Вам также может понравиться
- High-Performance D/A-Converters: Application to Digital TransceiversОт EverandHigh-Performance D/A-Converters: Application to Digital TransceiversОценок пока нет
- EVALSTPM33Документ6 страницEVALSTPM33Ivana PrezimeОценок пока нет
- Circuit Note: 12-Bit, 4-20ma Loop-Powered Thermocouple Measurement System Using ARM Cortex-M3Документ7 страницCircuit Note: 12-Bit, 4-20ma Loop-Powered Thermocouple Measurement System Using ARM Cortex-M3Srinivasa MuralidharaОценок пока нет
- RS232 转USB 方案DIY资料,已做成功Документ2 страницыRS232 转USB 方案DIY资料,已做成功李宏观Оценок пока нет
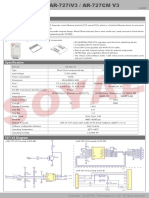
- AR-727iV3: Part NO. AR-727i V3 AR-727CM V3Документ4 страницыAR-727iV3: Part NO. AR-727i V3 AR-727CM V3jorge franco HerreraОценок пока нет
- AN93Документ307 страницAN93AhmedОценок пока нет
- Station Controller PDFДокумент7 страницStation Controller PDF1981todurkarОценок пока нет
- Low Power, 8.5 MW, 2.3 V To 5.5 V, Programmable Waveform GeneratorДокумент28 страницLow Power, 8.5 MW, 2.3 V To 5.5 V, Programmable Waveform GeneratorOana AndradaОценок пока нет
- Serial Communication ProtocolsДокумент32 страницыSerial Communication ProtocolsVissu Sweet100% (1)
- Debug Connector SpecificationДокумент4 страницыDebug Connector SpecificationSergio RicardoОценок пока нет
- 146336888ADM1022 AДокумент21 страница146336888ADM1022 Asantiago moralesОценок пока нет
- Remote Access Identification Device With Integrated 3D Wakeup Receiver and Immobilizer InterfaceДокумент10 страницRemote Access Identification Device With Integrated 3D Wakeup Receiver and Immobilizer InterfacecaptainОценок пока нет
- EDN Design Ideas 1998Документ166 страницEDN Design Ideas 1998chag1956100% (4)
- DP83848C PDFДокумент84 страницыDP83848C PDFpriyosantosaОценок пока нет
- Technical Manual For Enhanced Data Switch Unit (EDSU) : HW Revision 1.2 SW Revision 2.1aДокумент22 страницыTechnical Manual For Enhanced Data Switch Unit (EDSU) : HW Revision 1.2 SW Revision 2.1aJon CornishОценок пока нет
- Serial Communications: ObjectivesДокумент26 страницSerial Communications: ObjectivesAmy OliverОценок пока нет
- ADSST EM 3035 - AnalogDevicesДокумент20 страницADSST EM 3035 - AnalogDevicesDD CoupleОценок пока нет
- Circuit Note: Dual-Channel Colorimeter With Programmable Gain Transimpedance Amplifiers and Digital Synchronous DetectionДокумент8 страницCircuit Note: Dual-Channel Colorimeter With Programmable Gain Transimpedance Amplifiers and Digital Synchronous DetectionfengheОценок пока нет
- Data Sheet: Communication Unit 560CMR01Документ5 страницData Sheet: Communication Unit 560CMR01Mohammed MostefaiОценок пока нет
- Circuit Note: Fully Automatic High Performance Conductivity Measurement SystemДокумент10 страницCircuit Note: Fully Automatic High Performance Conductivity Measurement SystemSupolОценок пока нет
- OBD (PWM) To RS232 Interpreter ELM320: Description FeaturesДокумент16 страницOBD (PWM) To RS232 Interpreter ELM320: Description FeaturesIvan Francisco LorenzattiОценок пока нет
- Pca 9306Документ36 страницPca 9306احسن طاہرОценок пока нет
- How To Set Up UART Communication On The ArduinoДокумент22 страницыHow To Set Up UART Communication On The ArduinojackОценок пока нет
- Ads 7830Документ16 страницAds 7830Alif PratamaОценок пока нет
- 560CMU05 DS enДокумент5 страниц560CMU05 DS enĐồng Nai CTОценок пока нет
