Вам также может понравиться
- CIM LAB ManualДокумент58 страницCIM LAB ManualBruce ColonОценок пока нет
- Jm201 - CNC MillingДокумент24 страницыJm201 - CNC MillingMuhd Zulhusni Ag Jaludin100% (1)
- Unit - 8: CNC ProgrammingДокумент21 страницаUnit - 8: CNC ProgrammingVarshaОценок пока нет
- Unit V CNC ProgrammingДокумент39 страницUnit V CNC ProgrammingOmkar NavaleОценок пока нет
- Ch-11 NC CNC DNC FMS Automation and RoboticsДокумент143 страницыCh-11 NC CNC DNC FMS Automation and RoboticsshafiqОценок пока нет
- Typical CNC Machining Centre: Horizontal Axis Milling Vertical Axis MillingДокумент82 страницыTypical CNC Machining Centre: Horizontal Axis Milling Vertical Axis MillingAbdul RehmanОценок пока нет
- STM Ust Lecture4 - 0Документ28 страницSTM Ust Lecture4 - 0Choukoura AldfeerОценок пока нет
- ASSIGNMENT 1 Cad PDFДокумент8 страницASSIGNMENT 1 Cad PDFSasank SaiОценок пока нет
- CADCAM Intro1Документ10 страницCADCAM Intro1Yousef AshryОценок пока нет
- Lecture Cad CamДокумент84 страницыLecture Cad Camismail_69Оценок пока нет
- Me 473 - Unit 4 - 1Документ70 страницMe 473 - Unit 4 - 1Ama Serwaa YeboahОценок пока нет
- 9.2 Part Programming For NC SystemsДокумент6 страниц9.2 Part Programming For NC SystemsWeween IbrahimОценок пока нет
- Computer Numerical Control Machine: By-Er - Ved PrakashДокумент28 страницComputer Numerical Control Machine: By-Er - Ved Prakashyogesh borseОценок пока нет
- Unit - III CNC Part ProgrammingДокумент39 страницUnit - III CNC Part ProgrammingNarayana PerumalОценок пока нет
- Chapter 6Документ56 страницChapter 6gashawletaОценок пока нет
- Yashwant InternshipДокумент17 страницYashwant InternshipGoku RocksОценок пока нет
- CNC Work TheoryДокумент16 страницCNC Work TheoryMeet technicalsОценок пока нет
- CNC Programming WRKB Lathe Sample LockedДокумент51 страницаCNC Programming WRKB Lathe Sample Lockedkree_bigdaddy100% (1)
- CHAPTER 8manual Part ProgrammingДокумент111 страницCHAPTER 8manual Part ProgrammingHrishikesh deshpandeОценок пока нет
- CNC Lathe2Документ41 страницаCNC Lathe2Ruby SmithОценок пока нет
- CNC Part ProgrammingДокумент53 страницыCNC Part ProgrammingmsshahenterОценок пока нет
- CNC Part ProgrammingДокумент40 страницCNC Part ProgrammingmsshahenterОценок пока нет
- CNC ProgrammingДокумент22 страницыCNC ProgrammingMani KandanОценок пока нет
- CNC TechДокумент20 страницCNC TechBharath KumarОценок пока нет
- 08 CNC and GcodeДокумент76 страниц08 CNC and Gcodeipasrl.guestОценок пока нет
- CNC ProgДокумент38 страницCNC ProgPoornima JoshiОценок пока нет
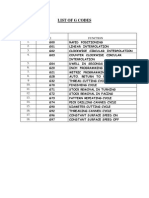
- List of G Codes: SR - NO. Code Function 1. 2. 3. 4Документ28 страницList of G Codes: SR - NO. Code Function 1. 2. 3. 4pmagrawal100% (1)
- CNC Machining ManualДокумент31 страницаCNC Machining ManualRickОценок пока нет
- Experiment No 1: CNC TURNING: MEP310 - Manufacturing Process Automation Lab ManualДокумент10 страницExperiment No 1: CNC TURNING: MEP310 - Manufacturing Process Automation Lab ManualBandam Nitish kumarОценок пока нет
- 8200T CNC Lathe Programming Manual V2.2Документ330 страниц8200T CNC Lathe Programming Manual V2.2ahmed kamalОценок пока нет
- Cad Cam End Sem VDДокумент90 страницCad Cam End Sem VDDerik NelsonОценок пока нет
- CNC1Документ91 страницаCNC1Liv CBОценок пока нет
- CNC MachinesДокумент26 страницCNC MachinesRahul KumarОценок пока нет
- Ch-11 NC CNC DNC FMS Automation and RoboticsДокумент143 страницыCh-11 NC CNC DNC FMS Automation and RoboticsShafiq AhmadОценок пока нет
