Вам также может понравиться
- ABB - 4 Biggest MistakesДокумент7 страницABB - 4 Biggest MistakesAnargha BhattacharyaОценок пока нет
- Ultrasonic Surveillance BugДокумент7 страницUltrasonic Surveillance Bugdetroit_me2553Оценок пока нет
- FM JammerДокумент13 страницFM JammerKumar R Ranjan100% (3)
- Landmines Detection Using Radar BulletДокумент31 страницаLandmines Detection Using Radar BulletvasudhaОценок пока нет
- Knight Eod RobotДокумент11 страницKnight Eod RobotDawid KatОценок пока нет
- Ultrasonic Proximity DetectorДокумент55 страницUltrasonic Proximity DetectorSurya Prakash KondabhathiniОценок пока нет
- Ebook Emp Herf Shock Pulse Generators Empplans 400j 1.8gw Plan Gun WeaponДокумент22 страницыEbook Emp Herf Shock Pulse Generators Empplans 400j 1.8gw Plan Gun Weaponarmandoaltomare100% (2)
- FM JammerДокумент21 страницаFM JammerKumar R Ranjan100% (3)
- Solid Rocket MotorДокумент26 страницSolid Rocket Motoranon_149673746Оценок пока нет
- Approach To Unknown Drug OverdoseДокумент3 страницыApproach To Unknown Drug OverdoseRobert So JrОценок пока нет
- Social Engineering PowerДокумент7 страницSocial Engineering Poweranon_634465258Оценок пока нет
- Islamic Terrorist Bomb Attack RefuseingДокумент159 страницIslamic Terrorist Bomb Attack Refuseingares100% (1)
- TNT Trinitrotoluenes and Mono and Dinitrotoluenes PDFДокумент136 страницTNT Trinitrotoluenes and Mono and Dinitrotoluenes PDFmahdiarОценок пока нет
- High Energy Pulser: System DescriptionДокумент14 страницHigh Energy Pulser: System DescriptionBirdy MadОценок пока нет
- Solid Propellant FundamentalsДокумент28 страницSolid Propellant FundamentalsrakeshsakoteОценок пока нет
- OceanStor 5300 V3&5500 V3&5600 V3&5800 V3&6800 V3&6900 V3 Storage System V300R001 Maintenance Guide 06Документ359 страницOceanStor 5300 V3&5500 V3&5600 V3&5800 V3&6800 V3&6900 V3 Storage System V300R001 Maintenance Guide 06Jeerahnon ThanumaiweerakunОценок пока нет
- 2.0 Chemical Security Threats and MitigationДокумент35 страниц2.0 Chemical Security Threats and MitigationLyes OuabdesselamОценок пока нет
- Automatic Sentry GunДокумент2 страницыAutomatic Sentry Gunhimpandey13Оценок пока нет
- Interview QuestionsДокумент1 страницаInterview QuestionsMadhuОценок пока нет
- MySQL Monitoring With ZabbixДокумент47 страницMySQL Monitoring With ZabbixOli SennhauserОценок пока нет
- PostgreSQL Replication - Second Edition - Sample ChapterДокумент27 страницPostgreSQL Replication - Second Edition - Sample ChapterPackt PublishingОценок пока нет
- How to disguise an exe file as a jpg image fileДокумент2 страницыHow to disguise an exe file as a jpg image fileTrance InertiaОценок пока нет
- Procedures and Notes for Medical SpecialtiesДокумент9 страницProcedures and Notes for Medical SpecialtiesKeith CoralОценок пока нет
- Welch Et - Al 95 With Morphine JPharmExpTherДокумент79 страницWelch Et - Al 95 With Morphine JPharmExpTherМатиас Себальос ГусманОценок пока нет
- Bill Ashmanskas - Learning The Art of Electronics: A Hands-On Lab CourseДокумент6 страницBill Ashmanskas - Learning The Art of Electronics: A Hands-On Lab CourseHie TherОценок пока нет
- War ChemistryДокумент364 страницыWar ChemistryAwad SaidОценок пока нет
- Nuclear Radiation Survival GuideДокумент4 страницыNuclear Radiation Survival Guiderolf_brОценок пока нет
- CAPACITORSДокумент23 страницыCAPACITORSmaprofОценок пока нет
- Microbial Synthesis of (R) - and (S) - 3,4 Dimethoxyamphetamines Through Stereoselective TransaminationДокумент4 страницыMicrobial Synthesis of (R) - and (S) - 3,4 Dimethoxyamphetamines Through Stereoselective TransaminationChamula K MasОценок пока нет
- 8017-Taggants in ExplosivesДокумент267 страниц8017-Taggants in Explosiveshaddig8Оценок пока нет
- Question Bank (Pharmacology) Paper No-1 (CNS) : Name The FollowingДокумент25 страницQuestion Bank (Pharmacology) Paper No-1 (CNS) : Name The FollowingAdarshBijapurОценок пока нет
