Вам также может понравиться
- Powerflex 20-Comm-R Remote I/O Adapter: User ManualДокумент128 страницPowerflex 20-Comm-R Remote I/O Adapter: User ManualMaria TzagarakiОценок пока нет
- Powerflex 20-Comm-P Profibus Adapter: User ManualДокумент112 страницPowerflex 20-Comm-P Profibus Adapter: User ManualBenell ReyesОценок пока нет
- Asrock Motherboard ManualДокумент72 страницыAsrock Motherboard ManualcornbreadsoapgirlОценок пока нет
- Alivenf7g Fullhd r1.0Документ57 страницAlivenf7g Fullhd r1.0pedrojbgОценок пока нет
- Stratix 5700: Switch ConfigurationДокумент20 страницStratix 5700: Switch Configurationdedy250591Оценок пока нет
- USER MANUAL Falcon IP Kit (PDFDrive)Документ46 страницUSER MANUAL Falcon IP Kit (PDFDrive)rootОценок пока нет
- h370 Pro4Документ96 страницh370 Pro4michele.paierОценок пока нет
- Pcchips P29GДокумент53 страницыPcchips P29GmasgОценок пока нет
- 990FX Extreme3: User ManualДокумент68 страниц990FX Extreme3: User ManualSam NickoОценок пока нет
- ASRock 970 Pro3 R2.0 User ManualДокумент70 страницASRock 970 Pro3 R2.0 User ManualJinx686Оценок пока нет
- CnMaestro On-Premises Quick Start 1.4.0Документ38 страницCnMaestro On-Premises Quick Start 1.4.0Muhammad Syafriel Cupriel SiCuphuОценок пока нет
- Asrock n68c-Gs4 FXДокумент56 страницAsrock n68c-Gs4 FXteo2005Оценок пока нет
- Ceragon Fibeair RFU-CДокумент93 страницыCeragon Fibeair RFU-CZakia OuertaniОценок пока нет
- ASRock A75M-ITX User ManualДокумент57 страницASRock A75M-ITX User ManualtheycallmefizzyОценок пока нет
- 760GM GS3Документ58 страниц760GM GS3Dinca IonutОценок пока нет
- Juniper Networks: Polycom VIEW Certified Configuration GuideДокумент93 страницыJuniper Networks: Polycom VIEW Certified Configuration GuideAmol BargeОценок пока нет
- ASRock Z77 Extreme4 User ManualДокумент79 страницASRock Z77 Extreme4 User ManualMarian BucurОценок пока нет
- Ceragon-IP10E CLH ANSI Product Description PDFДокумент108 страницCeragon-IP10E CLH ANSI Product Description PDFJeandelaSagesseОценок пока нет
- Impinj XArray XSpan Installation and Operations Guide 6.4Документ59 страницImpinj XArray XSpan Installation and Operations Guide 6.4Rayhan IyanОценок пока нет
- ProSAFE Plus Utility User Manual 26aug16Документ51 страницаProSAFE Plus Utility User Manual 26aug16IT TEAMОценок пока нет
- Holybro Kopis2 6S ManualДокумент43 страницыHolybro Kopis2 6S ManualMarek BalcerekОценок пока нет
- N68C-GS FX / N68C-S FX: User ManualДокумент54 страницыN68C-GS FX / N68C-S FX: User Manualmikelo tolipОценок пока нет
- ASRock 939A785GMH Users ManualДокумент57 страницASRock 939A785GMH Users ManualHusein AbuОценок пока нет
- Atmel 42723 AVR Dragon UserGuideДокумент62 страницыAtmel 42723 AVR Dragon UserGuideDorel Contrra100% (1)
- Sport PilotДокумент63 страницыSport PilotMarioRossiОценок пока нет
- SupermicroДокумент108 страницSupermicroHeverson RomanoОценок пока нет
- P45R2000-Wifi / P45R2000 / P45Turbotwins2000: User ManualДокумент74 страницыP45R2000-Wifi / P45R2000 / P45Turbotwins2000: User ManualadsonghiОценок пока нет
- 4CoreN73PV-HD720p R3.0Документ54 страницы4CoreN73PV-HD720p R3.0Payo MachОценок пока нет
- PCChips P23G v3 Manual PDFДокумент53 страницыPCChips P23G v3 Manual PDFfranco saul francoОценок пока нет
- H61M-PS4 / H61M-VG4 / H61M-VS4: User ManualДокумент66 страницH61M-PS4 / H61M-VG4 / H61M-VS4: User ManualNesil AbieraОценок пока нет
- Node Plus User ManualДокумент26 страницNode Plus User ManualCtk TrescientosОценок пока нет
- Gyro CompassДокумент40 страницGyro CompassOkan TaktakoğluОценок пока нет