- Industrial: Under The Guidence Of: BYДокумент22 страницыIndustrial: Under The Guidence Of: BYJaspreet singhОценок пока нет
- Computer Numerical Control Programming Basics: DefinitionsДокумент8 страницComputer Numerical Control Programming Basics: DefinitionsActem PmeОценок пока нет
- CNC1Документ91 страницаCNC1saileshmuraliОценок пока нет
- CNC Basic & Prog.Документ89 страницCNC Basic & Prog.Christine BrownОценок пока нет
- Series8000LatheOperation PDFДокумент324 страницыSeries8000LatheOperation PDFSnaldo EstradaОценок пока нет
- Solution of Cim AsignmentДокумент49 страницSolution of Cim AsignmentP20MF010MANGESH SHARMAОценок пока нет
- Part Programming: Unit II 2nd EvaluationДокумент14 страницPart Programming: Unit II 2nd EvaluationEduardo ResendizОценок пока нет
- Introduction To G-Code Programming: Computer Integrated ManufacturingДокумент34 страницыIntroduction To G-Code Programming: Computer Integrated Manufacturinghasan alsarrafОценок пока нет
- CNC 5TH SemДокумент8 страницCNC 5TH SemdibyenindusОценок пока нет
- My Summer Internship (Autosaved)Документ15 страницMy Summer Internship (Autosaved)Akarsh DaradОценок пока нет
- CNC Project FullДокумент22 страницыCNC Project FullDebabrata NandaОценок пока нет
- MSC Lecture 6Документ28 страницMSC Lecture 6Chán Chênh VênhОценок пока нет
- 11 Cad Cam CNC Programming MVVДокумент37 страниц11 Cad Cam CNC Programming MVVbassem smatiОценок пока нет
- Trumatic 200R Programing ManualДокумент42 страницыTrumatic 200R Programing ManualPPОценок пока нет
- Getting Started With CNC GcodeДокумент7 страницGetting Started With CNC Gcodeleonard1971Оценок пока нет
- Practical No1Документ8 страницPractical No1Dept. Of Mechanical Engg.Оценок пока нет
- 1 - Introduction To CNCДокумент21 страница1 - Introduction To CNCMuhammad EkaОценок пока нет
- Chapter 2 Part ProgrammingДокумент33 страницыChapter 2 Part ProgrammingKarnal 0388Оценок пока нет
- CNC CodesДокумент8 страницCNC CodesKevin DebryuneОценок пока нет
- Manual Part ProgrammingДокумент38 страницManual Part ProgrammingHot Shot100% (1)
- Report CNC f2036Документ16 страницReport CNC f2036Dasir Baluan AsiriОценок пока нет
- CNC BasicДокумент80 страницCNC BasickkОценок пока нет
- The CNC Handbook: Digital Manufacturing and Automation from CNC to Industry 4.0От EverandThe CNC Handbook: Digital Manufacturing and Automation from CNC to Industry 4.0Рейтинг: 5 из 5 звезд5/5 (1)
- The State of Gujarat Vs Manshankar Prabhasankar Dwivedi On 26 April, 1972Документ11 страницThe State of Gujarat Vs Manshankar Prabhasankar Dwivedi On 26 April, 1972C.K. VishwakarmaОценок пока нет
- Academic Calendar 2013 14Документ5 страницAcademic Calendar 2013 14C.K. VishwakarmaОценок пока нет
- Scheme - e Fifth Semester - PG, PTДокумент46 страницScheme - e Fifth Semester - PG, PTC.K. VishwakarmaОценок пока нет
- Engg CollegesДокумент121 страницаEngg CollegesC.K. VishwakarmaОценок пока нет
- The Magical Diaries of Ethel ArcherДокумент7 страницThe Magical Diaries of Ethel Archerleeghancock100% (1)
- E5170s-22 LTE CPE - Quick Start Guide - 01 - English - ErP - C - LДокумент24 страницыE5170s-22 LTE CPE - Quick Start Guide - 01 - English - ErP - C - LNelsonОценок пока нет
- Effectives of e Wallets NewДокумент15 страницEffectives of e Wallets NewRicardo SantosОценок пока нет
- Globalization and Challenges To Secondary EducationДокумент46 страницGlobalization and Challenges To Secondary Educationsollu786_889163149Оценок пока нет