- Glyceryl Trinitrate Ointment As A Potential Treatment For Primary VaginismusДокумент2 страницыGlyceryl Trinitrate Ointment As A Potential Treatment For Primary VaginismusFernando Bonat BarbieriОценок пока нет
- Wireless Repeater RiscoGroupДокумент2 страницыWireless Repeater RiscoGroupprozincoОценок пока нет
- Thermobaric and Enhanced Blast Explosives TBX and Ebx PDFДокумент73 страницыThermobaric and Enhanced Blast Explosives TBX and Ebx PDFnguyenhОценок пока нет
- RFID TechnologyДокумент20 страницRFID TechnologyTamanna ChaudharyОценок пока нет
- CT-4001P CT-40002P Drone Jammers User Manual v.18.01Документ7 страницCT-4001P CT-40002P Drone Jammers User Manual v.18.01Kristina RadosavljevicОценок пока нет
- Cellphone JammerДокумент3 страницыCellphone Jammerneek4uОценок пока нет
- Loperamide Hydrochloride FE7.0Документ3 страницыLoperamide Hydrochloride FE7.0April ClineОценок пока нет
- Esomeprazole Magnesium TrihydrateДокумент2 страницыEsomeprazole Magnesium TrihydrateMulayam Singh YadavОценок пока нет
- Simple GSM JammerДокумент7 страницSimple GSM JammerDalia M-aОценок пока нет
- Cell Phone Jamming ExplainedДокумент81 страницаCell Phone Jamming Explainedbharathimmk100% (1)
- Narcotics Narcotics: Ancient GreekДокумент5 страницNarcotics Narcotics: Ancient GreekWilda Pado RiveraОценок пока нет
- Cyanide PoisoningДокумент23 страницыCyanide PoisoningKeisha ReccionОценок пока нет
- Fentanyl - Duragesic (Analgesic, Narcotic, General Anesthetic)Документ1 страницаFentanyl - Duragesic (Analgesic, Narcotic, General Anesthetic)Danielle Marie SamblacenoОценок пока нет
- Control of Microbial Growth Experiment The Effect of Disinfectants and Antiseptics On Microbial GrowthДокумент4 страницыControl of Microbial Growth Experiment The Effect of Disinfectants and Antiseptics On Microbial GrowthDexter LeeОценок пока нет
- Solar InstallationДокумент6 страницSolar Installationanjali sharmaОценок пока нет
- 433 Mhz RF Transmitter OverviewДокумент4 страницы433 Mhz RF Transmitter OverviewKiran KumarОценок пока нет
- Undergraduate Pathology NotesДокумент77 страницUndergraduate Pathology Notesraul sinatoОценок пока нет
- Simple FM Radio Jammer CircuitДокумент2 страницыSimple FM Radio Jammer CircuitMajid Mehmood0% (1)
- PMAMMO January Update Final Dec30Документ22 страницыPMAMMO January Update Final Dec30abohamoОценок пока нет
- Radiation Safety TechniquesДокумент52 страницыRadiation Safety TechniquesSahil RamtekeОценок пока нет
- Picric AcidДокумент3 страницыPicric AcidAnonymous CXNLTvmОценок пока нет
- Microsoft PowerPoint - High Energy Materials - Introduction (Compatibility Mode)Документ11 страницMicrosoft PowerPoint - High Energy Materials - Introduction (Compatibility Mode)skywarrior124Оценок пока нет
- Scout Regen v1.2.1Документ47 страницScout Regen v1.2.1vimaru88Оценок пока нет
- Anesthesia For Ivf PDFДокумент11 страницAnesthesia For Ivf PDFdr raghav guptaОценок пока нет
- Electromagnetic Interference Causes Effects & MitigationДокумент12 страницElectromagnetic Interference Causes Effects & MitigationsbpathiОценок пока нет
- The Six Step Method of Interpreting EcgsДокумент3 страницыThe Six Step Method of Interpreting EcgsSivakumar Gounden100% (1)
- Explosives Info Sheet PDFДокумент2 страницыExplosives Info Sheet PDFErdnee UlaanОценок пока нет
- The Pharmaceutical Industry and the Future of Drug DevelopmentДокумент33 страницыThe Pharmaceutical Industry and the Future of Drug Developmentعبدالعزيز بدرОценок пока нет
- U3 PIC 18F Microcontroller InterruptsДокумент59 страницU3 PIC 18F Microcontroller Interruptsmadhukar v nimbalkarОценок пока нет
- Microprocessors and Microcontrollers Lab: Title: ComponentsДокумент8 страницMicroprocessors and Microcontrollers Lab: Title: ComponentsGhulam E Muhammad UsmanОценок пока нет
