Вам также может понравиться
- Cours STRATEGIE DE MAINTENANCE PDFДокумент67 страницCours STRATEGIE DE MAINTENANCE PDFamekhzoumi80% (5)
- Chap 3Документ37 страницChap 3Yassine TouhamiОценок пока нет
- Les Liaisons Cinématiques Sur CATIA V5Документ37 страницLes Liaisons Cinématiques Sur CATIA V5abir bzОценок пока нет
- TherystorДокумент4 страницыTherystorDON DEVATTIОценок пока нет
- Manuel de Programmation G-CodeДокумент538 страницManuel de Programmation G-CodeJorge Amaral100% (14)
- Systeme Hydraulique Et Pneumatique Master 1 Fabrication MecaniqueДокумент20 страницSysteme Hydraulique Et Pneumatique Master 1 Fabrication MecaniqueAch RafОценок пока нет
- 45 Mecanique-VibratoireДокумент25 страниц45 Mecanique-VibratoireMohamed Taha MhiriОценок пока нет
- TP MFDPДокумент11 страницTP MFDPOussema TrikiОценок пока нет
- Lagrange CoursДокумент30 страницLagrange CoursHorseman AnassОценок пока нет
- 01programme 2STM PDFДокумент9 страниц01programme 2STM PDFMajda El-aouniОценок пока нет
- Chapitre V Analyse Dimensionnelle PDFДокумент5 страницChapitre V Analyse Dimensionnelle PDFFatma Zohra OUIRОценок пока нет
- CalculДокумент18 страницCalculSalah Eddine ChouikhОценок пока нет
- S623.2 Comportement Des MecanismesДокумент3 страницыS623.2 Comportement Des MecanismesGhada Mouedhen100% (2)
- MN I Ver01 Part01Документ30 страницMN I Ver01 Part01Nathaniel Nerquaye-tetteh100% (1)
- Chapitre III - Mobilité Et Hyperstatisme Partie 3Документ3 страницыChapitre III - Mobilité Et Hyperstatisme Partie 3Lamia OhrcheОценок пока нет
- Calcul D'un Volant D'inertieДокумент19 страницCalcul D'un Volant D'inertieNathan KibilaОценок пока нет
- Mécanique Des Fluides - Résumé PDFДокумент16 страницMécanique Des Fluides - Résumé PDFkhalidОценок пока нет
- Examen de Conception Mécanique 2 Ième Année INSA Ingénierie de La Construction. Pont À Travée Mobile PDFДокумент9 страницExamen de Conception Mécanique 2 Ième Année INSA Ingénierie de La Construction. Pont À Travée Mobile PDFmabroukОценок пока нет
- Matrice D'inertieДокумент4 страницыMatrice D'inertieJean AbelaОценок пока нет
- 1-Liaisons en Parallèles: X Z Z XДокумент12 страниц1-Liaisons en Parallèles: X Z Z XLarbi Elbakkali100% (1)
- 14 Modelisation CinematiqueДокумент10 страниц14 Modelisation Cinematiquemezziwalid099411Оценок пока нет
- Cinetique Du SolideДокумент6 страницCinetique Du Solidemaat medОценок пока нет
- Exo13 Corigé PDFДокумент2 страницыExo13 Corigé PDFYoussef EL MliliОценок пока нет
- TP1 AbaqusДокумент8 страницTP1 AbaqusAhmed RACHDIОценок пока нет
- MMC PDFДокумент74 страницыMMC PDFDamien MirandaОценок пока нет
- Corrige Liais Equiv en ParalleleДокумент4 страницыCorrige Liais Equiv en ParalleleAyou HamОценок пока нет
- CHAPITRE 4 Cas PratiqueДокумент15 страницCHAPITRE 4 Cas Pratiquetunay cefОценок пока нет
- Exo 04 05 Stat Liaison Equiv Cor PDFДокумент4 страницыExo 04 05 Stat Liaison Equiv Cor PDFJourdan MbappeОценок пока нет
- Tp4 Calcul Raideur Rdm6 Optimisation de Structure Logiciel RDM Le ManДокумент5 страницTp4 Calcul Raideur Rdm6 Optimisation de Structure Logiciel RDM Le ManAmine RdОценок пока нет
- M5 - TD Dynamique de RotationДокумент4 страницыM5 - TD Dynamique de RotationkldmntОценок пока нет
- Cours Physique3 VibrationДокумент60 страницCours Physique3 VibrationYoucef SI100% (3)
