Вам также может понравиться
- Small Dynamos and How to Make Them - Practical Instruction on Building a Variety of Machines Including Electric MotorsОт EverandSmall Dynamos and How to Make Them - Practical Instruction on Building a Variety of Machines Including Electric MotorsОценок пока нет
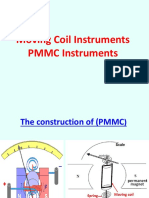
- PMMC MeasurementДокумент97 страницPMMC Measurementkiller raoОценок пока нет
- Practical Transformer Handbook: for Electronics, Radio and Communications EngineersОт EverandPractical Transformer Handbook: for Electronics, Radio and Communications EngineersРейтинг: 4 из 5 звезд4/5 (16)
- Topic 2a DC and Ac Meter - Templete Jke PPDДокумент30 страницTopic 2a DC and Ac Meter - Templete Jke PPDmunОценок пока нет
- Types of InstrumentsДокумент33 страницыTypes of InstrumentsAbdul Noman AbbasiОценок пока нет
- Eee225 02Документ20 страницEee225 02Djirangmor JosephОценок пока нет
- Eee225 02-1Документ39 страницEee225 02-1Djirangmor JosephОценок пока нет
- Mi Unit IiДокумент131 страницаMi Unit IiNithish kumar RajendranОценок пока нет
- Chapter TwoДокумент69 страницChapter Twohaileasrat4Оценок пока нет
- Lecture 3 I&M Electromechanical Indicating Instrument 1Документ18 страницLecture 3 I&M Electromechanical Indicating Instrument 1Asad Saeed0% (1)
- Unit-2: Different Types of Ammeter & VoltmeterДокумент30 страницUnit-2: Different Types of Ammeter & VoltmeterPatel DipenОценок пока нет
- TOPIC 2A Measurement DevicesДокумент24 страницыTOPIC 2A Measurement DevicesBryan MatthiasОценок пока нет
- Modul CO2 - 2Документ91 страницаModul CO2 - 2icyblaze azriyОценок пока нет
- 9 Chapter - 4 PMMC Instruments Part 2 19062023 051614pmДокумент40 страниц9 Chapter - 4 PMMC Instruments Part 2 19062023 051614pmAbdullah ZamirОценок пока нет
- EE 3204 Lec 01Документ31 страницаEE 3204 Lec 01earl pannilaОценок пока нет
- Measuring InstrumentsДокумент36 страницMeasuring InstrumentsGurram Jithin100% (1)
- EE 465 Lecture 8Документ25 страницEE 465 Lecture 8hshjxcbzОценок пока нет
- PMMCДокумент66 страницPMMCEvoque YTОценок пока нет
- D'Arsonval MovementДокумент9 страницD'Arsonval Movementneha yarrapothuОценок пока нет
- Sicx1003 Unit 3Документ37 страницSicx1003 Unit 3sharadasandyaraniОценок пока нет
- Chapter 2 GamalДокумент66 страницChapter 2 GamalJerc ZajОценок пока нет
- InstrumentsДокумент22 страницыInstrumentsmaheshboobalanОценок пока нет
- Chapter 2 - DC Meter PDFДокумент75 страницChapter 2 - DC Meter PDFMuhammad Izz IzzuddinОценок пока нет
- Energy MeterДокумент11 страницEnergy MeterRushab SirsatОценок пока нет
- Energy MeterДокумент11 страницEnergy MeterRushab SirsatОценок пока нет
- Eee 207 - Chapter 5 & 6Документ36 страницEee 207 - Chapter 5 & 6Naija RonaldoОценок пока нет
- Chapter 4 - DC MachineДокумент82 страницыChapter 4 - DC Machinepsksiva13Оценок пока нет
- AmmeterДокумент12 страницAmmeterSunilkumarОценок пока нет
- Unit - Iv: Energy Audit Instruments and Energy Efficient MotorsДокумент16 страницUnit - Iv: Energy Audit Instruments and Energy Efficient MotorsNmg KumarОценок пока нет
- Lecture Notes 03Документ29 страницLecture Notes 03stephen562001Оценок пока нет
- Introduction To DC MachineДокумент134 страницыIntroduction To DC MachineBharat SinghОценок пока нет
- Chapter 2 and 3: by HenokДокумент52 страницыChapter 2 and 3: by Henokenok henaОценок пока нет
- Unit - IIДокумент35 страницUnit - IIthota nagajyothiОценок пока нет
- BEE (21EEE15A) Module 3BДокумент49 страницBEE (21EEE15A) Module 3BG46Anand P KОценок пока нет