- MR44V100A: General DescriptionДокумент19 страницMR44V100A: General DescriptionseacerОценок пока нет
- 12 Adc PDFДокумент17 страниц12 Adc PDFYonathan MoraОценок пока нет
- Adc ArduinoДокумент17 страницAdc ArduinoDalton ColomboОценок пока нет
- Pam Vme: Technical ManualДокумент15 страницPam Vme: Technical ManualZahid JamilОценок пока нет
- Atc-1000 Users Manual v2 0Документ4 страницыAtc-1000 Users Manual v2 0dung110baclieuОценок пока нет
- Data Sheet: Communication Unit 520CMD01Документ5 страницData Sheet: Communication Unit 520CMD01filipeОценок пока нет
- MC33742 PDFДокумент72 страницыMC33742 PDFfraurОценок пока нет
- Tdax140x00 PDFДокумент4 страницыTdax140x00 PDFDavid FuentesОценок пока нет
- Ak09911 PDFДокумент18 страницAk09911 PDFrallu. ralucaОценок пока нет
- Si3226/7 Si3208/9: D P Slic DC-DC CДокумент38 страницSi3226/7 Si3208/9: D P Slic DC-DC CDarwin SipayungОценок пока нет
- Ecee AVR Mega32 - Users ManualДокумент40 страницEcee AVR Mega32 - Users Manualgoaltech100% (1)
- Encendido M-M Autos TC ArgentinaДокумент2 страницыEncendido M-M Autos TC ArgentinaLeandroОценок пока нет
- USB Port Setting Ver.1.0 EngДокумент13 страницUSB Port Setting Ver.1.0 EngLuis CuberoОценок пока нет
- Elm327l DSB PDFДокумент96 страницElm327l DSB PDFSamuel CalabuigОценок пока нет
- ELM327 v2.1Документ94 страницыELM327 v2.1VlasElectronicsОценок пока нет
- Multiple On and Off Time Programmed Industrial Load: Submitted byДокумент24 страницыMultiple On and Off Time Programmed Industrial Load: Submitted byakashОценок пока нет
- RS232Документ26 страницRS232Pratesh Kumar Reddy100% (3)
- AS-Interface Devices: (Slave Modules)Документ48 страницAS-Interface Devices: (Slave Modules)Muhamad PriyatnaОценок пока нет
- VSCA Serial Communications BoardДокумент10 страницVSCA Serial Communications BoardRedaMedОценок пока нет
- Isolated Analog-to-Digital Converters Provide Flexible, Cost-Effective Solutions For AC Line MonitoringДокумент5 страницIsolated Analog-to-Digital Converters Provide Flexible, Cost-Effective Solutions For AC Line Monitoringtrantuan88Оценок пока нет
- DS 2101110-En Af WebДокумент2 страницыDS 2101110-En Af WebadrianioantomaОценок пока нет
- ALC PDH RADIO Technical Training Siae MiДокумент141 страницаALC PDH RADIO Technical Training Siae MiKennedy CostaОценок пока нет
- Toshiba Servo Drive PresentationДокумент24 страницыToshiba Servo Drive PresentationRSX SОценок пока нет
- Hardware and Layout Design Considerations For DDRДокумент48 страницHardware and Layout Design Considerations For DDRmuralikonathamОценок пока нет
- Low Voltage Translation For SPI, UART, RGMII, JTAG InterfacesДокумент15 страницLow Voltage Translation For SPI, UART, RGMII, JTAG InterfacesspotОценок пока нет
- ATC1000 DatasheetДокумент2 страницыATC1000 DatasheetdedyОценок пока нет
- Design of AVR - Based Embedded Ethernet InterfaceДокумент13 страницDesign of AVR - Based Embedded Ethernet Interfacepremsagar483Оценок пока нет
- Hardware: FeaturesДокумент4 страницыHardware: Featuresrajaavikhram3719Оценок пока нет
- ELM327DSДокумент95 страницELM327DSleodarkОценок пока нет
- OBD AT Commnads ELM327DS PDFДокумент94 страницыOBD AT Commnads ELM327DS PDFclick2klic100% (1)
- RS232 422 485 I2c SpiДокумент6 страницRS232 422 485 I2c SpiShen JinWei100% (1)
- 4MO3prnATC-1000 Datasheet V3.1Документ2 страницы4MO3prnATC-1000 Datasheet V3.1manish punjabiОценок пока нет
