Вам также может понравиться
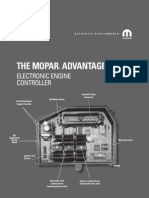
- Mopar Electric and Electronic Engine Controller Troubleshooting and OEM Parts ListДокумент56 страницMopar Electric and Electronic Engine Controller Troubleshooting and OEM Parts ListMiguel Angel Saiz67% (15)
- Can BusДокумент34 страницыCan Bushneto1975100% (4)
- 7FBEF-NMF 3 BANH Doi Cu PDFДокумент185 страниц7FBEF-NMF 3 BANH Doi Cu PDFDinh Thuong Cao100% (3)
- Diamond Logic Sistema ElectricoДокумент22 страницыDiamond Logic Sistema ElectricoFranciscoОценок пока нет
- IV Dam Outlet Work1Документ33 страницыIV Dam Outlet Work1hailish100% (1)
- ATS-Automatic Transfer Switch & Rectifier1Документ300 страницATS-Automatic Transfer Switch & Rectifier1engrvinzzОценок пока нет
- VW Touran SSP - 307 - d1 Can BusДокумент23 страницыVW Touran SSP - 307 - d1 Can Bus高立璋Оценок пока нет
- Plane and Solid Geometry Module 4Документ11 страницPlane and Solid Geometry Module 4Rose Marie Grimarin Fajutrao100% (1)
- SSP 307 Touran Electrical SystemДокумент60 страницSSP 307 Touran Electrical SystemMohamed BOUTEROUОценок пока нет
- Power System ModelingДокумент27 страницPower System ModelingFrancisco AndradeОценок пока нет
- 671 - BP Well Control Tool Kit 2002Документ20 страниц671 - BP Well Control Tool Kit 2002Uok Ritchie100% (1)
- Eric Hodel - Service Training InstructorДокумент50 страницEric Hodel - Service Training Instructorabduallah muhammadОценок пока нет
- Gen Control Paralleling SystemДокумент4 страницыGen Control Paralleling SystemSunny KumarОценок пока нет
- Wa Btec Locomotive Product CatalogДокумент68 страницWa Btec Locomotive Product Catalogfernanguedes2071100% (1)
- MagPi70 PDFДокумент100 страницMagPi70 PDFDaniel TuarezОценок пока нет
- Intelligent MCCДокумент35 страницIntelligent MCCdizzC001Оценок пока нет
- Diagnosis and Testing: Four Wheel Drive (4WD) Systems - Electronic ShiftДокумент38 страницDiagnosis and Testing: Four Wheel Drive (4WD) Systems - Electronic ShiftLojan Coronel José Humberto100% (1)
- DCS Application in Thermal Power PlantДокумент30 страницDCS Application in Thermal Power Plantanjumadhavan50% (2)
- Pandaros Workshopman-03 PDFДокумент33 страницыPandaros Workshopman-03 PDFRodrigo Santibañez100% (2)
- AMC 528 V8: User'S Manual And Technical Specification GSM 89864.4000МЕДокумент23 страницыAMC 528 V8: User'S Manual And Technical Specification GSM 89864.4000МЕAbenether Bekele100% (1)
- Theory of Operation: GeneralДокумент38 страницTheory of Operation: GeneralChristian Bedoya100% (1)
- Eng Cont AuxiliaryДокумент35 страницEng Cont AuxiliaryagvassОценок пока нет
- Unit Rig Mt4400 Ac Off-Highway Truck: Global Manpower DevelopmentДокумент19 страницUnit Rig Mt4400 Ac Off-Highway Truck: Global Manpower DevelopmentVictor Rodrigo Cortes YañezОценок пока нет
- ZDR Ksmstep05 Fms GB PDFДокумент61 страницаZDR Ksmstep05 Fms GB PDFMuhamedomar Jojo Jojo100% (1)
- (FreeCourseWeb - Com) 1493997599Документ386 страниц(FreeCourseWeb - Com) 1493997599MuruganandamGanesanОценок пока нет
- Robot Mechanisms and Mechanical Devices IllustratedОт EverandRobot Mechanisms and Mechanical Devices IllustratedРейтинг: 4 из 5 звезд4/5 (1)
- EagleBurgmann - API682 4th Facts, Innovations, SolutionsДокумент26 страницEagleBurgmann - API682 4th Facts, Innovations, SolutionsTasawwur Tahir100% (1)
