Вам также может понравиться
- Physique Micro-vibratoire et Forces InvisiblesОт EverandPhysique Micro-vibratoire et Forces InvisiblesРейтинг: 5 из 5 звезд5/5 (2)
- Sismique Réflexion: FondementsДокумент43 страницыSismique Réflexion: Fondementsdjeddi mabrouk100% (10)
- Hydraulique Coup de Bélier PDFДокумент109 страницHydraulique Coup de Bélier PDFAmina Ramina100% (2)
- Examen Geophysique 2012 - 2013Документ3 страницыExamen Geophysique 2012 - 2013ayari daliОценок пока нет
- Diagraphies Différées Et InterprétationДокумент48 страницDiagraphies Différées Et Interprétationdjeddi mabrouk100% (2)
- La Tectonique Des PlaquesДокумент5 страницLa Tectonique Des Plaquesamina0% (1)
- Notions de Temps Et ClimatДокумент2 страницыNotions de Temps Et ClimatSAKSIK100% (9)
- Propagation Des Ondes SismiquesДокумент19 страницPropagation Des Ondes Sismiquesdjeddi mabrouk86% (7)
- Propagation Des Ondes SismiquesДокумент19 страницPropagation Des Ondes Sismiquesdjeddi mabrouk86% (7)
- Methodes Sismiques. Comportement Élastique Des RochesДокумент15 страницMethodes Sismiques. Comportement Élastique Des Rochesdjeddi mabrouk88% (8)
- Production et propagation des sons: Les Grands Articles d'UniversalisОт EverandProduction et propagation des sons: Les Grands Articles d'UniversalisОценок пока нет
- Ondes PDFДокумент328 страницOndes PDFRakotoОценок пока нет
- Cours GEOPHYSIQUE MGP 1A NewДокумент56 страницCours GEOPHYSIQUE MGP 1A Newstema225Оценок пока нет
- 06C Subduction OceaniqДокумент200 страниц06C Subduction OceaniqAyad SaidОценок пока нет
- Livre PhysChimie2de - 2010 PDFДокумент192 страницыLivre PhysChimie2de - 2010 PDFrachid liassi100% (1)
- Ondes Et PropagationsДокумент17 страницOndes Et PropagationsAliOucharОценок пока нет
- Traitement Numerique Du Signal Sismique Reflexion Partie IIДокумент71 страницаTraitement Numerique Du Signal Sismique Reflexion Partie IIdjeddi mabroukОценок пока нет
- Traitement Numerique Du Signal Sismique Reflexion Partie IIДокумент71 страницаTraitement Numerique Du Signal Sismique Reflexion Partie IIdjeddi mabroukОценок пока нет
- Les Seismes Et Leur Relation Avec La Tectonique Des PlaquesДокумент2 страницыLes Seismes Et Leur Relation Avec La Tectonique Des PlaquesHicham Boukhatem100% (2)
- TP4 - Coup de BélierДокумент7 страницTP4 - Coup de BélierAhmed MediouniОценок пока нет
- Chapitre 1..inversionДокумент13 страницChapitre 1..inversionزوبير شطيОценок пока нет
- Vibration Et Ondes CoursДокумент124 страницыVibration Et Ondes CoursYassine Rékard100% (1)
- Td2 Méth-Géophysique 3agc (Ensam) 2019-2020 CorrectionДокумент6 страницTd2 Méth-Géophysique 3agc (Ensam) 2019-2020 CorrectionKawtar AddalОценок пока нет
- Chapitre 2 GéophysiqueДокумент16 страницChapitre 2 GéophysiqueIbti SemОценок пока нет
- Cours D'optique Geometrique CBGДокумент91 страницаCours D'optique Geometrique CBGJoas ElegbeОценок пока нет
- AntenneДокумент52 страницыAntenneBassma Jioudi100% (1)
- Modlisationenhydrogologie Chap01 121124160059 Phpapp02Документ46 страницModlisationenhydrogologie Chap01 121124160059 Phpapp02Imane AbdounОценок пока нет
- 1ére Devoir Bac 2019 SM HikmaДокумент4 страницы1ére Devoir Bac 2019 SM HikmaHAMADA1972100% (1)
