Вам также может понравиться
- Sensor Lect7Документ42 страницыSensor Lect7morton1472Оценок пока нет
- Vibration Measurement System With Accelerometer Sensor Based On ARM PDFДокумент5 страницVibration Measurement System With Accelerometer Sensor Based On ARM PDFAndreasОценок пока нет
- Chapter 2 Ese246 PDFДокумент96 страницChapter 2 Ese246 PDFMuhamad AmmarОценок пока нет
- AcceleromtereДокумент8 страницAcceleromtereSV TechnologiesОценок пока нет
- Vibration Sensors 2012 PDFДокумент18 страницVibration Sensors 2012 PDFRajesh Sharma100% (1)
- Non Contact Sensor PDFДокумент24 страницыNon Contact Sensor PDFGaurav R AgrawalОценок пока нет
- Sensor Types and ClassificationДокумент40 страницSensor Types and Classificationilkay KOZAK100% (1)
- Describe Different Types of AccelerometersДокумент7 страницDescribe Different Types of AccelerometersRotin PierreОценок пока нет
- 3 Axis AccelerometerДокумент10 страниц3 Axis AccelerometerTechqualcerОценок пока нет
- Signal Flow - Instrument Sensor Transducer PLC - jpg1653x483 56.9 KBДокумент7 страницSignal Flow - Instrument Sensor Transducer PLC - jpg1653x483 56.9 KBsakthisriniОценок пока нет
- Vibration Measurement ProceduresДокумент8 страницVibration Measurement ProceduresEclipse ShuОценок пока нет
- Vibration Measurement ProceduresДокумент8 страницVibration Measurement ProceduresEclipse Shu100% (1)
- Vibration TransducerДокумент7 страницVibration TransducerPrakash Kumar100% (1)
- Altimeter: List of Flight InstrumentsДокумент7 страницAltimeter: List of Flight InstrumentsNima NiassatiОценок пока нет
- TCH05 Inertial SensorsДокумент15 страницTCH05 Inertial SensorsNikhilAgnihotriОценок пока нет
- Vibration MeasurementДокумент5 страницVibration MeasurementHussn YazdanОценок пока нет
- Somali National University: Mechanical Measurement (MM 3609)Документ33 страницыSomali National University: Mechanical Measurement (MM 3609)Omari AdamОценок пока нет
- Semana1 LecturasДокумент228 страницSemana1 LecturasPepi Gomez100% (1)
- GalvanometerДокумент10 страницGalvanometerrahul kumar jha100% (1)
- GroundMotion DSHA-PSHA PDFДокумент232 страницыGroundMotion DSHA-PSHA PDFcristian aОценок пока нет
- Analog Sensors PDFДокумент110 страницAnalog Sensors PDFakozyОценок пока нет
- Mechatronics Notes22Документ23 страницыMechatronics Notes22Arun KumarОценок пока нет
- MAINTOPIC Displacement MeasurementДокумент43 страницыMAINTOPIC Displacement MeasurementLoreto CorderoОценок пока нет
- Sensors and Transducers: Introduction To MechatronicsДокумент32 страницыSensors and Transducers: Introduction To Mechatronicsmann20100% (1)
- Vibration MeasurementДокумент23 страницыVibration MeasurementAxenta100% (2)
- Assignment 1 Technology SensorДокумент12 страницAssignment 1 Technology SensorMuhammad Sufi MustafaОценок пока нет
- T, Then The Range May Be Determined by The SimpleДокумент5 страницT, Then The Range May Be Determined by The SimpleSathiya NarayananОценок пока нет
- Primary Sensor: Characteristic and TypesДокумент41 страницаPrimary Sensor: Characteristic and TypesAshutosh PandeyОценок пока нет
- Unit 5 Displacement, Velocity and Acceleration MeasurementДокумент26 страницUnit 5 Displacement, Velocity and Acceleration Measurementbhuyanuttam7Оценок пока нет
- Sensor Lect9Документ33 страницыSensor Lect9ajayОценок пока нет
- Measurement of Vibration & Axial DisplacementДокумент6 страницMeasurement of Vibration & Axial DisplacementSatОценок пока нет
- Measurement of Force & Torque (20-24)Документ26 страницMeasurement of Force & Torque (20-24)Saif YounusОценок пока нет
- Adaptive Cruise Control: A Seminar Report OnДокумент22 страницыAdaptive Cruise Control: A Seminar Report OnLatha DevarajОценок пока нет
- EEE 432 Measurement and Instrumentation: Sensor TechnologiesДокумент23 страницыEEE 432 Measurement and Instrumentation: Sensor Technologiesshivashankar hiremathОценок пока нет