- PTN 6300 Packet Transport Product Hardware IntroductionДокумент39 страницPTN 6300 Packet Transport Product Hardware IntroductionLovaОценок пока нет
- Rtu - SasДокумент19 страницRtu - SasNitin KumarОценок пока нет
- Eurocod 2Документ358 страницEurocod 2Don Adrián Oniga100% (1)
- Renewing Default Certificates For Tivoli Workload SchedulerДокумент88 страницRenewing Default Certificates For Tivoli Workload SchedulerautomaticitОценок пока нет
- Netflix Ad Supported Tier SpecsДокумент2 страницыNetflix Ad Supported Tier SpecsThiago GonzalesОценок пока нет
- Is - 1865 - 1991Документ13 страницIs - 1865 - 1991sangitaghaisas50% (2)
- 1.1 Industry Profile: Indian Valves Market OutlookДокумент41 страница1.1 Industry Profile: Indian Valves Market OutlookKathir SОценок пока нет
- SakaiДокумент2 страницыSakaiariОценок пока нет
- Huawei LTE Roadmap and Solution For Mobitel (20121220)Документ37 страницHuawei LTE Roadmap and Solution For Mobitel (20121220)Nuwan Chandimal100% (2)
- Checklist Question Support July 2015Документ37 страницChecklist Question Support July 2015Orbán NorbertОценок пока нет
- InterimДокумент10 страницInterimMohamed AzferОценок пока нет
- Maintenance of Your LC and LC-MS SystemДокумент100 страницMaintenance of Your LC and LC-MS Systemdaoruaimibg2Оценок пока нет
- Load Balancing For Multicast Traffic in SDN Using Real-Time Link Cost ModificationДокумент7 страницLoad Balancing For Multicast Traffic in SDN Using Real-Time Link Cost ModificationJohn GreenОценок пока нет
- Grid GIS L3 F35 - 145 - KV 0169 2016 - 07 ENДокумент4 страницыGrid GIS L3 F35 - 145 - KV 0169 2016 - 07 ENiqbalmyОценок пока нет
- Chapter 2 - HSRP PDFДокумент34 страницыChapter 2 - HSRP PDFCao Hồng MinhОценок пока нет
- Console DXB 200Документ98 страницConsole DXB 200Jules Le RisbéОценок пока нет
- ITG-Internal Control MatrixДокумент14 страницITG-Internal Control Matrixbladexdark67% (3)
- Agri Price List 01nov2019Документ40 страницAgri Price List 01nov2019vishnusinghal2007Оценок пока нет
- Sew Euro DriveДокумент5 страницSew Euro DriveTINCHOYAОценок пока нет
- Process Communication Unit PCU400 MR9Документ27 страницProcess Communication Unit PCU400 MR9sahil4INDОценок пока нет
- D5873 Rock Hardness by Rebound Hammer PDFДокумент4 страницыD5873 Rock Hardness by Rebound Hammer PDFRyanYuОценок пока нет
- C-508 Rev 2 - Draft PDFДокумент37 страницC-508 Rev 2 - Draft PDFPravinОценок пока нет
- Hyundai I10Документ29 страницHyundai I10tmonga100% (2)
- 511 Pressure TransmitterДокумент5 страниц511 Pressure TransmitterDhp CiaОценок пока нет
- 582d041blp Jetlan Cat 6 - Futp - 1x4p - Dca & EcaДокумент1 страница582d041blp Jetlan Cat 6 - Futp - 1x4p - Dca & EcaGabriel AngelОценок пока нет
- Introduction To BIODIESELДокумент4 страницыIntroduction To BIODIESELdumi-dumiОценок пока нет
- BVD2034GBДокумент4 страницыBVD2034GBSamehibrahemОценок пока нет
- Pistola CashДокумент12 страницPistola CashSEBASTIAN PEREZОценок пока нет
- MVH S215BT Owners ManualДокумент56 страницMVH S215BT Owners ManualCyberian100% (3)
- BusДокумент24 страницыBusSyed Noman AhmedОценок пока нет
- ME-308 Quality Engineering Dr. Abdul Shakoor Lecture 1 - Quality BasicsДокумент18 страницME-308 Quality Engineering Dr. Abdul Shakoor Lecture 1 - Quality BasicsharoonОценок пока нет
- Pages From ABB Power Factor Correction and Harmonic Filtering in Electrical PlantsДокумент7 страницPages From ABB Power Factor Correction and Harmonic Filtering in Electrical Plantsrajpre1213Оценок пока нет