- 2 BasicsIntroduction To Electromechanical RelaysДокумент26 страниц2 BasicsIntroduction To Electromechanical RelaysArpon BoseОценок пока нет
- Mod 1Документ39 страницMod 1hkaruvathilОценок пока нет
- EE312L Research WorkДокумент20 страницEE312L Research WorkJohn Carl TiburcioОценок пока нет
- 2 - Universal MotorДокумент31 страница2 - Universal MotorFariba IslamОценок пока нет
- Electrical Actuation SystemsДокумент54 страницыElectrical Actuation Systemsprashant_cool_4_uОценок пока нет
- Lecture 3 Ammeter VoltemeterДокумент43 страницыLecture 3 Ammeter VoltemeterBaderartОценок пока нет
- Introduction To DC Machine: by Dr. Shubhobrata RudraДокумент129 страницIntroduction To DC Machine: by Dr. Shubhobrata RudraBhabani sankar KishanОценок пока нет
- Types of Instruments: What Is Meant by ?Документ42 страницыTypes of Instruments: What Is Meant by ?Anushya RavikumarОценок пока нет
- Induction MachineДокумент82 страницыInduction Machinefakeacc04aОценок пока нет
- Engineering Aspects of Sensors - ActuatorsДокумент66 страницEngineering Aspects of Sensors - ActuatorsShemsudin AhmedteibОценок пока нет
- UNIT 2-Electrical and Electronic InstrumentsДокумент148 страницUNIT 2-Electrical and Electronic InstrumentsPoornima AОценок пока нет
- Measuring Instrument: A Device Used ToДокумент34 страницыMeasuring Instrument: A Device Used ToGnanavel GОценок пока нет
- Lecture 7Документ22 страницыLecture 7Malik YousafОценок пока нет
- EDM - Wattmeter - PPTX Filename - UTF-8''EDM WattmeterДокумент10 страницEDM - Wattmeter - PPTX Filename - UTF-8''EDM WattmeterULFAT HUSSAINОценок пока нет
- Unit 4. Asynchronous (Or Induction) MachinesДокумент40 страницUnit 4. Asynchronous (Or Induction) MachinesAgustinBenedictoОценок пока нет
- Chapter 3Документ71 страницаChapter 3WatashiNoОценок пока нет
- Mechatronics: Electrical Actuation SystemsДокумент32 страницыMechatronics: Electrical Actuation SystemsKARTHIK S SОценок пока нет
- Dynamo PartsДокумент25 страницDynamo Partskathy shiОценок пока нет
- Lecture Notes 03Документ29 страницLecture Notes 03Abdul Hakeem Semar KamaluddinОценок пока нет
- Bee Unit-4Документ49 страницBee Unit-4Aarush PitlaОценок пока нет
- Type of RelaysДокумент26 страницType of Relaysdivyanshu_eedОценок пока нет
- KeywordsДокумент19 страницKeywordsSingam SridharОценок пока нет
- 4-Moving Coil Instruments Fall 2017Документ23 страницы4-Moving Coil Instruments Fall 2017AHMED BAKRОценок пока нет
- Line Frequency But Also in The Lower Audio Frequency RangeДокумент14 страницLine Frequency But Also in The Lower Audio Frequency RangeNmg KumarОценок пока нет
- Variable Reluctance TachogeneratorsДокумент7 страницVariable Reluctance TachogeneratorsvarunshastryОценок пока нет
- Creating A Network With Subnets in OpnetДокумент2 страницыCreating A Network With Subnets in Opnetmohsin AwanОценок пока нет
- Triggering Circuit For Thyristors.: Project ProposalДокумент9 страницTriggering Circuit For Thyristors.: Project Proposalmohsin AwanОценок пока нет
- Lab # 5 Introduction To Cisco Io'S (Configuration of Console Port)Документ6 страницLab # 5 Introduction To Cisco Io'S (Configuration of Console Port)mohsin AwanОценок пока нет
- Lecture 8Документ30 страницLecture 8mohsin AwanОценок пока нет
- Lab Task # 3: TitleДокумент2 страницыLab Task # 3: Titlemohsin AwanОценок пока нет
- Lab Task # 4: TitleДокумент2 страницыLab Task # 4: Titlemohsin AwanОценок пока нет