- Material Safety Data Sheet: Manufacturer Pt. Bital AsiaДокумент3 страницыMaterial Safety Data Sheet: Manufacturer Pt. Bital AsiaediОценок пока нет
- Small Incision Cataract SurgeryДокумент249 страницSmall Incision Cataract SurgeryAillen YovitaОценок пока нет
- Lubi Dewatering PumpДокумент28 страницLubi Dewatering PumpSohanlal ChouhanОценок пока нет
- Content Kartilya NG Katipunan: Kataastaasan, Kagalanggalangang Katipunan NG Mga Anak NG Bayan)Документ6 страницContent Kartilya NG Katipunan: Kataastaasan, Kagalanggalangang Katipunan NG Mga Anak NG Bayan)AngelaОценок пока нет
- Dossier 015 enДокумент5 страницDossier 015 enAshok KumarОценок пока нет
- The Real World An Introduction To Sociology Test Bank SampleДокумент28 страницThe Real World An Introduction To Sociology Test Bank SampleMohamed M YusufОценок пока нет
- Dialogue-2: Problem of Our CountryДокумент6 страницDialogue-2: Problem of Our CountrysiamОценок пока нет
- 1982 B47 Lehigh County Gunsmithing FamiliesДокумент12 страниц1982 B47 Lehigh County Gunsmithing FamiliesAmr DeabesОценок пока нет
- LEASE CONTRACT Taytay Residentialhouse Kei Inagaki Nena TrusaДокумент6 страницLEASE CONTRACT Taytay Residentialhouse Kei Inagaki Nena TrusaJaime GonzalesОценок пока нет
- Neon Wilderness MenuДокумент2 страницыNeon Wilderness MenuAlisa HОценок пока нет
- Literature ReviewДокумент7 страницLiterature Reviewapi-353923446Оценок пока нет
- Admission Sos 2013-14090513 PDFДокумент21 страницаAdmission Sos 2013-14090513 PDFmanoj31285manojОценок пока нет
- HLX 150Документ44 страницыHLX 150menendez2050100% (1)
- Ap Government Imperial PresidencyДокумент2 страницыAp Government Imperial Presidencyapi-234443616Оценок пока нет
- Intro To Semiology Reading NotesДокумент6 страницIntro To Semiology Reading NotesRyan DrakeОценок пока нет
- The Appropriate Biochemical Oxygen Demand Concentration For Designing Domestic Wastewater Treatment PlantДокумент8 страницThe Appropriate Biochemical Oxygen Demand Concentration For Designing Domestic Wastewater Treatment PlantabdulОценок пока нет
- Proofreading: Basic Guide (Research)Документ34 страницыProofreading: Basic Guide (Research)Mary Christelle100% (1)
- Essentials of Materials Science and Engineering Si Edition 3rd Edition Askeland Solutions ManualДокумент11 страницEssentials of Materials Science and Engineering Si Edition 3rd Edition Askeland Solutions Manualjeffreyhayesagoisypdfm100% (13)
- People Vs SB - Paredes - Ex Post FactoДокумент2 страницыPeople Vs SB - Paredes - Ex Post FactoMara Aleah CaoileОценок пока нет
- Comparative Analysis of Motivation TheoriesДокумент14 страницComparative Analysis of Motivation TheoriesNomvelo MajolaОценок пока нет
- Allama Iqbal Open University, Islamabad: (Secondary Teacher Education Department) WarningДокумент2 страницыAllama Iqbal Open University, Islamabad: (Secondary Teacher Education Department) WarningAiNa KhanОценок пока нет
- ACO S Range BrochureДокумент20 страницACO S Range BrochureSyed RaziuddinОценок пока нет
- Reich 0001 PDFДокумент87 страницReich 0001 PDFYordys Domínguez RodríguezОценок пока нет
- Mutants Genetic Gladiators Hack PDFДокумент2 страницыMutants Genetic Gladiators Hack PDFFercho GarciaОценок пока нет
- Police Forces and The Administration of Justice in Tanzania.Документ6 страницPolice Forces and The Administration of Justice in Tanzania.Praygod Manase100% (2)
- Qualitative Research Chapter 1-5Документ16 страницQualitative Research Chapter 1-5Mikhaela Centeno100% (1)