Вам также может понравиться
- Automatic Room Temperature Controlled Fan Using Arduino Uno MicrocontrollerДокумент14 страницAutomatic Room Temperature Controlled Fan Using Arduino Uno Microcontrollerkiros negash100% (1)
- Speaking System For Mute PeopleДокумент3 страницыSpeaking System For Mute PeopleBitasta BardhanОценок пока нет
- Automatic Door Opener Using Motion SensorДокумент9 страницAutomatic Door Opener Using Motion SensorHussain Lagua0% (1)
- Automated Door OpenerДокумент15 страницAutomated Door OpenerMuheeb100% (1)
- Micro Controller Based Digital Visitor CounterДокумент33 страницыMicro Controller Based Digital Visitor Counterprathameshas90Оценок пока нет
- Health Monitoring GloveДокумент7 страницHealth Monitoring GloveYashОценок пока нет
- Chapter One: Smart City SolutionsДокумент27 страницChapter One: Smart City Solutionssnehal sabnisОценок пока нет
- Home Automation System Using ArduinoДокумент5 страницHome Automation System Using ArduinoKayeОценок пока нет
- Project Presentation PDFДокумент22 страницыProject Presentation PDFARIF KANONОценок пока нет
- Temperature and Humidity Monitoring and Automation ReportДокумент31 страницаTemperature and Humidity Monitoring and Automation Reportprakash pantaОценок пока нет
- Ultrasonic Distance Meter 1Документ21 страницаUltrasonic Distance Meter 1Naseef Parambattu PalliyaliОценок пока нет
- Arduino ReportДокумент10 страницArduino ReportSrinan MarvelОценок пока нет
- PDF - Next Step Home Automatio Final Paper 150919Документ6 страницPDF - Next Step Home Automatio Final Paper 150919Dr. Pinki Yadav YadavОценок пока нет
- Rotating Solar Inverter Project Using Microcontroller 50WДокумент4 страницыRotating Solar Inverter Project Using Microcontroller 50Whamed raza0% (1)
- Major ProjectДокумент21 страницаMajor ProjectChitra OberoyОценок пока нет
- Bidirectional Visitor Counter With Security System and Automated Room Light ControllerДокумент4 страницыBidirectional Visitor Counter With Security System and Automated Room Light ControllerInternational Journal of Innovative Science and Research TechnologyОценок пока нет
- Automatic Visitor Counter and Light SwitchingДокумент57 страницAutomatic Visitor Counter and Light SwitchingLea Jean ConsigoОценок пока нет
- Final Project Report of LabДокумент7 страницFinal Project Report of LabDuniya AОценок пока нет
- Control and Notification Automatic Water Pump With Arduino and SMS GatewayДокумент6 страницControl and Notification Automatic Water Pump With Arduino and SMS Gatewaylena cpaОценок пока нет
- Automatic Door Open System With Visitor Counter Using ARDUINO UNOДокумент7 страницAutomatic Door Open System With Visitor Counter Using ARDUINO UNORana AqdasОценок пока нет
- Human Following Robot-2 PDFДокумент7 страницHuman Following Robot-2 PDFSUDEEPTA CHANDRA PAULОценок пока нет
- Accident Prevention System Using Driver Drowsiness DetectionДокумент5 страницAccident Prevention System Using Driver Drowsiness DetectionInternational Journal of Innovative Science and Research TechnologyОценок пока нет
- Home Automation System Using Embedded SystemДокумент8 страницHome Automation System Using Embedded SystemHaardik GuptaОценок пока нет
- Fingerprint Based Door Access System Using Arduino: August 2020Документ6 страницFingerprint Based Door Access System Using Arduino: August 2020Aramae DagamiОценок пока нет
- Motion Sensor For Security Light Using Pir SensorДокумент3 страницыMotion Sensor For Security Light Using Pir SensorSamaira Shahnoor Parvin100% (1)
- Intelligent System For Toxic Gas Detection Using GSMДокумент36 страницIntelligent System For Toxic Gas Detection Using GSMstalin882657% (7)
- Automatic Staircase LightningДокумент23 страницыAutomatic Staircase LightningAniket Pawar100% (3)
- LM35 PLC PDFДокумент5 страницLM35 PLC PDFsawanОценок пока нет
- Ultrasonic Navigation System For The BlindДокумент41 страницаUltrasonic Navigation System For The BlindGagandeep SinghОценок пока нет
- 20.motion Based Automatic Door OpenerДокумент16 страниц20.motion Based Automatic Door OpenerKelvin Ceejay100% (1)