- 990FX Extreme3: User ManualДокумент68 страниц990FX Extreme3: User ManualastartngОценок пока нет
- SK720 ManualДокумент43 страницыSK720 ManualrandyromОценок пока нет
- RS700 Um enДокумент218 страницRS700 Um entokamid711Оценок пока нет
- Enet At007 - en PДокумент94 страницыEnet At007 - en PAkshay AryaОценок пока нет
- User Manual For R2 R4 R2E - V2.6 - EnglishДокумент86 страницUser Manual For R2 R4 R2E - V2.6 - EnglishAnonymous FgCGCPAgОценок пока нет
- H55M Pro: User ManualДокумент60 страницH55M Pro: User ManualIoan TopolaiescuОценок пока нет
- P4M800 Pro-M7: Downloaded From Manuals Search EngineДокумент31 страницаP4M800 Pro-M7: Downloaded From Manuals Search EnginealexОценок пока нет
- MNL 0727Документ104 страницыMNL 0727esasoft3Оценок пока нет
- Enet Um001 - en PДокумент148 страницEnet Um001 - en PMauricio Infante0% (1)
- Raymarine Rc435i ManualДокумент128 страницRaymarine Rc435i ManualGeorgios PapakostasОценок пока нет
- GE Fanuc Automation: Programmable Control ProductsДокумент291 страницаGE Fanuc Automation: Programmable Control ProductsSong KcОценок пока нет
- 970 Extreme3: User ManualДокумент64 страницы970 Extreme3: User ManualAlustorОценок пока нет
- Manual Fag Top-Laser Equilign Manual enДокумент103 страницыManual Fag Top-Laser Equilign Manual enOrlando MarucaОценок пока нет
- 970 Extreme3: User ManualДокумент64 страницы970 Extreme3: User ManualtomiosОценок пока нет
- EtherNet/IP Embedded Switch TechnologyДокумент94 страницыEtherNet/IP Embedded Switch TechnologyGianfranco VentrescaОценок пока нет
- Manual TetraCon IQ DigitalДокумент30 страницManual TetraCon IQ DigitalleonardoОценок пока нет
- FM2A75 Pro4-MДокумент86 страницFM2A75 Pro4-MmariomitteОценок пока нет
- P4Dual 915GLДокумент37 страницP4Dual 915GLHusa FlaviuОценок пока нет
- H61M-PS4 / H61M-VG4 / H61M-VS4: User ManualДокумент66 страницH61M-PS4 / H61M-VG4 / H61M-VS4: User ManualtxaskoОценок пока нет
- Using Aspect-Oriented Programming for Trustworthy Software DevelopmentОт EverandUsing Aspect-Oriented Programming for Trustworthy Software DevelopmentРейтинг: 3 из 5 звезд3/5 (1)
- An 619Документ63 страницыAn 619WayanSudianaОценок пока нет
- S I 5 3 5 1 A / B / C - BДокумент41 страницаS I 5 3 5 1 A / B / C - BAndrzej JurczyńskiОценок пока нет
- MUON CAPTURE FOR THE FRONT END OF A μ+-μ- COLLIDER PDFДокумент3 страницыMUON CAPTURE FOR THE FRONT END OF A μ+-μ- COLLIDER PDFAndrzej JurczyńskiОценок пока нет
- HP 8648 Universal Counter - ManualДокумент106 страницHP 8648 Universal Counter - ManualAndrzej JurczyńskiОценок пока нет
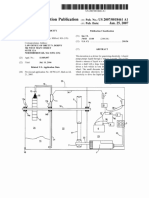
- United States: (12) Patent Application Publication (10) Pub. No.: US 2007/0018461 A1Документ6 страницUnited States: (12) Patent Application Publication (10) Pub. No.: US 2007/0018461 A1Andrzej JurczyńskiОценок пока нет
- Directional Coupler ZFDC-20-3+Документ1 страницаDirectional Coupler ZFDC-20-3+Andrzej JurczyńskiОценок пока нет
- Muon CaptureДокумент25 страницMuon CaptureAndrzej JurczyńskiОценок пока нет
- MUON CAPTURE FOR THE FRONT END OF A μ+-μ- COLLIDER PDFДокумент3 страницыMUON CAPTURE FOR THE FRONT END OF A μ+-μ- COLLIDER PDFAndrzej JurczyńskiОценок пока нет
- Toroidal Iron Powder CoresДокумент21 страницаToroidal Iron Powder CoresAnonymous vKD3FG6RkОценок пока нет
- N12electricalexperi05gern PDFДокумент76 страницN12electricalexperi05gern PDFAndrzej JurczyńskiОценок пока нет
- N 1 Electrical Experi 05 GernДокумент84 страницыN 1 Electrical Experi 05 Gerntomtom545Оценок пока нет
- Polarizing MicroscopeДокумент28 страницPolarizing MicroscopePhotoArtistОценок пока нет
