Вам также может понравиться
- Exercícios CompressãoДокумент5 страницExercícios CompressãoRodrigo DuarteОценок пока нет
- Exemplo 8.1 ShigleyДокумент8 страницExemplo 8.1 ShigleyRennan ReneОценок пока нет
- Laudo Insalubridade PericulosidadeДокумент16 страницLaudo Insalubridade PericulosidadeNayana André80% (5)
- Teclado GospelДокумент59 страницTeclado GospelRodrigues Júnior Rodrigues100% (4)
- Portfólio Cálculo Equações DiferenciaisДокумент8 страницPortfólio Cálculo Equações DiferenciaisSergio Fernandes100% (1)
- Escola de Engenharia de Lorena - EEL: P1 - Cálculo de Reatores - EBQ7 - GABARITOДокумент3 страницыEscola de Engenharia de Lorena - EEL: P1 - Cálculo de Reatores - EBQ7 - GABARITOArmando Mateus MoianaОценок пока нет
- Monitoria 3Документ6 страницMonitoria 3Renata OliveiraОценок пока нет
- Aula17 SHS409 2014Документ25 страницAula17 SHS409 2014Denis RamosОценок пока нет
- Formulario P2Документ1 страницаFormulario P2Jean ThomasioОценок пока нет
- Est 55 02 2009Документ79 страницEst 55 02 2009Ricardo TeixeiraОценок пока нет
- Lista 1Документ4 страницыLista 1Vinicius GoulartОценок пока нет
- AFA en EFOMM Prep Simulado en 1 Dia 2 GabaritoДокумент11 страницAFA en EFOMM Prep Simulado en 1 Dia 2 GabaritoGeovana Cid PereiraОценок пока нет
- AULA - 6 - Transiente - Parte 1Документ13 страницAULA - 6 - Transiente - Parte 1DanielPiauОценок пока нет
- Monitoria 2Документ8 страницMonitoria 2Renata OliveiraОценок пока нет
- Modelo Ramsey Cass Koopmans Macro IVДокумент10 страницModelo Ramsey Cass Koopmans Macro IVraphael guimaraesОценок пока нет
- 606Документ10 страниц606Angelo Vargas FloresОценок пока нет
- CEF Aula8 Circuitos CA Gerson PARTE FINALДокумент26 страницCEF Aula8 Circuitos CA Gerson PARTE FINALVanessa SoaresОценок пока нет
- Cópia de Cópia de Moiane J Ninete JoaquimДокумент20 страницCópia de Cópia de Moiane J Ninete JoaquimFrancisco CossaОценок пока нет
- In Certeza SДокумент6 страницIn Certeza SJoão GabrielОценок пока нет
- Experimento FOOO 4Документ3 страницыExperimento FOOO 4Aroldo Bruno Gomes MoreiraОценок пока нет
- Formulação DiscretaДокумент2 страницыFormulação DiscretaCatarinaNevesОценок пока нет
- Lição 3Документ12 страницLição 3Dário JumaОценок пока нет
- Lista 1Документ3 страницыLista 1Julio NunesОценок пока нет
- Aula 9Документ3 страницыAula 9clarinhaquintaОценок пока нет
- Slide Exp. 7 - Cargas e Desc. de CapacitoresДокумент6 страницSlide Exp. 7 - Cargas e Desc. de CapacitoresMarcos do HawaiiОценок пока нет
- COV723 - Hidrodinâmica de Sistemas Oceânicos - Lista 3 - EPFДокумент10 страницCOV723 - Hidrodinâmica de Sistemas Oceânicos - Lista 3 - EPFEvandro F. de Paula FilhoОценок пока нет
- Trabalho A3 Refrigeração e ArДокумент6 страницTrabalho A3 Refrigeração e Argustavo.santijoinvilleОценок пока нет
- Af2 13er CorДокумент3 страницыAf2 13er CorContaОценок пока нет
- Cap 02Документ9 страницCap 02marcos henriqueОценок пока нет
- Azdoc - Tips Apostila de Circuitos Eletricos Capitulo 8Документ30 страницAzdoc - Tips Apostila de Circuitos Eletricos Capitulo 8WilliamОценок пока нет
- Aula-7-Exercicios-Transformações Lineares-Editado-MarciaДокумент18 страницAula-7-Exercicios-Transformações Lineares-Editado-MarciaRolaОценок пока нет
- Aula 20 TD0923Документ35 страницAula 20 TD0923talison silvaОценок пока нет