- Gourav Sharma - GSM Based Fuel Theft Detection, Overspeed Indicator Nad Temprature Alert System in Petroleum Transportation VehicleДокумент19 страницGourav Sharma - GSM Based Fuel Theft Detection, Overspeed Indicator Nad Temprature Alert System in Petroleum Transportation VehicleRaj MandloiОценок пока нет
- Android Based Bluetooth Door Lock Using Arduino PDF Documentation PDFДокумент1 страницаAndroid Based Bluetooth Door Lock Using Arduino PDF Documentation PDFRendel NalanganОценок пока нет
- Controlling of AC Lamp Dimmer Through Mobile Phone: FeaturesДокумент2 страницыControlling of AC Lamp Dimmer Through Mobile Phone: FeaturesHari KishorОценок пока нет
- Intelligent Traffic Control System For Smart AmbulanceДокумент16 страницIntelligent Traffic Control System For Smart AmbulanceShivendu PandeyОценок пока нет
- Street Light Automation Using IoTДокумент43 страницыStreet Light Automation Using IoTAshwin100% (1)
- Smart BridgeДокумент14 страницSmart BridgeaqeelОценок пока нет
- DHT11 Humidity SensorДокумент12 страницDHT11 Humidity Sensortech agentОценок пока нет
- Magnetic Door Alarm Circuit-Using Hall SensorДокумент12 страницMagnetic Door Alarm Circuit-Using Hall Sensor2K19-EC-004 Aakash Soni100% (1)
- IR Remote Controlled Home Automation Using ArduinoДокумент10 страницIR Remote Controlled Home Automation Using ArduinoAar Arafat50% (2)
- Digital Clock Using 8051 Microcontroller With RTCДокумент47 страницDigital Clock Using 8051 Microcontroller With RTCsiddharthОценок пока нет
- Automatic Room Temperature Controller Using ArduinoДокумент3 страницыAutomatic Room Temperature Controller Using ArduinoVinayaga ProjectinstituteОценок пока нет
- Smart Blind Stick Project ReportДокумент15 страницSmart Blind Stick Project ReportAnkit Tripathi100% (1)
- Passive Infrared SensorДокумент3 страницыPassive Infrared Sensorhim1234567890Оценок пока нет
- Iotbased HomeautomationДокумент13 страницIotbased HomeautomationFahad aliОценок пока нет
- Laser Security System: A Mini Project ONДокумент11 страницLaser Security System: A Mini Project ONRama KrishnaОценок пока нет
- Sensor Lab Mini Project PresentationДокумент14 страницSensor Lab Mini Project PresentationBhavesh SonjeОценок пока нет
- Voice Based Notice Board Using Android ApplicationДокумент17 страницVoice Based Notice Board Using Android ApplicationBiswajitОценок пока нет
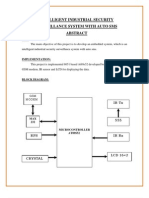
- Intelligent Industrial Security Surveillance System With Auto SmsДокумент3 страницыIntelligent Industrial Security Surveillance System With Auto SmsMamatha MarriОценок пока нет
- Arduino Based Heart Beat SensorДокумент21 страницаArduino Based Heart Beat SensorSandeep KumarОценок пока нет
- Ultrasonic SensorДокумент7 страницUltrasonic SensorCLAS COACHINGОценок пока нет
- Pce Mini Project Report: "RF Transmitter and Receiver"Документ9 страницPce Mini Project Report: "RF Transmitter and Receiver"sumit sanchetiОценок пока нет
- Automatic Room Light Controller With Visitor CounterДокумент2 страницыAutomatic Room Light Controller With Visitor CounterdiwakarlpuОценок пока нет
- Accelerometer Based Hand Gesture Controlled Robot Using ArduinoДокумент10 страницAccelerometer Based Hand Gesture Controlled Robot Using ArduinoRaj AryanОценок пока нет
- Mini Project Report On Automatic Room LiДокумент35 страницMini Project Report On Automatic Room LiRamishОценок пока нет
- Line Follower Robot Using ArduinoДокумент5 страницLine Follower Robot Using ArduinoJesus Eduardo Campos ArcosОценок пока нет
- Arduino DocumentationДокумент27 страницArduino DocumentationHarries Rill MacalatanОценок пока нет
- PPTДокумент14 страницPPTAnil RaghuvaranОценок пока нет
- A Line Follower Robo With Security Sensor: Techno India Project ReportДокумент18 страницA Line Follower Robo With Security Sensor: Techno India Project ReportAnurag KumarОценок пока нет
- Final ProposalДокумент13 страницFinal ProposalAzizОценок пока нет
- Automatic Vacuum Cleaner: Ministry of Higher Education Herat University Engineering Faculty Mechatronics DepartmentДокумент13 страницAutomatic Vacuum Cleaner: Ministry of Higher Education Herat University Engineering Faculty Mechatronics DepartmentAziz KhaliliОценок пока нет