- Displacement Transducer Types: Eddy Current Based Non-Contact Displacement TransducersДокумент3 страницыDisplacement Transducer Types: Eddy Current Based Non-Contact Displacement TransducersplmzaqqazmlpОценок пока нет
- Physics ProjectДокумент20 страницPhysics Projectkhanirfanpathan389Оценок пока нет
- The Device Layer (Sensors & Actuators) Part OneДокумент35 страницThe Device Layer (Sensors & Actuators) Part Onenoor aliОценок пока нет
- Seismic Instrumentation: 1.1 Mechanical Vertical PendulumДокумент14 страницSeismic Instrumentation: 1.1 Mechanical Vertical PendulumВладимир ДаниловОценок пока нет
- Instrumentation and Measurement Systems: Week 4Документ34 страницыInstrumentation and Measurement Systems: Week 4critestachОценок пока нет
- Industrial Instrumentation I Question Bank 1Документ12 страницIndustrial Instrumentation I Question Bank 1Feroz AhamedОценок пока нет
- Inertial Sensors Exploit The Property of Inertia To Sense Angular Motion (With) and Linear Motion (With)Документ0 страницInertial Sensors Exploit The Property of Inertia To Sense Angular Motion (With) and Linear Motion (With)shahbunafОценок пока нет
- Eddy PiezoДокумент19 страницEddy Piezoshrish ukhalkarОценок пока нет
- UT-1 Equipment and AccessoriesДокумент34 страницыUT-1 Equipment and AccessoriesmangsureshОценок пока нет
- Electric and Magnetic Sensors and ActuatorsДокумент82 страницыElectric and Magnetic Sensors and ActuatorsSunil Kumar HsОценок пока нет
- Topic 10 12 ControlДокумент17 страницTopic 10 12 ControlKsenia Jazrene SanicoОценок пока нет
- Assignment 2Документ10 страницAssignment 2akib khanОценок пока нет
- Synopsis of HallДокумент3 страницыSynopsis of Halldeepjha29Оценок пока нет
- Advances in Fluxgate Sensors: Pavel RipkaДокумент7 страницAdvances in Fluxgate Sensors: Pavel RipkaJose AlaezОценок пока нет
- Hall Effect Transducer BasicsДокумент5 страницHall Effect Transducer BasicsmandhirОценок пока нет
- Effect of Cubic Nonlinearity On Auto-Parametrically Amplified Resonant MEMS Mass SensorДокумент12 страницEffect of Cubic Nonlinearity On Auto-Parametrically Amplified Resonant MEMS Mass Sensorg161803Оценок пока нет
- RNA-LM-130150111076 Hiren.Документ35 страницRNA-LM-130150111076 Hiren.Rahul RanjanОценок пока нет
- 3 Occupancy and Motion Detectors 1Документ33 страницы3 Occupancy and Motion Detectors 1Jaya SankariОценок пока нет
- UNIT-II (Part B)Документ9 страницUNIT-II (Part B)youaremine.696969Оценок пока нет
- Unit-III (B-Part) Electrical Measurement & Measuring Instruments EEE-101/ EEE-201Документ16 страницUnit-III (B-Part) Electrical Measurement & Measuring Instruments EEE-101/ EEE-201Deep ChowdhuryОценок пока нет
- Theory of Operation of Rate SensorsДокумент4 страницыTheory of Operation of Rate SensorsPhạm Ngọc HòaОценок пока нет
- 1.) RESISTIVE SENSORS: The Resistive Sensors Can Be Defined As The Resistance of A Sensor Can BeДокумент3 страницы1.) RESISTIVE SENSORS: The Resistive Sensors Can Be Defined As The Resistance of A Sensor Can BeSanjana SehrawatОценок пока нет
- Sensors & Instrumentation Notes Unit-02Документ47 страницSensors & Instrumentation Notes Unit-02shivangi sharmaОценок пока нет
- Chapter 3Документ48 страницChapter 3Ram Bahadur KhadkaОценок пока нет
- A Hall Effect Sensor Is A Transducer That Varies Its Output Voltage in Response To Changes in Magnetic FieldДокумент2 страницыA Hall Effect Sensor Is A Transducer That Varies Its Output Voltage in Response To Changes in Magnetic FieldusamanajeebОценок пока нет
- Power Measurements Under Nonsinusoidal Conditions : A Thesis in Electrical EngineeringОт EverandPower Measurements Under Nonsinusoidal Conditions : A Thesis in Electrical EngineeringОценок пока нет
- Vaporizer Calibration PDFДокумент1 страницаVaporizer Calibration PDFmorton1472Оценок пока нет