- TCTDF Triade Couleur Test Dynamique Flash (Français)Документ13 страницTCTDF Triade Couleur Test Dynamique Flash (Français)C.O.M.A research -stopalienabduction-80% (5)
- Tectonique Et Interprtation deДокумент17 страницTectonique Et Interprtation deeddymassaОценок пока нет
- Coefficient de Reflexion Et de Transmission Des Ondes Sismiques (Amplitude Et Film Synthétique)Документ15 страницCoefficient de Reflexion Et de Transmission Des Ondes Sismiques (Amplitude Et Film Synthétique)djeddimabrouk75% (8)
- Prospection Tellurique Et Magnetotellurique PDFДокумент19 страницProspection Tellurique Et Magnetotellurique PDFlucasОценок пока нет
- Ondes Sismiques Enregistrees en PSVДокумент6 страницOndes Sismiques Enregistrees en PSVdjeddimabrouk50% (2)
- Impédance Acoustique en Sismique (Pseudo-Log D'impédance Acoustique)Документ5 страницImpédance Acoustique en Sismique (Pseudo-Log D'impédance Acoustique)djeddimabrouk67% (3)
- Divergence Spherique Et Absorption Des Ondes SismiquesДокумент11 страницDivergence Spherique Et Absorption Des Ondes Sismiquesdjeddimabrouk100% (5)
- Magnétotellurique: Relation Fondamentale (Formule de Cagniard)Документ29 страницMagnétotellurique: Relation Fondamentale (Formule de Cagniard)djeddi mabrouk91% (11)
- Magnétotellurique: Les Sources Naturelles Et Artificielles en MT Et EMДокумент27 страницMagnétotellurique: Les Sources Naturelles Et Artificielles en MT Et EMdjeddi mabrouk83% (6)
- Méthode Electromagnétique SlingramДокумент10 страницMéthode Electromagnétique Slingramdjeddi mabrouk100% (4)
- Chpitre 2 - Partie 1 - Tectonique Des PlaquesДокумент31 страницаChpitre 2 - Partie 1 - Tectonique Des PlaquesMohamed El Hadef MenasriОценок пока нет
- Analyse Réseaux HydroДокумент66 страницAnalyse Réseaux HydroSami Khemiri100% (3)
- Exercice OndesДокумент2 страницыExercice OndesmohaaamedОценок пока нет
- Cours 1 PHYS SPE-Analyse VectorielДокумент46 страницCours 1 PHYS SPE-Analyse Vectorielblau_uОценок пока нет
- Prospection Tellurique Et MagnetotelluriqueДокумент19 страницProspection Tellurique Et Magnetotelluriquedjeddi mabrouk100% (5)
- Methode MagnetiqueДокумент4 страницыMethode MagnetiqueYoucef AzzouziОценок пока нет
- Traitement Numérique Du Signal Sismique Reflexion Digital Processing of The Seismic Reflection SignalДокумент48 страницTraitement Numérique Du Signal Sismique Reflexion Digital Processing of The Seismic Reflection Signaldjeddi mabrouk100% (1)
- EXERCICE (Datation Au Carbone C14)Документ7 страницEXERCICE (Datation Au Carbone C14)Imed Benrhouma100% (2)
- Chapitre 2Документ100 страницChapitre 2imeneОценок пока нет
- TP 1 Geophys Sism Refraction 19 20 BenamgharДокумент4 страницыTP 1 Geophys Sism Refraction 19 20 BenamgharSERGIO0% (1)
- Usthb Exo PhysiqueДокумент26 страницUsthb Exo PhysiqueFaculté De Médecine Béchar0% (1)
- GravimetrieДокумент18 страницGravimetrieLouis BrougliОценок пока нет
- Etude de La Structure Interne de La Terre Par Les Ondes SéismiquesДокумент23 страницыEtude de La Structure Interne de La Terre Par Les Ondes Séismiquesdjeddi mabroukОценок пока нет
- Géol HistoriqueДокумент32 страницыGéol HistoriqueYô NêsОценок пока нет