- Internship Report GuidelineДокумент17 страницInternship Report GuidelineDerrick ThamОценок пока нет
- MEE5206 Assignment 1 QuestionsДокумент13 страницMEE5206 Assignment 1 QuestionsDerrick ThamОценок пока нет
- Project Management and Project DevelopmentДокумент2 страницыProject Management and Project DevelopmentDerrick ThamОценок пока нет
- Case Study Essay FormatДокумент2 страницыCase Study Essay FormatDerrick ThamОценок пока нет
- Module 2 Planning 3 Lecture Fundamentals Urban Planning PDF LECTUREДокумент44 страницыModule 2 Planning 3 Lecture Fundamentals Urban Planning PDF LECTUREGrace PabicoОценок пока нет
- T7335A BCDE SeriesДокумент18 страницT7335A BCDE SeriesCosmin RoboОценок пока нет
- ASCE 7-10 - Tabla4-1 - Minimum Uniformly Distributed Live Loads PDFДокумент4 страницыASCE 7-10 - Tabla4-1 - Minimum Uniformly Distributed Live Loads PDFAlvaro Jaen Kravarovic100% (1)
- Revised Indian Standard List After 30 March 2019Документ2 страницыRevised Indian Standard List After 30 March 2019Prashant MankarОценок пока нет
- Assignment ELEVATORДокумент7 страницAssignment ELEVATORRenzo LopezОценок пока нет
- BASF - APE System PDFДокумент86 страницBASF - APE System PDFrendroedywibowoОценок пока нет
- Design and Optimization of Exhaust Muffler in Automobiles: M.Rajasekhar Reddy, DR K.Madhava ReddyДокумент4 страницыDesign and Optimization of Exhaust Muffler in Automobiles: M.Rajasekhar Reddy, DR K.Madhava ReddyMUHAMMAD WAQASОценок пока нет
- CAT C4.4 Stop Solenoid For Marine GeneratorsДокумент4 страницыCAT C4.4 Stop Solenoid For Marine Generatorsharikrishnanpd3327Оценок пока нет
- Comparison of Switching Strategies For An Ultrasonic Cleaner PDFДокумент5 страницComparison of Switching Strategies For An Ultrasonic Cleaner PDFBogdan HaiducОценок пока нет
- 3RD Time Table-25-07-2011Документ33 страницы3RD Time Table-25-07-2011Abhi9777354837Оценок пока нет
- Pernos SwellexДокумент2 страницыPernos SwellexDJSAGAОценок пока нет
- Beckman PycnometerДокумент3 страницыBeckman PycnometerJim Marnoch100% (1)
- Ceramics Final TestДокумент6 страницCeramics Final Testapi-253532405100% (1)
- Ethernet Cable: Color-Code StandardsДокумент3 страницыEthernet Cable: Color-Code StandardsCristian ParaschivОценок пока нет
- Catalogo Hino 700 - ZF 16s151Документ54 страницыCatalogo Hino 700 - ZF 16s151Lucio Pando100% (2)
- Pamplet Cube Press CBR MarДокумент18 страницPamplet Cube Press CBR MarMauridi KaminyuОценок пока нет
- RTHD Catalog RLC Prc020 enДокумент32 страницыRTHD Catalog RLC Prc020 enCharles Lee50% (2)
- Boys Gas CalorimeterДокумент10 страницBoys Gas CalorimeterAbood Al-atiyatОценок пока нет
- Artis 3Документ3 страницыArtis 3Hans CohnОценок пока нет
- Labor Cost Productivity RateДокумент29 страницLabor Cost Productivity RateMary John Paul BetontaОценок пока нет
- 0117 - Fand and Coil Modelo 10 Yhbc Marca YorkДокумент16 страниц0117 - Fand and Coil Modelo 10 Yhbc Marca YorkBlackdragon86Оценок пока нет
- Ba TP17-TPM-Multi en PDFДокумент44 страницыBa TP17-TPM-Multi en PDFHINAОценок пока нет
- Hydraulic and Pneumatic PDFДокумент44 страницыHydraulic and Pneumatic PDFDeekshaОценок пока нет
- Pi GEA Omni en-US 1.1 tcm25-27710Документ62 страницыPi GEA Omni en-US 1.1 tcm25-27710Edgar Joel Torres OlórteguiОценок пока нет
- Control Strategies For Milking Parlor Clean in Place PDFДокумент6 страницControl Strategies For Milking Parlor Clean in Place PDFGrant russellОценок пока нет
- Understanding The ANSI-AMCA Standard 500-L TestsДокумент10 страницUnderstanding The ANSI-AMCA Standard 500-L TestsronnelОценок пока нет
- ISA TR98.00.02 - Skill Standards For Control System TechniciansДокумент22 страницыISA TR98.00.02 - Skill Standards For Control System Techniciansjuanjovm77Оценок пока нет
- Pressure Table-Nvk Portion IsolatedДокумент42 страницыPressure Table-Nvk Portion IsolatedVasanthakumarОценок пока нет
- Construction of FacadesДокумент5 страницConstruction of FacadesGunjan UttamchandaniОценок пока нет
- Alcohol Textbook 4th EdДокумент448 страницAlcohol Textbook 4th Edres06suc94% (16)