- Equações Básicas para o Volume de ControleДокумент14 страницEquações Básicas para o Volume de ControleISABELA DE OLIVEIRA PINHEIROОценок пока нет
- Circulo de MohrДокумент1 страницаCirculo de Mohrvanadu55Оценок пока нет
- 06 - Aula 04 - Circuitos de Primeira Ordem - RCДокумент16 страниц06 - Aula 04 - Circuitos de Primeira Ordem - RCClaudio TruffaОценок пока нет
- Capacitores e DielétricosДокумент21 страницаCapacitores e DielétricosRegiane Godoy de LimaОценок пока нет
- Curvas Continuas emДокумент10 страницCurvas Continuas emKuka Da Cesa JoaquimОценок пока нет
- 2012 I Calculo III Lista06Документ11 страниц2012 I Calculo III Lista06Igor Emanuell AlexandreОценок пока нет
- AP1 - Gabarito 2021.1Документ8 страницAP1 - Gabarito 2021.1Mônica Giovana Alves Cardoso RattsОценок пока нет
- Roteiro AДокумент1 страницаRoteiro ARafaelyamiyoОценок пока нет
- Projeto de PMW Com 555Документ4 страницыProjeto de PMW Com 555Danilo Melotti NascimentoОценок пока нет
- Atividades 4 e 5 Física 2Документ6 страницAtividades 4 e 5 Física 2Matheus Oliveira RochaОценок пока нет
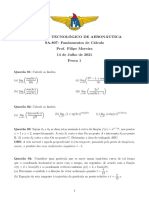
- Questões de Limites e DerivadasДокумент3 страницыQuestões de Limites e DerivadasFilipe MoreiraОценок пока нет
- Capitulo1-Introdução A Cinetica QuimicaДокумент11 страницCapitulo1-Introdução A Cinetica QuimicaTawane Boa Ventura GoettenОценок пока нет
- Revisão Mecanica Do Materiais AplicadaДокумент50 страницRevisão Mecanica Do Materiais AplicadaArquimedes Almeida JuniorОценок пока нет
- Vibrações 22.02.21Документ5 страницVibrações 22.02.21Farmando SatoshiОценок пока нет
- Apresentacao Do Mest. Paulo H. Iscold A. de OliveiraДокумент21 страницаApresentacao Do Mest. Paulo H. Iscold A. de OliveiraKaren JuchenОценок пока нет
- Gabarito Lista4Документ5 страницGabarito Lista4José BarrosОценок пока нет
- Carga e Descarga de CapacitoresДокумент3 страницыCarga e Descarga de CapacitoresCaio BianchiОценок пока нет
- Modelacao Sistemas Hidraulicos Parte IДокумент11 страницModelacao Sistemas Hidraulicos Parte IEderОценок пока нет
- Calor FormulaДокумент2 страницыCalor FormulaninnyОценок пока нет
- Lista 1 - Calc2 Eng - 2020-01Документ4 страницыLista 1 - Calc2 Eng - 2020-01fel198337Оценок пока нет
- Dimensionamentode Sist Hidr 2Документ5 страницDimensionamentode Sist Hidr 2jorgeОценок пока нет
- Lista 8 2021Документ3 страницыLista 8 2021Fábio doPneuОценок пока нет
- Exercicios de Balanceamentos Dinamicos PDFДокумент6 страницExercicios de Balanceamentos Dinamicos PDFJosé Da SilvaОценок пока нет
- (Portfolio) Cálculo 1 - DerivadasДокумент6 страниц(Portfolio) Cálculo 1 - DerivadasAndré BassiОценок пока нет
- Ficha de Exercicios02-1Документ11 страницFicha de Exercicios02-1Edson Da GracaОценок пока нет
- 11354216022012cálculo III Aula 7Документ21 страница11354216022012cálculo III Aula 7Roberto NascimentoОценок пока нет
- Metologia Teste - 2Документ4 страницыMetologia Teste - 2Gabriel WeissОценок пока нет
- 2015-II Seminde - CA NevesДокумент27 страниц2015-II Seminde - CA NevesguilhermeОценок пока нет
- PETR-testes Comprovam Alta Produtividade Da Area de CarcaraДокумент3 страницыPETR-testes Comprovam Alta Produtividade Da Area de CarcaraguilhermeОценок пока нет
- 2015 FIESP - Alte-NevesДокумент59 страниц2015 FIESP - Alte-NevesguilhermeОценок пока нет