- Tab005 - 3W - AC - MIT - Control System PDFДокумент72 страницыTab005 - 3W - AC - MIT - Control System PDFMohammed Al-hewaimel100% (1)
- BS en 00480-2-2006Документ14 страницBS en 00480-2-2006Shan Sandaruwan Abeywardene100% (1)
- Gsf-742 2 14 - Apm802 CatalogДокумент12 страницGsf-742 2 14 - Apm802 CatalogRavaelОценок пока нет
- LocoДокумент28 страницLocosuvratОценок пока нет
- User Manual For Speed Control of BLDC Motor Using DspicДокумент12 страницUser Manual For Speed Control of BLDC Motor Using DspicTrung TrựcОценок пока нет
- Motor Control and Drive Design SolutionsДокумент20 страницMotor Control and Drive Design SolutionsTa Huy CuongОценок пока нет
- RateKing Plus ManualДокумент68 страницRateKing Plus ManualCristian Castro - Ingeniería Full MaquinariasОценок пока нет
- Eet 4217 Lab1Документ6 страницEet 4217 Lab1Dilrangi HerathОценок пока нет
- 17 P& ID Format Electrical FundamentalsДокумент9 страниц17 P& ID Format Electrical FundamentalsAgbim MartinsОценок пока нет
- Data Line - BCM Control SchematicsДокумент24 страницыData Line - BCM Control Schematicsdldever01Оценок пока нет
- Technical Spec ZJ40BDДокумент63 страницыTechnical Spec ZJ40BDAl Farr100% (1)
- DTC C056D: Electronic Control Unit Hardware (Power Steering Control Module)Документ3 страницыDTC C056D: Electronic Control Unit Hardware (Power Steering Control Module)Nilciano VenturaОценок пока нет
- MCP AsДокумент10 страницMCP Asகோவி கோபால் ஆர்ட்ஸ்Оценок пока нет
- Cea7 enДокумент107 страницCea7 enMarek KoniarekОценок пока нет
- RA40 TransmissionДокумент33 страницыRA40 TransmissionRudi BilahОценок пока нет
- ACnetworksДокумент46 страницACnetworksVasudevan KunjithapathamОценок пока нет
- GCCP 1.3 - Control PanelДокумент1 страницаGCCP 1.3 - Control PanelHamza RouachedОценок пока нет
- PSIM Catalog PDFДокумент8 страницPSIM Catalog PDFkarthikp207Оценок пока нет
- UPS & InvertersДокумент56 страницUPS & InvertersMustafa SobhyОценок пока нет
- Readme ETopДокумент133 страницыReadme ETopSeriОценок пока нет
- SIMSEN Leaflet 14 Detailed PDFДокумент34 страницыSIMSEN Leaflet 14 Detailed PDFSuresh CОценок пока нет
- Instruction Manual Professional: Digital Control Unit Cem7Документ98 страницInstruction Manual Professional: Digital Control Unit Cem7sonnguyen273100% (1)
- Manual CEA7 MB - enДокумент97 страницManual CEA7 MB - enHanache MadaniОценок пока нет
- PowerHour - Hassan R Obeid PDF 2019-Jan-23Документ38 страницPowerHour - Hassan R Obeid PDF 2019-Jan-23Trường Bửu TrầnОценок пока нет
- PLC Training LiteratureДокумент45 страницPLC Training Literaturealex2gustavo2cuevas2Оценок пока нет
- E. Gasturbine RetrofitДокумент46 страницE. Gasturbine RetrofitMuhammadAsimОценок пока нет
- Automated Aquarium FeederДокумент11 страницAutomated Aquarium FeederMenaka MadusankaОценок пока нет
- Stepper Motors Step Up For Machine Automation: DON PHAM, Product Manager, IDECДокумент4 страницыStepper Motors Step Up For Machine Automation: DON PHAM, Product Manager, IDECSolikinSolehОценок пока нет
- Encp 7.3 Technical SpecsheetДокумент2 страницыEncp 7.3 Technical SpecsheetEng.Mohab MarzoukОценок пока нет
- Conveyer Brake SystemsДокумент4 страницыConveyer Brake SystemsTran DucОценок пока нет
- Backmann 36-558Документ2 страницыBackmann 36-558AntonioОценок пока нет
- Winpower Standby Troubleshooting GuideДокумент4 страницыWinpower Standby Troubleshooting GuideosanebiОценок пока нет