- Géophysique BRGM Recherche EauДокумент25 страницGéophysique BRGM Recherche EauMansourLassouedОценок пока нет
- Corps NoirДокумент11 страницCorps NoirManuel ArzolaОценок пока нет
- Site PSV Chapitre 3Документ15 страницSite PSV Chapitre 3djeddimabrouk100% (4)
- Resistivité Et Conductivite Site 20 Avril 2015 PDFДокумент9 страницResistivité Et Conductivite Site 20 Avril 2015 PDFdjeddi mabroukОценок пока нет
- TD N 2 Aquisition Et Traitement SismiqueДокумент1 страницаTD N 2 Aquisition Et Traitement SismiqueLounes RababОценок пока нет
- Chap III - Précipitations Et Chap IV - EVAPO PDFДокумент45 страницChap III - Précipitations Et Chap IV - EVAPO PDFBassa Jean-Daniel100% (1)
- Tectonique Des PlaquesДокумент4 страницыTectonique Des PlaquesMohamed Khalil Mellal100% (1)
- Chapitre 2 La Polarisation ProvoquéeДокумент30 страницChapitre 2 La Polarisation ProvoquéeHiba Fg100% (2)
- TD-Sismologie Énoncé SVT1-2020-2021 PDFДокумент5 страницTD-Sismologie Énoncé SVT1-2020-2021 PDFYousra Mlk100% (1)
- TD - GravimétrieДокумент2 страницыTD - GravimétriearachidОценок пока нет
- Tectonique TDДокумент9 страницTectonique TDOssete BriceОценок пока нет
- Alae EXPOSE Sur L'eauДокумент28 страницAlae EXPOSE Sur L'eaukhaoula pawlaОценок пока нет
- Chapitre4 - Rayonnement Avec Facteur de FormeДокумент23 страницыChapitre4 - Rayonnement Avec Facteur de FormeRiech Fight100% (1)
- TD 2 Géo Interne SVT s2Документ7 страницTD 2 Géo Interne SVT s2sumaleeОценок пока нет
- Études sur la géologie, la paléontologie et l'ancienneté de l'homme: Le département de Lot-et-GaronneОт EverandÉtudes sur la géologie, la paléontologie et l'ancienneté de l'homme: Le département de Lot-et-GaronneОценок пока нет
- La Terre, sa formation et sa constitution actuelleОт EverandLa Terre, sa formation et sa constitution actuelleОценок пока нет
- 3.ondes Sonores Et Ultrasonores PDFДокумент4 страницы3.ondes Sonores Et Ultrasonores PDFkimmik100% (1)
- Chapitre Base Physique Des UltrasonДокумент13 страницChapitre Base Physique Des UltrasonFa TehОценок пока нет
- PolyTD ArchiveДокумент101 страницаPolyTD ArchiveHeeriling SololaОценок пока нет
- Chapitre 1 Acoustique G.MДокумент62 страницыChapitre 1 Acoustique G.MAYA OUEZGANОценок пока нет
- Traitement Numérique Du Signal Sismique Reflexion Digital Processing of The Seismic Reflection SignalДокумент48 страницTraitement Numérique Du Signal Sismique Reflexion Digital Processing of The Seismic Reflection Signaldjeddi mabrouk100% (1)
- Traitement Numerique Du Signal Sismique Reflexion Partie IIДокумент71 страницаTraitement Numerique Du Signal Sismique Reflexion Partie IIdjeddi mabroukОценок пока нет
- Sismique Reflexion Et Refraction: Les Principes de BaseДокумент47 страницSismique Reflexion Et Refraction: Les Principes de Basedjeddi mabrouk86% (7)
- Les Principes Fondamentaux de Propagation Des Ondes SismiquesДокумент26 страницLes Principes Fondamentaux de Propagation Des Ondes Sismiquesdjeddi mabrouk100% (5)
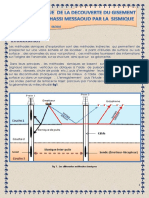
- Bref Historique de La Decouverte Du Gisement Petrolier de Hassi Messaoud Par La SismiqueДокумент8 страницBref Historique de La Decouverte Du Gisement Petrolier de Hassi Messaoud Par La Sismiquedjeddi mabrouk100% (3)