- QAV ZMR 250 Assembly Build Guide: Discord - Free Voice and Text Chat For GamersДокумент17 страницQAV ZMR 250 Assembly Build Guide: Discord - Free Voice and Text Chat For GamersAndrzej JurczyńskiОценок пока нет
- Naze32 Rev6 Manual v1.2Документ30 страницNaze32 Rev6 Manual v1.2Zeiler Ribes SantiagoОценок пока нет
- Philips 32PFL3403D-27 - Manual y Circuito Chasis TPM1.2UДокумент62 страницыPhilips 32PFL3403D-27 - Manual y Circuito Chasis TPM1.2URoberto GeselinoОценок пока нет
- Arduino Style Guide For Writing Libraries: Search The Arduino WebsiteДокумент4 страницыArduino Style Guide For Writing Libraries: Search The Arduino WebsiteAJBROSОценок пока нет
- Kerala electrical contractors license classes A, B, C requirementsДокумент2 страницыKerala electrical contractors license classes A, B, C requirementsJayaprakash GОценок пока нет
- Owner's Manual: Bridgeable Power AmplifierДокумент64 страницыOwner's Manual: Bridgeable Power AmplifiervanderleySCLОценок пока нет
- CCIE Data Center Cheat Sheet TitleДокумент4 страницыCCIE Data Center Cheat Sheet TitleNapster KingОценок пока нет
- MSR18TДокумент3 страницыMSR18TMuhammad Purbo SantosoОценок пока нет
- II B. Tech Signals and Systems Exam QuestionsДокумент8 страницII B. Tech Signals and Systems Exam QuestionsbharadwajОценок пока нет
- IIEE Guide For The Design and Installation of ServiceДокумент51 страницаIIEE Guide For The Design and Installation of ServiceJoel Remegio100% (1)
- Yokogawa Flow Meter GS01R04B04-00E-EДокумент32 страницыYokogawa Flow Meter GS01R04B04-00E-Edhanu_lagwankarОценок пока нет
- CH01 COA9eДокумент16 страницCH01 COA9eimagayoОценок пока нет
- Java Fire Alarm SystemДокумент3 страницыJava Fire Alarm SystemKomal KashyapОценок пока нет
- Egm 60 AfДокумент4 страницыEgm 60 Afأبو زينب المهندسОценок пока нет
- Measuring refractive index of liquids using hollow prismДокумент11 страницMeasuring refractive index of liquids using hollow prismkanishkaranОценок пока нет
- Parameter Editor Manual V1.1Документ10 страницParameter Editor Manual V1.1MAQUINAX7Оценок пока нет
- HHO - DL Phase Lock Loop Parts PDFДокумент3 страницыHHO - DL Phase Lock Loop Parts PDFМарко Сајић0% (1)
- SideWinder 2 1Документ39 страницSideWinder 2 1castor_ulrichОценок пока нет
- Kinetic 5700 Driver ConnectorsДокумент144 страницыKinetic 5700 Driver ConnectorsSamuel OliveiraОценок пока нет
- Arcode Parameter Manual.V120.enДокумент39 страницArcode Parameter Manual.V120.enjnwz28ykkwОценок пока нет
- STGW50H65DFB2 4Документ15 страницSTGW50H65DFB2 4shivguptaОценок пока нет
- Build An Esr Meter For Your Test BenchДокумент14 страницBuild An Esr Meter For Your Test BenchPatrik1968Оценок пока нет
- CzoneДокумент2 страницыCzoneKhairun NisaqОценок пока нет
- Air Conditioning MIKEHOLTДокумент1 страницаAir Conditioning MIKEHOLTWilliamОценок пока нет
- TransformersДокумент43 страницыTransformersDavid LeviОценок пока нет
- LCR-Meter ElektorДокумент5 страницLCR-Meter ElektorFernando VidalОценок пока нет
- Elnet GR User Manual PDFДокумент85 страницElnet GR User Manual PDFStyler2Оценок пока нет
- Frequency Domain FiltersДокумент43 страницыFrequency Domain FiltersRakesh InaniОценок пока нет
- 22.IGBT Based Close Loop Speed Control of Universal MotorДокумент3 страницы22.IGBT Based Close Loop Speed Control of Universal MotorANAND KRISHNANОценок пока нет
- Nvdimm Vs DimmДокумент25 страницNvdimm Vs DimmmanОценок пока нет
- Wevj 08 00327 PDFДокумент12 страницWevj 08 00327 PDFsatyavartguptaОценок пока нет
- NEET 2023 Set-E5 Answer KeyДокумент29 страницNEET 2023 Set-E5 Answer KeyChristopher NolanОценок пока нет