- Guidage en Translation ProfДокумент12 страницGuidage en Translation Profslimani abdelilahОценок пока нет
- Flexion Simple (Bras Manipulateur)Документ2 страницыFlexion Simple (Bras Manipulateur)SERGIOОценок пока нет
- Bac SSI 2009 Actionneur Commande Vol A380Документ34 страницыBac SSI 2009 Actionneur Commande Vol A380kingofdarkness2010Оценок пока нет
- FSTS CONTROLE RDM 19.11.2014 Avec AnnexeДокумент4 страницыFSTS CONTROLE RDM 19.11.2014 Avec AnnexeSalah-eddine ZitiОценок пока нет
- L3 TP Fluent PDFДокумент36 страницL3 TP Fluent PDFGuediri Aimen100% (1)
- 03 - La FiabilitéДокумент24 страницы03 - La FiabilitéAnonymous msohLxqcqОценок пока нет
- 1agm 2019-2020 PDFДокумент11 страниц1agm 2019-2020 PDFAhmed AhmedОценок пока нет
- Cours MEF Scéance 1&2&3Документ74 страницыCours MEF Scéance 1&2&3ANDAHMOU SoulaimanОценок пока нет
- UntitledДокумент78 страницUntitledAbdessamad Ben-amarОценок пока нет
- Torseur de CohesionДокумент10 страницTorseur de CohesionlamiabejaouiОценок пока нет
- TD - 1 MMC m1 - CM 20 21Документ1 страницаTD - 1 MMC m1 - CM 20 21Farouk GhanemОценок пока нет
- Rapport de Mini Projet DДокумент17 страницRapport de Mini Projet DOumar TraoréОценок пока нет
- Reference Dynamique Du RotorДокумент7 страницReference Dynamique Du Rotorromy94496Оценок пока нет
- RMChap5 (Cisaillement) PDFДокумент33 страницыRMChap5 (Cisaillement) PDFsoufyanОценок пока нет
- Exam RDM Janv 2016 CompletДокумент6 страницExam RDM Janv 2016 Complethaythem mokdedОценок пока нет
- Université D'angers UFR Sciences L3 - LicenceДокумент2 страницыUniversité D'angers UFR Sciences L3 - LicencemdeelbОценок пока нет
- 03 Cisaillement RDMДокумент2 страницы03 Cisaillement RDMInes BhaОценок пока нет
- Statique GraphiqueДокумент3 страницыStatique Graphiquesallsmart100% (1)
- Courroies Trap TEXROPEДокумент54 страницыCourroies Trap TEXROPEAnonymous LfeGI2hMОценок пока нет
- Chapitre 7 Principe de SuperpositionДокумент4 страницыChapitre 7 Principe de SuperpositionMohamed DallagiОценок пока нет
- TP 6 - Moteur Asynchrone A Cage (Caractéristiques Et Fonctionnement) (1) (Récupéré)Документ12 страницTP 6 - Moteur Asynchrone A Cage (Caractéristiques Et Fonctionnement) (1) (Récupéré)ayanokojiОценок пока нет
- DM RDM Bras Telescopique - Cor - v2Документ3 страницыDM RDM Bras Telescopique - Cor - v2Mohamed El HajjamОценок пока нет
- MGD ScaraДокумент7 страницMGD ScaraKara RedaОценок пока нет
- Cours Résumé Sur Les Timers Du PIC (PIC18F252 Et Autres)Документ9 страницCours Résumé Sur Les Timers Du PIC (PIC18F252 Et Autres)barbareОценок пока нет
- TP Pompe CentrifugeДокумент6 страницTP Pompe CentrifugeWafa SaidaniОценок пока нет
- CH1 Théorie de La CoupeДокумент14 страницCH1 Théorie de La CoupeEya Essayel100% (1)
- Dynamique de Machines TournantesДокумент67 страницDynamique de Machines TournantesTôha MaïgaОценок пока нет
- Simulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysОт EverandSimulation des vibrations mécaniques, 2e édition: par Matlab, Simulink et AnsysОценок пока нет
- Superalliage: Résistant à la chaleur de 2700 degrés Fahrenheit générée par les moteurs à turbine pour être plus chaud, plus rapide et plus efficaceОт EverandSuperalliage: Résistant à la chaleur de 2700 degrés Fahrenheit générée par les moteurs à turbine pour être plus chaud, plus rapide et plus efficaceОценок пока нет