- Principe Des Methodes ElectromagnetiquesДокумент7 страницPrincipe Des Methodes Electromagnetiquesdjeddi mabrouk92% (12)
- Méthode Electromagnétique SlingramДокумент10 страницMéthode Electromagnétique Slingramdjeddi mabrouk100% (4)
- Contexte Geodynamique, Tectonique Et Sismologique Du Nord Oriental de L'algerieДокумент63 страницыContexte Geodynamique, Tectonique Et Sismologique Du Nord Oriental de L'algeriedjeddi mabrouk100% (5)
- Chapitre I: Diagraphies Sonique Et AcoustiqueДокумент13 страницChapitre I: Diagraphies Sonique Et Acoustiquedjeddimabrouk88% (16)
- Site PSV Chapitre 3Документ15 страницSite PSV Chapitre 3djeddimabrouk100% (4)
- Magnétotellurique: Relation Fondamentale (Formule de Cagniard)Документ29 страницMagnétotellurique: Relation Fondamentale (Formule de Cagniard)djeddi mabrouk91% (11)
- Prospection Tellurique Et MagnetotelluriqueДокумент19 страницProspection Tellurique Et Magnetotelluriquedjeddi mabrouk100% (5)
- Option TelecommunicationsДокумент93 страницыOption TelecommunicationsStone OkoОценок пока нет
- NR SVT FR 2020 PC (WWW - Pc1.ma)Документ4 страницыNR SVT FR 2020 PC (WWW - Pc1.ma)Mustapha ZakiОценок пока нет
- In 32013 CorДокумент7 страницIn 32013 CorBarthélemy HoubenОценок пока нет
- Aya de Yopougon Tome 5Документ2 страницыAya de Yopougon Tome 5gsxpvrrds4Оценок пока нет
- Electromag Pcgi2 ch6Документ34 страницыElectromag Pcgi2 ch6AbdelkhalekBenOmarОценок пока нет
- InerisДокумент168 страницInerisSabineMaalouf100% (1)
- DS1'G1Документ3 страницыDS1'G1salmaaddad456Оценок пока нет
- Turbulence Atmosphérique Et Sites AstronomiquesДокумент10 страницTurbulence Atmosphérique Et Sites AstronomiquesEric EnfertОценок пока нет
- PC PHYSIQUE CENTRALE 1 2002.extraitДокумент4 страницыPC PHYSIQUE CENTRALE 1 2002.extraitNadaОценок пока нет
- Série 1 PropgДокумент4 страницыSérie 1 Propgfad hmaОценок пока нет
- Activité 14.1 - La Diffraction IntroДокумент4 страницыActivité 14.1 - La Diffraction IntroRoucanieresОценок пока нет
- Contribution A La Caracterisation Non Destructive de Beton Arme Par La Methode Des UltrasonsДокумент53 страницыContribution A La Caracterisation Non Destructive de Beton Arme Par La Methode Des UltrasonsSAIB BRAHIMОценок пока нет
- Cours PSV3 DДокумент30 страницCours PSV3 DAllaoui mohamed dhiya eddine100% (2)
- Etat Art WDM SDH SonetДокумент132 страницыEtat Art WDM SDH SonetMar YemОценок пока нет
- Guide D'échographie 2017Документ456 страницGuide D'échographie 2017abdou rabiОценок пока нет
- Emman 21Документ3 страницыEmman 21Emmanuel NiomotiОценок пока нет
- Chapitre 2 AbДокумент5 страницChapitre 2 AbOmri OmarОценок пока нет
- Propagation Des Ondes Lumineuses Cours 5Документ4 страницыPropagation Des Ondes Lumineuses Cours 5Loïc ITOUAОценок пока нет
- Bac 2014 Bac Tech Epreuve Physique Session Controle Correction PDFДокумент5 страницBac 2014 Bac Tech Epreuve Physique Session Controle Correction PDFmomme deyahiОценок пока нет
- Devoir N°1 Type 1 S1 2bac - PCДокумент2 страницыDevoir N°1 Type 1 S1 2bac - PCZouhair SilОценок пока нет
- Chapitre 5 OndesДокумент9 страницChapitre 5 OndeszakariaОценок пока нет
- HyperfrequencesДокумент84 страницыHyperfrequencesHiî ChémОценок пока нет