Вам также может понравиться
- FinTech Journey and The HurdlesДокумент22 страницыFinTech Journey and The HurdlesDudenОценок пока нет
- Financial MathematicsДокумент107 страницFinancial MathematicsDudenОценок пока нет
- Blockchains: Where We Are and How They Will Change Risk ManagementДокумент16 страницBlockchains: Where We Are and How They Will Change Risk ManagementDudenОценок пока нет
- Exchange Rates and Monetary Policy UncertaintyДокумент48 страницExchange Rates and Monetary Policy UncertaintyDudenОценок пока нет
- Behavioural Risk ManagementДокумент20 страницBehavioural Risk ManagementDudenОценок пока нет
- Post-Energy RiskДокумент23 страницыPost-Energy RiskDudenОценок пока нет
- Cybersecurity Is Your Disclosure Discovery SecureДокумент18 страницCybersecurity Is Your Disclosure Discovery SecureDudenОценок пока нет
- Minority-Led Activist Hedge FundДокумент4 страницыMinority-Led Activist Hedge FundDudenОценок пока нет
- Challenges To Implementing CECLДокумент20 страницChallenges To Implementing CECLDudenОценок пока нет
- Alternative Approaches To Modelling Non Maturing DepositsДокумент23 страницыAlternative Approaches To Modelling Non Maturing DepositsDuden100% (1)
- Accounting For Insurance LiabilitiesДокумент18 страницAccounting For Insurance LiabilitiesDudenОценок пока нет
- P SyllabusДокумент5 страницP SyllabusDudenОценок пока нет
- Investment & Financial Markets Exam-July 2019: Normal Distribution Calculator Prometric Web SiteДокумент12 страницInvestment & Financial Markets Exam-July 2019: Normal Distribution Calculator Prometric Web SiteDudenОценок пока нет
- Probability Measures in Financial MathematicsДокумент3 страницыProbability Measures in Financial MathematicsDudenОценок пока нет
- Bonus Credit Government DebtДокумент1 страницаBonus Credit Government DebtDudenОценок пока нет
- Bonus Credit Equity FormsДокумент1 страницаBonus Credit Equity FormsDudenОценок пока нет
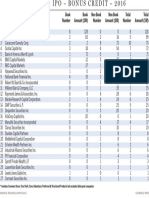
- Bonus Credit Equity IpoДокумент1 страницаBonus Credit Equity IpoDudenОценок пока нет
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- 300.91C - Fire Alarm System Pre-Test and Acceptance Test Checklist 3-27-14Документ2 страницы300.91C - Fire Alarm System Pre-Test and Acceptance Test Checklist 3-27-14mthuyaОценок пока нет
- China Care Foundation - Fall 2010 NewsletterДокумент8 страницChina Care Foundation - Fall 2010 NewsletterChinaCareОценок пока нет
- AP Human Geography Review Unit 2Документ18 страницAP Human Geography Review Unit 2BaselOsman50% (2)
- Research Proposal PHDДокумент19 страницResearch Proposal PHDSuleiman Mukhtar100% (2)
- NTDCДокумент8 страницNTDCjaved_hanifОценок пока нет
- Module 5: Safety and Health at Work: Participant's HandbookДокумент24 страницыModule 5: Safety and Health at Work: Participant's HandbookChristian Surio RamosОценок пока нет
- RadarДокумент65 страницRadarAsifa LiaqatОценок пока нет
- SpeedFace M4 DatasheetДокумент2 страницыSpeedFace M4 DatasheetRENJITH K NAIRОценок пока нет
- HandbikeДокумент10 страницHandbikeLely JuniariОценок пока нет
- Vision For Mobile Robot Navigation - A Survey PDFДокумент31 страницаVision For Mobile Robot Navigation - A Survey PDFtes donlodОценок пока нет
- Versana Premier Transducer GuideДокумент4 страницыVersana Premier Transducer GuideDigo OtávioОценок пока нет
- Full Download Test Bank For Environmental Economics and Management Theory Policy and Applications 6th Edition Callan PDF Full ChapterДокумент27 страницFull Download Test Bank For Environmental Economics and Management Theory Policy and Applications 6th Edition Callan PDF Full Chapterscissionrideau941m100% (20)
- Blood Glucose Units Conversion Table: Endocrinology & Diabetes UnitДокумент1 страницаBlood Glucose Units Conversion Table: Endocrinology & Diabetes UnitDrFarah Emad AliОценок пока нет
- Service Manual: RP-6000 MK6 LTD RP-6000 MK6 BДокумент44 страницыService Manual: RP-6000 MK6 LTD RP-6000 MK6 BFivor EdwardsОценок пока нет
- L15 - Parallel Magnetic CircuitsДокумент6 страницL15 - Parallel Magnetic CircuitsParikshit MishraОценок пока нет
- Vital Judo Throwing TechniquesДокумент193 страницыVital Judo Throwing TechniquesJuan Jose Opazo Carvajal100% (1)
- Scattered Pearls: Selected Sayings and Anecdotes of The Illustrious AuliyaaДокумент103 страницыScattered Pearls: Selected Sayings and Anecdotes of The Illustrious AuliyaaYeye17100% (1)
- Fractal Audio Footswitch Functions Guide PDFДокумент22 страницыFractal Audio Footswitch Functions Guide PDFerikОценок пока нет
- Greyhound Free Patt.Документ14 страницGreyhound Free Patt.claire_garlandОценок пока нет
- Air Cooler With Checking DoorДокумент2 страницыAir Cooler With Checking DoorSuraj KumarОценок пока нет
- Reproduction WorksheetДокумент5 страницReproduction WorksheetJENY VEV GAYOMAОценок пока нет
- Weichai WP10 Euro IIIДокумент35 страницWeichai WP10 Euro IIIBakery HamzaОценок пока нет
- Rockwell Allen BradleyДокумент73 страницыRockwell Allen BradleymaygomezОценок пока нет
- Chapter 4 TurbineДокумент56 страницChapter 4 TurbineHabtamu Tkubet EbuyОценок пока нет
- Safety Data Sheet: Section 1. Identification Jotun Essence Easy CleanДокумент11 страницSafety Data Sheet: Section 1. Identification Jotun Essence Easy CleanHồng PhongОценок пока нет
- Yehuda Berg Satan PDFДокумент77 страницYehuda Berg Satan PDFOswaldo Archundia100% (7)
- Maharashtra Brochure (2023)Документ4 страницыMaharashtra Brochure (2023)assmexellenceОценок пока нет
- Brenda Patton Guided Reflection QuestionsДокумент3 страницыBrenda Patton Guided Reflection QuestionsCameron JanzenОценок пока нет
- Local AnesthesiaДокумент55 страницLocal AnesthesiaAhmed MagdyОценок пока нет
- Quiz Business MathДокумент5 страницQuiz Business MathMA. JEMARIS SOLISОценок пока нет