- QGEP Termino Carcara Extensao PORT VF2Документ1 страницаQGEP Termino Carcara Extensao PORT VF2guilhermeОценок пока нет
- 2012 SBC Comte Talom ApS 06dex2012 v1Документ27 страниц2012 SBC Comte Talom ApS 06dex2012 v1guilhermeОценок пока нет
- QGEP Indicios Carcara PORT VFДокумент2 страницыQGEP Indicios Carcara PORT VFguilhermeОценок пока нет
- COGESN2011RДокумент23 страницыCOGESN2011RguilhermeОценок пока нет
- Cogesn Relatório de Auditoria de Gestao 2016rДокумент25 страницCogesn Relatório de Auditoria de Gestao 2016rguilhermeОценок пока нет
- ANEXO 2 - Apresentacao Ibama-DilicДокумент25 страницANEXO 2 - Apresentacao Ibama-DilicguilhermeОценок пока нет
- Cogesn Relatório de Auditoria de Gestao 2012rДокумент29 страницCogesn Relatório de Auditoria de Gestao 2012rguilhermeОценок пока нет
- Amazul Relatorio de Gestao - 2014Документ69 страницAmazul Relatorio de Gestao - 2014guilhermeОценок пока нет
- Aragao PDFДокумент53 страницыAragao PDFguilhermeОценок пока нет
- Amazul - Relatorio Adm 2017-2016 NetДокумент58 страницAmazul - Relatorio Adm 2017-2016 NetguilhermeОценок пока нет
- Cogesn - Relatório de Auditoria de Gestao 2014rДокумент28 страницCogesn - Relatório de Auditoria de Gestao 2014rguilhermeОценок пока нет
- Ruep 2015 - Antecedentes Do Acordo Nuclear 374-1021-1-PbДокумент12 страницRuep 2015 - Antecedentes Do Acordo Nuclear 374-1021-1-PbguilhermeОценок пока нет
- PROSUB Análise Da PP Pedro 2015dez15 PDFДокумент278 страницPROSUB Análise Da PP Pedro 2015dez15 PDFguilhermeОценок пока нет
- Relatorio Ministerial Marinha 1937-38-39Документ3 страницыRelatorio Ministerial Marinha 1937-38-39guilhermeОценок пока нет
- Eee54pnriquecimento de Urânio No BrasilДокумент22 страницыEee54pnriquecimento de Urânio No BrasilguilhermeОценок пока нет
- Eee90final-Pga5 Desenvolvimento Da Energia Nuclear - Minas e o BrasilДокумент84 страницыEee90final-Pga5 Desenvolvimento Da Energia Nuclear - Minas e o BrasilguilhermeОценок пока нет
- TD ProsubДокумент10 страницTD ProsubguilhermeОценок пока нет
- Cooperação Nuclear - Brasil-AlemanhaДокумент135 страницCooperação Nuclear - Brasil-AlemanhaHeinz001Оценок пока нет
- Prosub - Uma Política Pública 649-1587-1-SmДокумент29 страницProsub - Uma Política Pública 649-1587-1-SmguilhermeОценок пока нет
- Acordo Nuclear Brasil-Alemanha Federal de 1975 - O Desafio Brasileiro Na Estratégia de Soberania Internacional - de Souza - AEDOSДокумент7 страницAcordo Nuclear Brasil-Alemanha Federal de 1975 - O Desafio Brasileiro Na Estratégia de Soberania Internacional - de Souza - AEDOSguilhermeОценок пока нет
- Ed I Cao Impress A 291012Документ36 страницEd I Cao Impress A 291012guilhermeОценок пока нет
- Martins Filho - Visoes - Civis - Sobre - o - Submarino - Nuclear - Brasileiro PDFДокумент17 страницMartins Filho - Visoes - Civis - Sobre - o - Submarino - Nuclear - Brasileiro PDFguilhermeОценок пока нет
- O Programa Prosub Uma Analise Sobre A Sua Importancia para Soberania Do Estado BrasileiroДокумент16 страницO Programa Prosub Uma Analise Sobre A Sua Importancia para Soberania Do Estado BrasileiroguilhermeОценок пока нет
- FGV - Acordo Militar Brasil-EUAДокумент3 страницыFGV - Acordo Militar Brasil-EUAguilhermeОценок пока нет
- FGV - Acordo Militar Brasil-EUAДокумент3 страницыFGV - Acordo Militar Brasil-EUAguilhermeОценок пока нет