- Charging System - TestДокумент5 страницCharging System - TestPromesa De IsraelОценок пока нет
- Electrical DistributionДокумент52 страницыElectrical DistributionJuan JoseОценок пока нет
- 38690515Документ34 страницы38690515Philip TadrousОценок пока нет
- Diagnostic Trouble Codes: Troubleshooting The Cat Grade Control System SensorsДокумент12 страницDiagnostic Trouble Codes: Troubleshooting The Cat Grade Control System SensorsMarvin Melendez VanegasОценок пока нет
- Microtapper ManualДокумент49 страницMicrotapper ManualDeb SushitОценок пока нет
- Investment Model QuestionsДокумент12 страницInvestment Model Questionssamuel debebe0% (1)
- User Manual of Egov 11.0 Implementation of It Solution For RVNL D3799 Document Version / DetailsДокумент64 страницыUser Manual of Egov 11.0 Implementation of It Solution For RVNL D3799 Document Version / DetailsRVNLPKG6B VBL-GTLMОценок пока нет
- Allen-Bradley RSLogix 500 PDFДокумент6 страницAllen-Bradley RSLogix 500 PDFGanda PutraОценок пока нет
- Evaluasi Pengelolaan Sampah Di Kawasan Pantai Kabupaten Bantul, D. I. YogyakartaДокумент14 страницEvaluasi Pengelolaan Sampah Di Kawasan Pantai Kabupaten Bantul, D. I. YogyakartaRavyola AzzahraОценок пока нет
- JAGUAR E-TYPE: Assembly Instructions 1: View of The Engine View of The CockpitДокумент17 страницJAGUAR E-TYPE: Assembly Instructions 1: View of The Engine View of The Cockpitfranciss87Оценок пока нет
- GTB-BOL VetrificadoДокумент19 страницGTB-BOL VetrificadoelduenoОценок пока нет
- Alcatel 4029 EngДокумент31 страницаAlcatel 4029 Engafsanto2000Оценок пока нет
- Certificate of Analysis: Sulfate IC CRM - 1000 MG/LДокумент2 страницыCertificate of Analysis: Sulfate IC CRM - 1000 MG/LasanalyticalОценок пока нет
- Transportation ModelДокумент20 страницTransportation ModelRaj UpadhyayОценок пока нет
- Practical Exercise 2 - SolutionДокумент5 страницPractical Exercise 2 - SolutionmidoriОценок пока нет
- SM 89Документ36 страницSM 89Camilo RamosОценок пока нет
- AN17825AДокумент8 страницAN17825AJose M PeresОценок пока нет
- Competition Systems IGN1A Inductive Smart Coil - IGN1AДокумент2 страницыCompetition Systems IGN1A Inductive Smart Coil - IGN1AJoão Lucas ZaionsОценок пока нет
- 02 Sub-Surface Exploration 01Документ24 страницы02 Sub-Surface Exploration 01kabir AhmedОценок пока нет
- Mds Ti-Alloy Ta15 0720 enДокумент3 страницыMds Ti-Alloy Ta15 0720 enshahin_723Оценок пока нет
- Air Pollutants Transport ModelsДокумент12 страницAir Pollutants Transport ModelsRahul DandautiyaОценок пока нет
- Tefnol 1Документ11 страницTefnol 1Moustapha Salem MansourОценок пока нет
- Fmaths 3RD Term YR11 PlanДокумент28 страницFmaths 3RD Term YR11 Planadegunloye temitopeОценок пока нет
- Roasting Matte To Nickel Oxide and MetalДокумент7 страницRoasting Matte To Nickel Oxide and MetalDavid SanchezОценок пока нет
- Pole Placement by State Feedback in DC Motor by MatlabДокумент13 страницPole Placement by State Feedback in DC Motor by MatlabJason JonesОценок пока нет
- Immediate Settlement Analysis Using Finite Element Analysis Models of Fb-MultipierДокумент22 страницыImmediate Settlement Analysis Using Finite Element Analysis Models of Fb-MultipierRaaf RifandiОценок пока нет
- The Natureofthe ElectronДокумент18 страницThe Natureofthe ElectronSidhant KumarОценок пока нет
- Conectar A BD en SeleniumДокумент4 страницыConectar A BD en SeleniumCristhian Andrés GonzálezОценок пока нет