- Introduction To PIC Interrupts and Their Handling in CДокумент41 страницаIntroduction To PIC Interrupts and Their Handling in CveerakumarsОценок пока нет
- Lab ManualДокумент101 страницаLab ManualSRINITHI P EEE KIOTОценок пока нет
- Timer 1 Delay Generation PIC16F877AДокумент8 страницTimer 1 Delay Generation PIC16F877AGhulam E Muhammad UsmanОценок пока нет
- Intreruperi C EmbeddedДокумент6 страницIntreruperi C Embeddedalexandra_popuОценок пока нет
- Lectures IFДокумент110 страницLectures IFselavilizationОценок пока нет
- 4-20 Ma. Cálculo de Distancia MáximaДокумент3 страницы4-20 Ma. Cálculo de Distancia MáximaMarco Antonio Arroyo RiveraОценок пока нет
- CДокумент146 страницCPradeep NaikОценок пока нет
- Safe PLC Controller Implementation IEC 61131-3 Compliant Based On A Simple SAT Solver: Application To Manufacturing SystemsДокумент9 страницSafe PLC Controller Implementation IEC 61131-3 Compliant Based On A Simple SAT Solver: Application To Manufacturing SystemsselavilizationОценок пока нет
- Herbal Preparations How To MakeДокумент5 страницHerbal Preparations How To MakepaulxeОценок пока нет
- E-Commerce The Cutting Edge of BusinessДокумент3 страницыE-Commerce The Cutting Edge of BusinessselavilizationОценок пока нет
- Fishing Knots Tying How To Tie A Knot Knotting PDFДокумент4 страницыFishing Knots Tying How To Tie A Knot Knotting PDFJason PetersОценок пока нет
- Drupal Modules and FeaturesДокумент46 страницDrupal Modules and FeaturesselavilizationОценок пока нет
- Medical - Wilderness Med KitДокумент26 страницMedical - Wilderness Med KitTravis JohnsonОценок пока нет
- Man DbaДокумент109 страницMan DbaselavilizationОценок пока нет
- A Quick Introduction To C++Документ29 страницA Quick Introduction To C++api-27048744Оценок пока нет
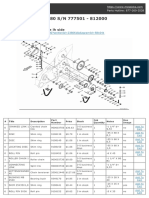
- Comprima V 150 / 180 S/N 777501 - 812000: VENDOR: Krone SECTION: Figure Listing DIAGRAM: 37.0 Chain Drive LH SideДокумент3 страницыComprima V 150 / 180 S/N 777501 - 812000: VENDOR: Krone SECTION: Figure Listing DIAGRAM: 37.0 Chain Drive LH SideselavilizationОценок пока нет
- Welding Feasibility of Copper and Mild Steel Using TIG WeldingДокумент3 страницыWelding Feasibility of Copper and Mild Steel Using TIG WeldingselavilizationОценок пока нет
- StructuredText PDFДокумент5 страницStructuredText PDFArmando RiveraОценок пока нет
- 32601872Документ56 страниц32601872selavilizationОценок пока нет
- Java TetrapackДокумент72 страницыJava TetrapackselavilizationОценок пока нет
- Public Health Passenger Locator Form PDFДокумент1 страницаPublic Health Passenger Locator Form PDFselavilization100% (1)
- L2Документ8 страницL2selavilizationОценок пока нет
- A Dictionary of the Beja LanguageДокумент162 страницыA Dictionary of the Beja LanguageselavilizationОценок пока нет
- Ashish Gandhe, Restaurant Recommendation System PDFДокумент5 страницAshish Gandhe, Restaurant Recommendation System PDFselavilizationОценок пока нет
- Farkas-Eternal EgyptДокумент4 страницыFarkas-Eternal EgyptselavilizationОценок пока нет
- Adison Wongkar, Christoph Wertz, What Are People Saying About Net NeutralityДокумент5 страницAdison Wongkar, Christoph Wertz, What Are People Saying About Net NeutralityselavilizationОценок пока нет
- Grab A SiteДокумент26 страницGrab A SiteselavilizationОценок пока нет
- Andy Sun, Maisy Wieman, Analyzing Vocal Patterns To Determine EmotionДокумент5 страницAndy Sun, Maisy Wieman, Analyzing Vocal Patterns To Determine EmotionGoku MittalОценок пока нет
- Fangzhou Guo, Huaiyang Zhong, Yuchen Li, Learning To Predict Dental Caries For Preschool ChildrenДокумент5 страницFangzhou Guo, Huaiyang Zhong, Yuchen Li, Learning To Predict Dental Caries For Preschool ChildrenselavilizationОценок пока нет
- R. A. Hudson - A Dictionary of Beja (2012) PDFДокумент162 страницыR. A. Hudson - A Dictionary of Beja (2012) PDFselavilizationОценок пока нет
