoresДокумент48 страницSIST COMBUSTIVEL-geradoresJaime Igor Viegas100% (2)
- Motor 9L 5 cilindros ScaniaДокумент68 страницMotor 9L 5 cilindros ScaniaJaime Igor Viegas100% (3)
- NEWAplicação Da Arquitetura SOA em Sistemas Embarcados para IoTДокумент6 страницNEWAplicação Da Arquitetura SOA em Sistemas Embarcados para IoTJaime Igor ViegasОценок пока нет
- Motor 9L 5 cilindros ScaniaДокумент68 страницMotor 9L 5 cilindros ScaniaJaime Igor Viegas100% (3)
- Lista 1 - 1S2018Документ3 страницыLista 1 - 1S2018Jaime Igor ViegasОценок пока нет
- EMS SДокумент24 страницыEMS SJaime Igor Viegas100% (8)
- Banner Segurança PDFДокумент1 страницаBanner Segurança PDFJaime Igor ViegasОценок пока нет
- Conexões entre Matemática e Outros Campos do ConhecimentoДокумент4 страницыConexões entre Matemática e Outros Campos do ConhecimentoJaime Igor ViegasОценок пока нет
- Programa e TreinamentosДокумент12 страницPrograma e TreinamentosleokdОценок пока нет
- Gabarito Lista 2 2S2017Документ1 страницаGabarito Lista 2 2S2017Jaime Igor ViegasОценок пока нет
- Relatorio 2017-Controle de Acesso MicrocontroladoДокумент4 страницыRelatorio 2017-Controle de Acesso MicrocontroladoJaime Igor ViegasОценок пока нет
- Cinemática dos SólidosДокумент28 страницCinemática dos SólidosJaime Igor ViegasОценок пока нет
- UNIVERSIDADE SÃO FRANCISCO - Lista de Exercícios para N2 - Engenharia ElétricaДокумент2 страницыUNIVERSIDADE SÃO FRANCISCO - Lista de Exercícios para N2 - Engenharia ElétricaJaime Igor ViegasОценок пока нет
- Pibiti RF PDFДокумент23 страницыPibiti RF PDFJaime Igor ViegasОценок пока нет
- Aquisição e tratamento de dados IoTДокумент2 страницыAquisição e tratamento de dados IoTJaime Igor ViegasОценок пока нет
- Contrato de manutenção preventiva em grupos geradoresДокумент7 страницContrato de manutenção preventiva em grupos geradoresJaime Igor ViegasОценок пока нет
- 2015 GSA Atividade PlanilhadePlanejamento - CulturaДокумент4 страницы2015 GSA Atividade PlanilhadePlanejamento - CulturaJaime Igor ViegasОценок пока нет
- Exercícios Do Segundo Bimestre de 2016 de Mecânica Dos Sólidos UsfДокумент16 страницExercícios Do Segundo Bimestre de 2016 de Mecânica Dos Sólidos UsfJaime Igor ViegasОценок пока нет
- Metodo de Tres Momentos PDFДокумент2 страницыMetodo de Tres Momentos PDFBenjamin C. LauraОценок пока нет
- Diagrama Unifilar Sup Antonelli - Amparo - ParecerДокумент1 страницаDiagrama Unifilar Sup Antonelli - Amparo - ParecerJaime Igor ViegasОценок пока нет
- Manual DASN-Simei 2013 PDFДокумент14 страницManual DASN-Simei 2013 PDFjoadloОценок пока нет
- Peugeot 206 fusíveisДокумент2 страницыPeugeot 206 fusíveisJaime Igor Viegas83% (6)
- Sistema de aterramento industrialДокумент10 страницSistema de aterramento industrialPaulo Eduardo Sturmer100% (1)
- Transformadores de Potência, Distribuição e Subestações Móveis - EfacecДокумент1 страницаTransformadores de Potência, Distribuição e Subestações Móveis - EfacecSergioRamosОценок пока нет
- 4 - Conversor CC-CC - Buck - 2022-1Документ106 страниц4 - Conversor CC-CC - Buck - 2022-1Elétrica UFU RacingОценок пока нет
