Вам также может понравиться
- Prática 8 Como Fazer Mapas ConceituaisДокумент1 страницаPrática 8 Como Fazer Mapas ConceituaisTassya Regina FontesОценок пока нет
- Aula 2 Titulação Ácido Base PDFДокумент63 страницыAula 2 Titulação Ácido Base PDFMarcelo Lima50% (2)
- Apostila Pré-CalculoДокумент44 страницыApostila Pré-Calculoenlil_de_avalonОценок пока нет
- Apostila Orgânica ExperimentalДокумент27 страницApostila Orgânica ExperimentalTassya Regina FontesОценок пока нет
- 1 Relatório PaquimetroДокумент18 страниц1 Relatório PaquimetroTassya Regina Fontes100% (1)
- 7 Relatório Conservação Da EnergiaДокумент16 страниц7 Relatório Conservação Da EnergiaTassya Regina FontesОценок пока нет
- Pendulo SimplesДокумент27 страницPendulo SimplesTassya Regina FontesОценок пока нет
- Fisio QuimicaДокумент34 страницыFisio QuimicaTassya Regina FontesОценок пока нет
- Adverbio e LocuçãoДокумент5 страницAdverbio e LocuçãoTassya Regina FontesОценок пока нет
- 82 Atividades de Matemc3a1tica 5c2ba Ano DescritoresДокумент48 страниц82 Atividades de Matemc3a1tica 5c2ba Ano DescritoresEliane MaiaОценок пока нет
- Atividade de Portugues Predicativo Do Sujeito 7º Ano RespostasДокумент1 страницаAtividade de Portugues Predicativo Do Sujeito 7º Ano RespostasTassya Regina Fontes63% (8)
- Quimica Lei Dos Gases ExerciciosДокумент21 страницаQuimica Lei Dos Gases ExerciciosJean Cesar BenassiОценок пока нет
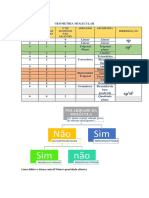
- Geometria e PolaridadeДокумент2 страницыGeometria e PolaridadeTassya Regina FontesОценок пока нет
- Atividade de Preposição e AdverbioДокумент3 страницыAtividade de Preposição e AdverbioTassya Regina Fontes100% (2)
- 01 Sintese Do Cloreto de Sódio - TassyaДокумент10 страниц01 Sintese Do Cloreto de Sódio - TassyaTassya Regina FontesОценок пока нет
- Sintese Do Cloreto de Sódio - TassyaДокумент11 страницSintese Do Cloreto de Sódio - TassyaTassya Regina FontesОценок пока нет
- 01 Sintese Do Cloreto de Sódio - TassyaДокумент10 страниц01 Sintese Do Cloreto de Sódio - TassyaTassya Regina FontesОценок пока нет
- 1 Relatório PaquimetroДокумент18 страниц1 Relatório PaquimetroTassya Regina Fontes100% (1)
- Formulas FísicaДокумент1 страницаFormulas FísicaTassya Regina FontesОценок пока нет
- Sintese Do Cloreto de Sódio - TassyaДокумент11 страницSintese Do Cloreto de Sódio - TassyaTassya Regina FontesОценок пока нет
- Fluxo de ReativosДокумент8 страницFluxo de ReativosTassya Regina FontesОценок пока нет
- Relatorio de Estagio Finalizado para Envio PDFДокумент36 страницRelatorio de Estagio Finalizado para Envio PDFTassya Regina FontesОценок пока нет
- Mulheres e o Poder - Eleitoral - Âmbito Jurídico PDFДокумент5 страницMulheres e o Poder - Eleitoral - Âmbito Jurídico PDFTassya Regina FontesОценок пока нет
- Imper A TivoДокумент4 страницыImper A TivoLucasDMОценок пока нет
- Blog CandidoДокумент8 страницBlog CandidoTassya Regina FontesОценок пока нет
- Apostila FCarga Gauss PDFДокумент22 страницыApostila FCarga Gauss PDFTassya Regina FontesОценок пока нет
- Direito Dos Idosos Nos HospitaisДокумент1 страницаDireito Dos Idosos Nos HospitaisTassya Regina FontesОценок пока нет
- CÍRCULOS DE CONTROLE DE QUALIDADE - CompactoДокумент15 страницCÍRCULOS DE CONTROLE DE QUALIDADE - CompactoClaudio StadelmannОценок пока нет
- Apostila Departamento PessoalДокумент48 страницApostila Departamento PessoalTatiane MatosОценок пока нет
- 2 Aula-NewДокумент29 страниц2 Aula-NewFrancisco CostaОценок пока нет
