Вам также может понравиться
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeОт EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeРейтинг: 4 из 5 звезд4/5 (5795)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceОт EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceРейтинг: 4 из 5 звезд4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItОт EverandNever Split the Difference: Negotiating As If Your Life Depended On ItРейтинг: 4.5 из 5 звезд4.5/5 (838)
- The Yellow House: A Memoir (2019 National Book Award Winner)От EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Рейтинг: 4 из 5 звезд4/5 (98)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryОт EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryРейтинг: 3.5 из 5 звезд3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaОт EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaРейтинг: 4.5 из 5 звезд4.5/5 (266)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureОт EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureРейтинг: 4.5 из 5 звезд4.5/5 (474)
- The Little Book of Hygge: Danish Secrets to Happy LivingОт EverandThe Little Book of Hygge: Danish Secrets to Happy LivingРейтинг: 3.5 из 5 звезд3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerОт EverandThe Emperor of All Maladies: A Biography of CancerРейтинг: 4.5 из 5 звезд4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnОт EverandTeam of Rivals: The Political Genius of Abraham LincolnРейтинг: 4.5 из 5 звезд4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersОт EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersРейтинг: 4.5 из 5 звезд4.5/5 (345)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyОт EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyРейтинг: 3.5 из 5 звезд3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaОт EverandThe Unwinding: An Inner History of the New AmericaРейтинг: 4 из 5 звезд4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreОт EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreРейтинг: 4 из 5 звезд4/5 (1091)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)От EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Рейтинг: 4.5 из 5 звезд4.5/5 (121)
- Technical Datasheet of The Air Terminal - Ioniflash Mach NG 60Документ2 страницыTechnical Datasheet of The Air Terminal - Ioniflash Mach NG 60Taraque Mohammad DostogirОценок пока нет
- Multiprocessor Architectures and ProgrammingДокумент89 страницMultiprocessor Architectures and ProgrammingKULDEEP NARAYAN MINJОценок пока нет
- King Air B200 Operating Handbook 2010 CAE SimufliteДокумент174 страницыKing Air B200 Operating Handbook 2010 CAE Simuflitealbucur100% (7)
- UCEE Assignment 2 AnswerДокумент24 страницыUCEE Assignment 2 AnswerSelva BalajiОценок пока нет
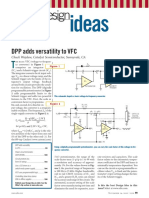
- VFC PDFДокумент7 страницVFC PDFtommy99Оценок пока нет
- Ultrasonic Pulse Velocity MethodДокумент2 страницыUltrasonic Pulse Velocity MethodSzeJinTan100% (1)
- AZEOTROPIC DATA (Advances in Chemistry Volume 6) PDFДокумент331 страницаAZEOTROPIC DATA (Advances in Chemistry Volume 6) PDFSachikanta PradhanОценок пока нет
- ES MT 0106 - REV1.30 - 24122019 - 6021282 DIAM 4100 Rev 1 30 - EN 2Документ64 страницыES MT 0106 - REV1.30 - 24122019 - 6021282 DIAM 4100 Rev 1 30 - EN 2Paix AvousОценок пока нет
- Transient Stability AnalysisДокумент30 страницTransient Stability AnalysisRemaz Mutasim Yusuf100% (1)
- Meteorology and Natural Purification ProcessesДокумент53 страницыMeteorology and Natural Purification ProcessesAnonymous vIGq79100% (1)
- Agfa Range of Films: Technical DataДокумент8 страницAgfa Range of Films: Technical DataCHERPINОценок пока нет
- ICSE Class 10 Biology Sample Papers 1 2021Документ11 страницICSE Class 10 Biology Sample Papers 1 2021Pranava Surya VedanthamОценок пока нет
- Water Cycle Algorithm For Solving Multi-Objective Optimization ProblemsДокумент17 страницWater Cycle Algorithm For Solving Multi-Objective Optimization ProblemsCeline DenalyОценок пока нет
- Agricolture CookbookДокумент10 страницAgricolture CookbookevalenciaОценок пока нет
- Prossesor Intel I3 6100 Box (3.7 GHZ, C6MB, Skylake Series) Rp. 1.540.000Документ8 страницProssesor Intel I3 6100 Box (3.7 GHZ, C6MB, Skylake Series) Rp. 1.540.000Yusron MuttaqinОценок пока нет
- P R o F e S S I o N A L S U M M A R yДокумент6 страницP R o F e S S I o N A L S U M M A R yNive DitaОценок пока нет
- Model MCQДокумент23 страницыModel MCQRohan RaiОценок пока нет
- Excel Quickstart Guide From Beginner To Expert Excel Microsoft Office by William FischerДокумент7 страницExcel Quickstart Guide From Beginner To Expert Excel Microsoft Office by William FischerPruthvi Raja100% (1)
- TE 5170 Manual PDFДокумент40 страницTE 5170 Manual PDFJairo Giovanny HernándezОценок пока нет
- Modern Traffic Control System: Shiva Chandel, Shubhransh Yadav and Sandeep YadavДокумент4 страницыModern Traffic Control System: Shiva Chandel, Shubhransh Yadav and Sandeep Yadavanon_316329780Оценок пока нет
- 12 CH 2 CTPTДокумент6 страниц12 CH 2 CTPTMoe Thant OoОценок пока нет
- Treynor Black ModelДокумент20 страницTreynor Black ModelVaidyanathan RavichandranОценок пока нет
- Tubular Truss OptimizationДокумент124 страницыTubular Truss Optimizationarunkumar.mgsОценок пока нет
- Raspberry Pi Alamode CNC Controller - 13 Steps (With Pictures)Документ27 страницRaspberry Pi Alamode CNC Controller - 13 Steps (With Pictures)orangota100% (1)
- NCS - DIY For E63 - E64Документ13 страницNCS - DIY For E63 - E64Larken BradynОценок пока нет
- Laboratory Experiments - PhysicsДокумент36 страницLaboratory Experiments - PhysicsMayank AgarwalОценок пока нет
- Strength of MatrialДокумент36 страницStrength of MatrialahmedanyОценок пока нет
- SP QuestionДокумент28 страницSP QuestionPratik0% (1)
- Programming Worksheet 7Документ2 страницыProgramming Worksheet 7potholemaryОценок пока нет
- Numerical Modeling of Helical Pile PDFДокумент12 страницNumerical Modeling of Helical Pile PDFHizb UllahОценок пока нет