Вам также может понравиться
- 06 Ankit Jain - Current Scenario of Venture CapitalДокумент38 страниц06 Ankit Jain - Current Scenario of Venture CapitalSanjay KashyapОценок пока нет
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- Air Microbiology 2018 - IswДокумент26 страницAir Microbiology 2018 - IswOktalia Suci AnggraeniОценок пока нет
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- DODGER: Book Club GuideДокумент2 страницыDODGER: Book Club GuideEpicReadsОценок пока нет
- Determination of Physicochemical Pollutants in Wastewater and Some Food Crops Grown Along Kakuri Brewery Wastewater Channels, Kaduna State, NigeriaДокумент5 страницDetermination of Physicochemical Pollutants in Wastewater and Some Food Crops Grown Along Kakuri Brewery Wastewater Channels, Kaduna State, NigeriamiguelОценок пока нет
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- Jesus Hold My Hand EbДокумент2 страницыJesus Hold My Hand EbGregg100% (3)
- Signal&Systems - Lab Manual - 2021-1Документ121 страницаSignal&Systems - Lab Manual - 2021-1telecom_numl8233Оценок пока нет
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
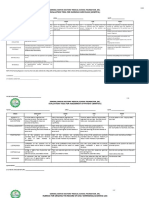
- PEDIA OPD RubricsДокумент11 страницPEDIA OPD RubricsKylle AlimosaОценок пока нет
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- The Civil Mutinies of Romeo and Juliet: Glenn ClarkДокумент21 страницаThe Civil Mutinies of Romeo and Juliet: Glenn ClarkmilcahОценок пока нет
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- Explained - How To Read Q1 GDP Data - Explained News, The Indian ExpressДокумент11 страницExplained - How To Read Q1 GDP Data - Explained News, The Indian ExpresshabeebОценок пока нет
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- Surge Protectionfor ACMachineryДокумент8 страницSurge Protectionfor ACMachineryvyroreiОценок пока нет
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- Event Planning Sample Cover Letter and ItineraryДокумент6 страницEvent Planning Sample Cover Letter and ItineraryWhitney Mae HaddardОценок пока нет
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Filipino Chicken Cordon BleuДокумент7 страницFilipino Chicken Cordon BleuHazel Castro Valentin-VillamorОценок пока нет
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- OrderFlow Charts and Notes 19th Sept 17 - VtrenderДокумент9 страницOrderFlow Charts and Notes 19th Sept 17 - VtrenderSinghRaviОценок пока нет
- Corelation & Multiple Regression AnalysisДокумент28 страницCorelation & Multiple Regression AnalysisSaad Bin Tariq100% (1)
- Judicial Review of Legislative ActionДокумент14 страницJudicial Review of Legislative ActionAnushka SinghОценок пока нет
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- SOLO FrameworkДокумент12 страницSOLO FrameworkMaureen Leafeiiel Salahid100% (2)
- Does Social Media Influence Consumer Buying Behavior An Investigation of Recommendations and PurchasesДокумент7 страницDoes Social Media Influence Consumer Buying Behavior An Investigation of Recommendations and Purchasesyash_28Оценок пока нет
- Kangaroo High Build Zinc Phosphate PrimerДокумент2 страницыKangaroo High Build Zinc Phosphate PrimerChoice OrganoОценок пока нет
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- Danese and Romano (2011) ModerationДокумент14 страницDanese and Romano (2011) ModerationUmer NaseemОценок пока нет
- Peer-to-Peer Lending Using BlockchainДокумент22 страницыPeer-to-Peer Lending Using BlockchainLuis QuevedoОценок пока нет
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- Acitve and Passive VoiceДокумент3 страницыAcitve and Passive VoiceRave LegoОценок пока нет
- Task 2 - The Nature of Linguistics and LanguageДокумент8 страницTask 2 - The Nature of Linguistics and LanguageValentina Cardenas VilleroОценок пока нет
- EMP Step 2 6 Week CalendarДокумент3 страницыEMP Step 2 6 Week CalendarN VОценок пока нет
- TG - Health 3 - Q3Документ29 страницTG - Health 3 - Q3LouieОценок пока нет
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- Anti Dump ch-84Документ36 страницAnti Dump ch-84Tanwar KeshavОценок пока нет
- Agrarian ReformДокумент40 страницAgrarian ReformYannel Villaber100% (2)
- PDF - Unpacking LRC and LIC Calculations For PC InsurersДокумент14 страницPDF - Unpacking LRC and LIC Calculations For PC Insurersnod32_1206Оценок пока нет
- Especificação - PneusДокумент10 страницEspecificação - Pneusmarcos eduОценок пока нет
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- Pudlo CWP TDS 2Документ4 страницыPudlo CWP TDS 2azharОценок пока нет
- COSL Brochure 2023Документ18 страницCOSL Brochure 2023DaniloОценок пока нет