- Controladores de Temperatura: Modelos UWK48, LWK48, K48 e K49Документ52 страницыControladores de Temperatura: Modelos UWK48, LWK48, K48 e K49jonas hiperrollОценок пока нет
- Estudo Transformador Limitador MBIIДокумент7 страницEstudo Transformador Limitador MBIISergio PereiraОценок пока нет
- Circuito de entrada e controle de sobrecarga para canais A e BДокумент1 страницаCircuito de entrada e controle de sobrecarga para canais A e BGerson Watts eletrônica0% (1)
- Dispositivos - 6 FET Parte I v1 - 2Документ63 страницыDispositivos - 6 FET Parte I v1 - 2Humberto FelixxОценок пока нет
- NBR 5459 Manobra e Proteção de CircuitosДокумент16 страницNBR 5459 Manobra e Proteção de Circuitosjorge uiliam pereira da encarnaçãoОценок пока нет
- Uoc Tda9570h - N1Документ41 страницаUoc Tda9570h - N1api-3709639100% (3)
- Física FácilДокумент48 страницFísica FácilJulio Cesar CamargoОценок пока нет
- Weg MinicontatoresДокумент12 страницWeg MinicontatoresRicardo TarôcoОценок пока нет
- EE36 - Montagem de Postos de Transformação de CabinaДокумент19 страницEE36 - Montagem de Postos de Transformação de CabinaRuiMãodeFerroОценок пока нет
- PR Tica 4Документ4 страницыPR Tica 4Lucas MahiaОценок пока нет
- Dimensionamento de acionamento direto para motor 10CVДокумент20 страницDimensionamento de acionamento direto para motor 10CVJosinaldo Justino100% (1)
- ARTIGO Sobre Backflashovers - KUROKAWAДокумент6 страницARTIGO Sobre Backflashovers - KUROKAWAWesley KОценок пока нет
- Aula5 - Comandos ElétricosДокумент40 страницAula5 - Comandos Elétricosfisicanasser100% (5)
- TBJ IntroduçãoДокумент11 страницTBJ IntroduçãocristianoMSL100% (1)
- AULA 03 - Medição de Grandezas ElétricasДокумент20 страницAULA 03 - Medição de Grandezas ElétricasfabianovgaОценок пока нет
- D 1.2 - TemporizadoresДокумент55 страницD 1.2 - TemporizadoresMARIA GIOVANA LACORTE DA SILVAОценок пока нет
- Datasheet - BCS-11Документ1 страницаDatasheet - BCS-11Rodrigo CarmoОценок пока нет
- Relatorio de Fisica Carga e Descarga Do CapacitorДокумент6 страницRelatorio de Fisica Carga e Descarga Do CapacitorDouglas SantosОценок пока нет
- Manual Miconic LX: Guia Completo para Operação e ManutençãoДокумент18 страницManual Miconic LX: Guia Completo para Operação e ManutençãoLuciano KronhardtОценок пока нет
- Manual Capacitor PDFДокумент51 страницаManual Capacitor PDFElidia AndradeОценок пока нет
- Válvulas, Transistores e DiodosДокумент19 страницVálvulas, Transistores e DiodosLuis Felipe BelôОценок пока нет
- Apostila Materiais Elétricos Profa EdiДокумент43 страницыApostila Materiais Elétricos Profa Edianakelydias100% (1)
- ERG-014 - T25 - Avaliação N°2 - Junho - 2023Документ3 страницыERG-014 - T25 - Avaliação N°2 - Junho - 2023AgeuCrispimОценок пока нет
- Exercícios EletrônicaДокумент12 страницExercícios EletrônicaThaynara Renovato100% (1)
- Modelos de elementos do sistema elétrico de potênciaДокумент47 страницModelos de elementos do sistema elétrico de potênciaJoão Paulo LimaОценок пока нет
- Circuitos trifásicos conceitosДокумент46 страницCircuitos trifásicos conceitosReparação GeralОценок пока нет
- Difracão PDFДокумент138 страницDifracão PDFCarolina MaiiОценок пока нет