- O Programa Prosub Uma Analise Sobre A Sua Importancia para Soberania Do Estado BrasileiroДокумент16 страницO Programa Prosub Uma Analise Sobre A Sua Importancia para Soberania Do Estado BrasileiroguilhermeОценок пока нет
- Mec Solos Exercícios ResolvidosДокумент6 страницMec Solos Exercícios ResolvidosMariluce DoriaОценок пока нет
- AmvДокумент6 страницAmvf_778206304100% (1)
- A Topologia Do Sujeito e Sua ErrânciaДокумент19 страницA Topologia Do Sujeito e Sua ErrânciaRenato Vieira FilhoОценок пока нет
- Problemas de MDC e MMCДокумент1 страницаProblemas de MDC e MMCGerson Teixeira de OliveiraОценок пока нет
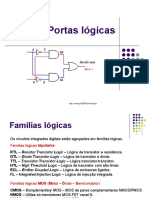
- Portas LogicasДокумент15 страницPortas LogicasAnderson VertuanОценок пока нет
- Prisma Matemática Sugestão de CronogramaДокумент8 страницPrisma Matemática Sugestão de CronogramaLuciana BitencourtОценок пока нет
- Relatório Eletricidade 03Документ13 страницRelatório Eletricidade 03Filipe Ewerton PintoОценок пока нет
- Lugares Geomet ResolДокумент14 страницLugares Geomet ResolMara GomesОценок пока нет
- Aula2. MENU 2021Документ7 страницAula2. MENU 2021Rafael GustavoОценок пока нет
- Ficha de Trabalho-Indicadores Demográficos-8ºanoДокумент2 страницыFicha de Trabalho-Indicadores Demográficos-8ºanomanjosme361775% (32)
- 001 - EProvasOficiais - GeometriaanaliticaДокумент13 страниц001 - EProvasOficiais - Geometriaanaliticapimentinha77Оценок пока нет
- Tabela Verdade Tautologia Contradicao ContingenciaДокумент5 страницTabela Verdade Tautologia Contradicao ContingenciadenistonerОценок пока нет
- Fontes em Latex PDFДокумент7 страницFontes em Latex PDFLeiteantonioОценок пока нет
- ABNT 12102 - Solo Controle de Compactação HILFДокумент25 страницABNT 12102 - Solo Controle de Compactação HILFEngtec Barragán100% (3)
- Lista10-Cinematica de Corpo RigidoДокумент5 страницLista10-Cinematica de Corpo RigidoPedro SchuchterОценок пока нет
- Exercicios Gerais 1 PDFДокумент44 страницыExercicios Gerais 1 PDFGerson Pompeu100% (2)
- Unidade II - LimitesДокумент30 страницUnidade II - LimitesMarcos Antonio Batista GonçalvesОценок пока нет
- Puc Minas Virtual - Jonas LachiniДокумент12 страницPuc Minas Virtual - Jonas LachiniJeanne PassosОценок пока нет
- Cálculo I - Problemas de OtimizaçãoДокумент47 страницCálculo I - Problemas de OtimizaçãoLuis Henrique BaroniОценок пока нет
- Resolucao ProvadeMatematica Vestibular Unicamp 2013 Fase2Документ9 страницResolucao ProvadeMatematica Vestibular Unicamp 2013 Fase2Rogério CardosoОценок пока нет
- Risco Sistemático e Risco Não SistemáticoДокумент3 страницыRisco Sistemático e Risco Não Sistemáticowell_wyldeОценок пока нет
- Abstração PDFДокумент4 страницыAbstração PDFGeraldo HillesheimОценок пока нет
- Curso de Algebra Linear UspДокумент7 страницCurso de Algebra Linear UspgustavoОценок пока нет
- Lance de EscadaДокумент8 страницLance de Escadaosmar.portela8926Оценок пока нет
- V2 Apostila Instrutor Fundamentos de IAДокумент27 страницV2 Apostila Instrutor Fundamentos de IARicardoОценок пока нет
- 3a Prova Pesquisa Operacional Nome Do Aluno e SobrenomeДокумент18 страниц3a Prova Pesquisa Operacional Nome Do Aluno e SobrenomeRenan De limaОценок пока нет
- Apostila TecladoДокумент43 страницыApostila Tecladoimrmartins1Оценок пока нет