- Policy Themes For Higher Education in Sudan Higher Education Access and EquityДокумент4 страницыPolicy Themes For Higher Education in Sudan Higher Education Access and Equitymorton1472Оценок пока нет
- Engineering Specifications OS Vent1.3Документ2 страницыEngineering Specifications OS Vent1.3morton1472Оценок пока нет
- Mechanical Ventilator: Design and Implementation: Professor Yasser Mostafa KadahДокумент19 страницMechanical Ventilator: Design and Implementation: Professor Yasser Mostafa Kadahmorton1472Оценок пока нет
- Medtronic Shares Ventilation Design Specifications To Accelerate Efforts To Increase Global Ventilator ProductionДокумент1 страницаMedtronic Shares Ventilation Design Specifications To Accelerate Efforts To Increase Global Ventilator Productionmorton1472Оценок пока нет
- Predicción Covid-19Документ1 страницаPredicción Covid-19Alberto CraviotoОценок пока нет
- Giardia BenchaidДокумент2 страницыGiardia BenchaidAnggun Rahmah Muthi'ahОценок пока нет
- FGI BF HealthCareFutures SummaryДокумент11 страницFGI BF HealthCareFutures Summarymorton1472Оценок пока нет
- Syringe Selection Guide: Common Syringe Data - Diameter and Plunger Surface AreaДокумент2 страницыSyringe Selection Guide: Common Syringe Data - Diameter and Plunger Surface Areamorton1472Оценок пока нет
- Infographic Prussian Blue ArДокумент1 страницаInfographic Prussian Blue Armorton1472Оценок пока нет
- Et 2208Документ1 страницаEt 2208morton1472Оценок пока нет
- Flowmeters CourseДокумент382 страницыFlowmeters CourseKah Hom100% (3)
- MPS - HY - 60 ML BD Syringe Now 50 ML - Customer Letter - CL - ENДокумент3 страницыMPS - HY - 60 ML BD Syringe Now 50 ML - Customer Letter - CL - ENmorton1472Оценок пока нет
- Precision Lab Line Water Baths Brochure BRTCPRECLABLINE EN PDFДокумент12 страницPrecision Lab Line Water Baths Brochure BRTCPRECLABLINE EN PDFmorton1472Оценок пока нет
- P0002E LJ Dosing Pumps PDFДокумент24 страницыP0002E LJ Dosing Pumps PDFMorris MorrisonОценок пока нет
- Safer Technologies Program GuidanceДокумент21 страницаSafer Technologies Program Guidancemorton1472Оценок пока нет
- General Water Baths 1Документ4 страницыGeneral Water Baths 1morton1472Оценок пока нет
- Wa0018Документ1 страницаWa0018morton1472Оценок пока нет
- Wa0019Документ1 страницаWa0019morton1472Оценок пока нет
- FGI Patient Handling and Mobility Assessments 191008Документ476 страницFGI Patient Handling and Mobility Assessments 191008morton1472100% (1)
- Filmtec Reverse Osmosis Product Catalog L PDFДокумент121 страницаFilmtec Reverse Osmosis Product Catalog L PDFramadhan8zakirudinОценок пока нет
- Jacobi Aquasorb CS CarbonДокумент2 страницыJacobi Aquasorb CS Carbonmorton1472Оценок пока нет
- 2019 10 03 SudanStakeholderDialogues 0Документ18 страниц2019 10 03 SudanStakeholderDialogues 0morton1472Оценок пока нет
- Medical Devices 2019Документ21 страницаMedical Devices 2019morton1472Оценок пока нет
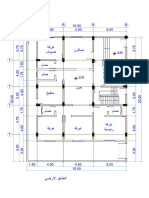
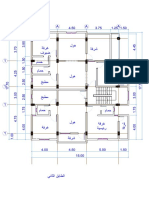
- A A A A: Gspublisherversion 0.65.100.100Документ1 страницаA A A A: Gspublisherversion 0.65.100.100morton1472Оценок пока нет
- 10 1 1 574 3833-١Документ9 страниц10 1 1 574 3833-١morton1472Оценок пока нет
- 10 1 1 574 3833-١Документ9 страниц10 1 1 574 3833-١morton1472Оценок пока нет
- For Guidance For Guidance For Guidance For Guidance: Australasian HFG Standard Components WTPL Water Treatment Plant RoomДокумент1 страницаFor Guidance For Guidance For Guidance For Guidance: Australasian HFG Standard Components WTPL Water Treatment Plant Roommorton1472Оценок пока нет
- CRC Handbook of Ayurvedic Medicinal Plants: L. D. Ka Oor, PH.D., F.I.A.C, F.A.S.PДокумент2 страницыCRC Handbook of Ayurvedic Medicinal Plants: L. D. Ka Oor, PH.D., F.I.A.C, F.A.S.Pmorton1472Оценок пока нет
- Isolation Rooms Final Version V3 Publication 2Документ14 страницIsolation Rooms Final Version V3 Publication 2morton1472Оценок пока нет