- Programmation CДокумент6 страницProgrammation CAymen HssainiОценок пока нет
- TP Initiation Au Fraisage CN PDFДокумент9 страницTP Initiation Au Fraisage CN PDFAymen HssainiОценок пока нет
- 03 - Les Differentes Formes de MaintenanceДокумент7 страниц03 - Les Differentes Formes de MaintenanceWognin MoïseОценок пока нет
- Initiation Au FraisageДокумент5 страницInitiation Au FraisageAymen HssainiОценок пока нет
- 120 - Couts de Maintenance - Prof - Retour Sur InvestissemenДокумент8 страниц120 - Couts de Maintenance - Prof - Retour Sur InvestissemenAymen Hssaini100% (1)
- 04 - Tds - Analyse de ParetoДокумент7 страниц04 - Tds - Analyse de ParetoSalah Eddine Chouikh100% (1)
- La RectificationДокумент2 страницыLa RectificationAymen HssainiОценок пока нет
- 04 - Les Outils de Base de Prise de Decision PDFДокумент5 страниц04 - Les Outils de Base de Prise de Decision PDFTriki Bilel100% (1)
- 02 Gestion Des Interventions PDFДокумент9 страниц02 Gestion Des Interventions PDFAymen HssainiОценок пока нет
- Gammes Maintenance Preventive MAERAДокумент4 страницыGammes Maintenance Preventive MAERAAymen HssainiОценок пока нет
- Guide PL7 Pro Connecter Et TransfererДокумент1 страницаGuide PL7 Pro Connecter Et TransfererAymen HssainiОценок пока нет
- TP Initiation Au Fraisage CN PDFДокумент9 страницTP Initiation Au Fraisage CN PDFAymen HssainiОценок пока нет
- Guide Pl7 Pro Connecter Et TransfererДокумент9 страницGuide Pl7 Pro Connecter Et TransfererdoudoutstmОценок пока нет
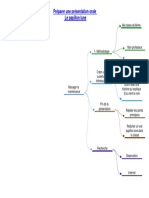
- Préparer Une Présentation Orale Le Papillon LuneДокумент1 страницаPréparer Une Présentation Orale Le Papillon LuneAymen HssainiОценок пока нет
- Guide Pratique Usine Automobile Du FuturДокумент61 страницаGuide Pratique Usine Automobile Du FuturAymen HssainiОценок пока нет
- Guide Pl7 Pro Connecter Et TransfererДокумент9 страницGuide Pl7 Pro Connecter Et TransfererdoudoutstmОценок пока нет
- JSFS 2000 141 3 3 0Документ7 страницJSFS 2000 141 3 3 0Aymen HssainiОценок пока нет
- FreДокумент347 страницFreAymen HssainiОценок пока нет
- Systeme Injection HdiДокумент145 страницSysteme Injection Hdicedricvillar100% (15)
- Equipement Du LaboratoireДокумент170 страницEquipement Du LaboratoireHeart King100% (1)
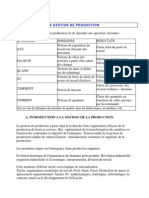
- Module Gestion de La ProductionДокумент23 страницыModule Gestion de La ProductionAymen HssainiОценок пока нет
- KONE GuideEntretienMaintenanceSécurité 2016Документ30 страницKONE GuideEntretienMaintenanceSécurité 2016Aymen HssainiОценок пока нет
- Cours PDFДокумент150 страницCours PDFAymen HssainiОценок пока нет
- 1hydrauliqParisTech PDFДокумент34 страницы1hydrauliqParisTech PDFAymen HssainiОценок пока нет
- Chrono 01 PDFДокумент32 страницыChrono 01 PDFAymen HssainiОценок пока нет
- 2016 - 05 - General Storage Recommendations For Spare Parts - FRДокумент2 страницы2016 - 05 - General Storage Recommendations For Spare Parts - FRAymen HssainiОценок пока нет
- Cours PDFДокумент150 страницCours PDFAymen HssainiОценок пока нет
- Module Gestion de La ProductionДокумент78 страницModule Gestion de La ProductionEl Jaouad67% (3)