- John Doherty, Predicting Mobile Users Future LocationДокумент5 страницJohn Doherty, Predicting Mobile Users Future LocationselavilizationОценок пока нет
- Abhimanyu Bannerjee, Asha Chigurupati, Identifying Gender From Facial Features PDFДокумент5 страницAbhimanyu Bannerjee, Asha Chigurupati, Identifying Gender From Facial Features PDFNaveen PasupuletiОценок пока нет
- Choosing the Right CS229 ProjectДокумент5 страницChoosing the Right CS229 ProjectselavilizationОценок пока нет
- Constancia Generacion Clave InternetДокумент2 страницыConstancia Generacion Clave InternetSebastian Edson Choquehuanca VillavicencioОценок пока нет
- Carrier Grade Captive Portal Powers Massive Public WiFi NetworkДокумент26 страницCarrier Grade Captive Portal Powers Massive Public WiFi NetworkDavid GasparyanОценок пока нет
- QlikView Server Reference Manual PDFДокумент120 страницQlikView Server Reference Manual PDFDENILSONFNОценок пока нет
- Eikon 4 Upgrade Readiness CheckДокумент15 страницEikon 4 Upgrade Readiness CheckT_HaiderОценок пока нет
- Designated Supplier of China Silk Road-Dunhuang Scenic AreaДокумент2 страницыDesignated Supplier of China Silk Road-Dunhuang Scenic AreaMargarita vargasОценок пока нет
- Access Control - Cisco MerakiДокумент12 страницAccess Control - Cisco MerakiJean Jacques BelyОценок пока нет
- Switching Basics and Intermediate Routing CCNA 3Документ70 страницSwitching Basics and Intermediate Routing CCNA 3Rohit AdhikariОценок пока нет
- Xpanel 20160205Документ11 страницXpanel 20160205Juan LuisОценок пока нет
- Config (Creo Schools) PDFДокумент1 страницаConfig (Creo Schools) PDFhiveОценок пока нет
- (WU NETA 020 ZI) Wireless N USB Network AdapterДокумент4 страницы(WU NETA 020 ZI) Wireless N USB Network Adapternyx1047Оценок пока нет
- Copia de ABB NPCU-01Документ4 страницыCopia de ABB NPCU-01Abraham GalvánОценок пока нет
- Service LogДокумент11 страницService LogAhmed BahriОценок пока нет
- SEM 3 BC0042 1 Operating SystemsДокумент27 страницSEM 3 BC0042 1 Operating Systemsraju_ahmed_37Оценок пока нет
- Lecture 6 Unit2part1Документ49 страницLecture 6 Unit2part1ZeyRoX GamingОценок пока нет
- Converting Your Existing Libraries From CDB To OAДокумент2 страницыConverting Your Existing Libraries From CDB To OAFx5200Оценок пока нет
- AN - MAESTRO - GPS Ephemeris Receiver LoadДокумент24 страницыAN - MAESTRO - GPS Ephemeris Receiver LoadDaniel MartinsОценок пока нет
- Satellite C55-B Detailed Product Specification: Operating Non-OperatingДокумент3 страницыSatellite C55-B Detailed Product Specification: Operating Non-OperatingObed Isai RuizОценок пока нет
- Simatic st80 STPC Chap03 English 2016 PDFДокумент164 страницыSimatic st80 STPC Chap03 English 2016 PDFvoltus88Оценок пока нет
- Monitoring Hosts Using NRPEДокумент2 страницыMonitoring Hosts Using NRPEसुनाम कुमार शर्माОценок пока нет
- Basic PC Shortcut KeysДокумент15 страницBasic PC Shortcut KeysRathinavel Dass100% (1)
- Ingenico Troubleshooting Guide V1.4Документ20 страницIngenico Troubleshooting Guide V1.4Juan CarlosОценок пока нет
- SarafudeenДокумент30 страницSarafudeenLalu KrishОценок пока нет
- Asus Product Guide: Razor-Thin Tablet. Powerful LaptopДокумент21 страницаAsus Product Guide: Razor-Thin Tablet. Powerful LaptopAbdul Halim GhaniОценок пока нет
- Run Application in Intel SGX Enclave (Confidential Computing) - TsmatzДокумент16 страницRun Application in Intel SGX Enclave (Confidential Computing) - TsmatzImran MehdiОценок пока нет
- Using The UVM Libraries With Questa Verification Horizons BLOGДокумент11 страницUsing The UVM Libraries With Questa Verification Horizons BLOGPrashant JainОценок пока нет
- Reverse Engineering For Beginners-En-liteДокумент153 страницыReverse Engineering For Beginners-En-litealfiozzzОценок пока нет