- Cantilever Retaining WallДокумент5 страницCantilever Retaining WallAditya Singh ChauhanОценок пока нет
- Vector and Scalar Potentials: Maxwell EquationsДокумент10 страницVector and Scalar Potentials: Maxwell EquationsAbburi KarthikОценок пока нет
- Cooling Water CircuitДокумент3 страницыCooling Water CircuitJamil AhmedОценок пока нет
- Thermodynamics Fundamental PrinciplesДокумент444 страницыThermodynamics Fundamental PrinciplesWilliam Charly Calderon Rosales100% (2)
- Monel 400 Monel K 500Документ2 страницыMonel 400 Monel K 500siddhesh_guessОценок пока нет
- Exp 1-Thermocouple RTD MeasurementДокумент11 страницExp 1-Thermocouple RTD MeasurementMuhammad HaizeeОценок пока нет
- Footing Design CalculationsДокумент5 страницFooting Design CalculationsArnold VercelesОценок пока нет
- HDPEДокумент14 страницHDPESandy YansikuОценок пока нет
- Technical Whitepaper: Sonic V - Acoustic Pulse Reflectometry (APR) Inspection SystemДокумент11 страницTechnical Whitepaper: Sonic V - Acoustic Pulse Reflectometry (APR) Inspection SystemassurendranОценок пока нет
- KDC InstallationДокумент2 страницыKDC InstallationJIANG LUОценок пока нет
- Sheet 1 PED 232 2nd Year 2017Документ2 страницыSheet 1 PED 232 2nd Year 2017MhmdKordyОценок пока нет
- Journal of Luminescence: Monika Mall, Lokendra KumarДокумент6 страницJournal of Luminescence: Monika Mall, Lokendra KumarAzie AzuraОценок пока нет
- Chapter 3 - Liquid-Liquid ExtractionДокумент29 страницChapter 3 - Liquid-Liquid Extractiond20221103362Оценок пока нет
- Majorana Fermions in Condensed Matter Physics: The 1D Nanowire CaseДокумент6 страницMajorana Fermions in Condensed Matter Physics: The 1D Nanowire CaseOscar BohórquezОценок пока нет
- ASCE 7 10 Vs ASCE 7 16 1657453966Документ53 страницыASCE 7 10 Vs ASCE 7 16 1657453966MANOJОценок пока нет
- Die Correction Manual PDFДокумент10 страницDie Correction Manual PDFLUAI BARAKAT100% (3)
- Comparative Study of Moisture Removal Techniques For Mineral-Based Insulation OilДокумент6 страницComparative Study of Moisture Removal Techniques For Mineral-Based Insulation OilDante FilhoОценок пока нет
- Curtis Petroleum Reservoir Fluid PropertiesДокумент6 страницCurtis Petroleum Reservoir Fluid Propertiesbenjamin kenyeryОценок пока нет
- Refraction Through Lenses & Optical Instruments5Документ144 страницыRefraction Through Lenses & Optical Instruments5geniusamahОценок пока нет
- Design Speculations: M-25 Mix Design (By Mass) For Ips-5 (Shastri Nagar), MeerutДокумент3 страницыDesign Speculations: M-25 Mix Design (By Mass) For Ips-5 (Shastri Nagar), MeerutMuneer HaiderОценок пока нет
- Polarography: Pharmaceutical Chemistry IIIB 516-T Course Incharge: Dr. Somia GulДокумент17 страницPolarography: Pharmaceutical Chemistry IIIB 516-T Course Incharge: Dr. Somia GulTayyab Siddiqui100% (1)
- Amte 116LДокумент3 страницыAmte 116LRebecca Lepon LegaspiОценок пока нет
- Sulphur Magazine - Mar-Apr 2013 - Preventing Corrosion in Sulphur Storage TanksДокумент6 страницSulphur Magazine - Mar-Apr 2013 - Preventing Corrosion in Sulphur Storage TanksmarraezОценок пока нет
- Problem 6: Heat Exchange in A Series of TanksДокумент5 страницProblem 6: Heat Exchange in A Series of TanksAbu Bakr Abdul MajeedОценок пока нет
- Bachelor Technology Grade Card (Provisional)Документ1 страницаBachelor Technology Grade Card (Provisional)Mihir Kumar MechОценок пока нет
- Design Parameters in STAADДокумент50 страницDesign Parameters in STAADHussain Mir92% (12)
- Chemsheets AS 1032 Relative RatesДокумент9 страницChemsheets AS 1032 Relative Ratescharlesma123Оценок пока нет
- Mechanism of LubricationДокумент1 страницаMechanism of LubricationsushilОценок пока нет
- FinalДокумент72 страницыFinalRyan FisherОценок пока нет
- Riprap Revetment Ahn Polvi TrabantДокумент10 страницRiprap Revetment Ahn Polvi TrabantdihsadhisahdaОценок пока нет