- Séance 10 - P3 - CH2Документ18 страницSéance 10 - P3 - CH2Mohsine DriowyaОценок пока нет
- Diagramme de Lair Humide CosticДокумент4 страницыDiagramme de Lair Humide Costicahmed chakrounОценок пока нет
- Corrigé Devoir de Contrôle N°1: ChimieДокумент2 страницыCorrigé Devoir de Contrôle N°1: ChimieRiadh Marouani100% (1)
- Géotechnique Pont PFEДокумент72 страницыGéotechnique Pont PFEAhmed El EuchiОценок пока нет
- Génie Énergétique - Exercices Et Problèmes de Thermodynamique - Des Principes Aux Applications Aux Machines - Niveau BДокумент9 страницGénie Énergétique - Exercices Et Problèmes de Thermodynamique - Des Principes Aux Applications Aux Machines - Niveau Bياسين بوعيشي0% (1)
- Chapitre 2: Les Séismes Et Leur Relation Avec La Tectonique Des PlaquesДокумент46 страницChapitre 2: Les Séismes Et Leur Relation Avec La Tectonique Des PlaquesHamid BerradiОценок пока нет
- Biophysique Solutions ÉlectrolytiquesДокумент15 страницBiophysique Solutions ÉlectrolytiquesNabil holmes100% (3)
- TH4887Документ158 страницTH4887KEVIIN JOEL YONDJEU FEUBOОценок пока нет
- Leau Dans Le Sol IIДокумент17 страницLeau Dans Le Sol IIInconnu ADZОценок пока нет
- Corps NoirДокумент21 страницаCorps NoirKhaoula LakhfifОценок пока нет
- Cours SoudageДокумент29 страницCours Soudageibtihaj moulouad50% (2)
- Partie II-Physique - Electricté - UPAB - 2022Документ14 страницPartie II-Physique - Electricté - UPAB - 2022alasanec392Оценок пока нет
- Chapitre 3 Traction Et Compression PDFДокумент7 страницChapitre 3 Traction Et Compression PDFMaha KarrayОценок пока нет
- Matériaux de Construction Chapitre1-IntoductionДокумент16 страницMatériaux de Construction Chapitre1-Intoductionkzi itaОценок пока нет
- Beni-Mellal-Khenifra Examen Regional PC 2021 Sujet PDFДокумент3 страницыBeni-Mellal-Khenifra Examen Regional PC 2021 Sujet PDFAhmed Taha RazinОценок пока нет
- Cours de Sismologie Grenoble PDFДокумент50 страницCours de Sismologie Grenoble PDFhassan bachuОценок пока нет
- LA DILATATIONne2Документ1 страницаLA DILATATIONne2Simo ELyamaniОценок пока нет
- PC1ere CD - P6,5 Champ ElestrostatiqueДокумент9 страницPC1ere CD - P6,5 Champ ElestrostatiqueAdopo100% (1)
- Chap 02 - Le Champs Electrique DiaposДокумент23 страницыChap 02 - Le Champs Electrique Diaposluffycapitaine0221Оценок пока нет
- Exiii 2Документ3 страницыExiii 2Art Sceno100% (1)
- 24 Chorfi PDFДокумент6 страниц24 Chorfi PDFsalah mohammedОценок пока нет
- rdm2 - Cours - 1-Sollicitations Composées (Simples)Документ22 страницыrdm2 - Cours - 1-Sollicitations Composées (Simples)all of asОценок пока нет
- Projet DiagnosticДокумент30 страницProjet Diagnosticamrisalma72Оценок пока нет
- TP Bois GC4Документ9 страницTP Bois GC4Nick Jordan KEMBOU WOUNTSAОценок пока нет
- Cours MASДокумент22 страницыCours MASFlame KaiserОценок пока нет
- MagnétostatiqueДокумент35 страницMagnétostatiquejlidsoufiane17Оценок пока нет
- Traitement Thermique VF-CPR2-2017-2018Документ55 страницTraitement Thermique VF-CPR2-2017-2018HOUSSAME NAIMОценок пока нет
- Physico Chimie Des Lubrifiants Amp Theorie de La Lubrification P 87 A 89Документ6 страницPhysico Chimie Des Lubrifiants Amp Theorie de La Lubrification P 87 A 89AdikoDenzeyAnonh100% (1)
- حسينДокумент15 страницحسينhoussam badriОценок пока нет