- Relatório - Desmontagem de Um Mci - Anderson Roseo PereiraДокумент14 страницRelatório - Desmontagem de Um Mci - Anderson Roseo PereiraAnderson RoseoОценок пока нет
- Calculo de Sapatas - Isolada - Divisa - Associada - Lista de AçoДокумент1 033 страницыCalculo de Sapatas - Isolada - Divisa - Associada - Lista de AçoKARINA MIRANZI NOGEUIRAОценок пока нет
- Helice VM 260 - Pesquisa GoogleДокумент1 страницаHelice VM 260 - Pesquisa Googlebrian mazottiОценок пока нет
- Equação de Swing - Aula 2Документ9 страницEquação de Swing - Aula 2Larissa Cavalheiro Cordeiro MotaОценок пока нет
- Arquitetura - AçoMadeiras - Aula 3 e 4Документ53 страницыArquitetura - AçoMadeiras - Aula 3 e 4Juciorle SoaresОценок пока нет
- Catalogo Normas Tecnicas PetrobrasДокумент20 страницCatalogo Normas Tecnicas PetrobrasRoberto AlessandroОценок пока нет
- Inst Calhas Igus PDFДокумент11 страницInst Calhas Igus PDFJoao Paiva SantosОценок пока нет
- Ciclo Diag - Volume 09 PDFДокумент104 страницыCiclo Diag - Volume 09 PDFgabrielzinho43100% (4)
- 4 Lista de Exercícios Fenomenos de TransporteДокумент3 страницы4 Lista de Exercícios Fenomenos de TransporteFelipe CalixtoОценок пока нет
- Rexroth - A10vso Série 31Документ40 страницRexroth - A10vso Série 31Níkolas Borges100% (1)
- 12 - Vigas MistasДокумент2 страницы12 - Vigas MistasLauro SandroОценок пока нет
- Capitulo 3.1. Propriedades Mecanicas Dos MateriaisДокумент9 страницCapitulo 3.1. Propriedades Mecanicas Dos MateriaisGabriel CorreiaОценок пока нет
- Principio Da TransmissibilidadeДокумент39 страницPrincipio Da TransmissibilidadetonydenavalОценок пока нет
- 0100058-Catalogo de Pecas EGU Rev46Документ62 страницы0100058-Catalogo de Pecas EGU Rev46kaiquemello100% (1)
- P&id 1Документ1 страницаP&id 1Olycord VОценок пока нет
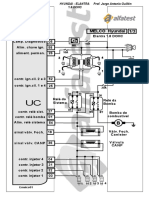
- Hyundai - Elantra 1.6 Dohc - JsalemanДокумент3 страницыHyundai - Elantra 1.6 Dohc - JsalemanLeonardo Molina100% (1)
- Torquímetros - GEDOREДокумент48 страницTorquímetros - GEDORELeandro Nobrega BiedmaОценок пока нет
- Aula 1 - Introdução Ao Concreto Armado Mod UniДокумент41 страницаAula 1 - Introdução Ao Concreto Armado Mod UniJoyce RosaОценок пока нет
- 2009 01 281233175593SRP3040 01Документ8 страниц2009 01 281233175593SRP3040 01Talita MayОценок пока нет
- Sangrar o Sistema de Freio Após Trocar As Pastilhas Pode Ser Difícil em Alguns Sistemas de Freio ABSДокумент2 страницыSangrar o Sistema de Freio Após Trocar As Pastilhas Pode Ser Difícil em Alguns Sistemas de Freio ABSasabrancoОценок пока нет
- Colisoes Gps Prof Questao BKPДокумент15 страницColisoes Gps Prof Questao BKPRicardoAmaralОценок пока нет
- Capitulo 6 IncroperaДокумент60 страницCapitulo 6 IncroperaRenanОценок пока нет
- Relatório de Fisico-Química Experimental I - Determinação Da Capacidade Calorífica de Um SólidoДокумент3 страницыRelatório de Fisico-Química Experimental I - Determinação Da Capacidade Calorífica de Um SólidoThiago LopesОценок пока нет
- Ava Unip - Termodinâmica Aplicada - Questionário Unidade IДокумент4 страницыAva Unip - Termodinâmica Aplicada - Questionário Unidade IEliseu ManoelОценок пока нет
- Aula 05 - Fundamentos Da Análise Estrutural (ARQ UFT)Документ19 страницAula 05 - Fundamentos Da Análise Estrutural (ARQ UFT)Gabriel Luan Paixão MotaОценок пока нет
- Tabela JNGДокумент95 страницTabela JNGCarloSilva0% (1)
- Accoes Sismicas Sobre Estruturas de SuporteДокумент8 страницAccoes Sismicas Sobre Estruturas de SuporteJuventino Federico CumbaneОценок пока нет
- T6Документ8 страницT6Vitor Joel ChavesОценок пока нет