- Thermo Lec 4Документ32 страницыThermo Lec 4mohsin AwanОценок пока нет
- Lab Task # 2: TitleДокумент2 страницыLab Task # 2: Titlemohsin AwanОценок пока нет
- Lab Task # 1: TitleДокумент2 страницыLab Task # 1: Titlemohsin AwanОценок пока нет
- Mohsin Javed (16pwele4865)Документ21 страницаMohsin Javed (16pwele4865)mohsin AwanОценок пока нет
- Physics Electrostatic Potential CapacitanceДокумент14 страницPhysics Electrostatic Potential CapacitancerkОценок пока нет
- Heat & Mass TransferДокумент69 страницHeat & Mass TransferRamnarayan Meena100% (2)
- 8th Edition - Thermodynamics 40Документ1 страница8th Edition - Thermodynamics 40Ooi Chia EnОценок пока нет
- Free Fall and Equations of MotionДокумент1 страницаFree Fall and Equations of MotionWeteachОценок пока нет
- Harmonic Mitigation in Voltage Source Converters Based HVDC System Using 12-Pulse AC-DC ConvertersДокумент6 страницHarmonic Mitigation in Voltage Source Converters Based HVDC System Using 12-Pulse AC-DC ConvertersHelvécioCaldeiraJuniorОценок пока нет
- AQA A2 Physics A Chapter 8 Textbook AnswersДокумент7 страницAQA A2 Physics A Chapter 8 Textbook Answerscathylister100% (3)
- Sinusoidal Permanent Magnet AC Drives, Load-Commutated-Inverter Synchronous Motor Drives, and Synchronous GeneratorsДокумент23 страницыSinusoidal Permanent Magnet AC Drives, Load-Commutated-Inverter Synchronous Motor Drives, and Synchronous GeneratorshariОценок пока нет
- Model UT602/603: OPERATING MANUAL Model UT602/603: OPERATING MANUALДокумент1 страницаModel UT602/603: OPERATING MANUAL Model UT602/603: OPERATING MANUALNachoОценок пока нет
- MCQ On InductanceДокумент3 страницыMCQ On InductanceAyesha TariqОценок пока нет
- Potential Energy and Conservation of EnergyДокумент39 страницPotential Energy and Conservation of Energy張耀恩Оценок пока нет
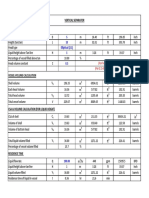
- Vertical Separator Input: 5 10 Elliptical (2:1) 1Документ2 страницыVertical Separator Input: 5 10 Elliptical (2:1) 1Veera ManiОценок пока нет
- Paper Friction Johan91a PDFДокумент9 страницPaper Friction Johan91a PDFYessieОценок пока нет
- Reactive Power CompensationДокумент8 страницReactive Power CompensationAnas ShaikhОценок пока нет
- Module 03 Part 2Документ25 страницModule 03 Part 2Aviation World100% (1)
- A Comprehensive Review of Vibration Energy Harvesting System and Comparison Between Piezo-Eletric and Electromagnetic Energy HarvestersДокумент10 страницA Comprehensive Review of Vibration Energy Harvesting System and Comparison Between Piezo-Eletric and Electromagnetic Energy HarvestersNavraj SinghОценок пока нет
- Lecture Powerpoints: Physics For Scientists and Engineers, With Modern Physics, 4 EditionДокумент40 страницLecture Powerpoints: Physics For Scientists and Engineers, With Modern Physics, 4 EditionMuhammad HarisОценок пока нет
- 169 P5 SolДокумент11 страниц169 P5 SolSagir Musa SaniОценок пока нет
- Astm E96 PDFДокумент14 страницAstm E96 PDFstevenОценок пока нет
- Is 4894 StandardДокумент21 страницаIs 4894 StandardDhruv ModiОценок пока нет
- Lesson 1 Mass Density Osunero, Kim John S. BSED 2D SCIE 4Документ7 страницLesson 1 Mass Density Osunero, Kim John S. BSED 2D SCIE 4Kim John OsuneroОценок пока нет
- Arihant AIEEE PhysicsДокумент376 страницArihant AIEEE Physicssachchidanandpatel50% (4)
- Chapter 3Документ9 страницChapter 3Sivasankaran GanesanОценок пока нет
- Thermo LQ3Документ2 страницыThermo LQ3Su-ho HanОценок пока нет
- Phasor Diagram of Transformer On Inductive LoadДокумент1 страницаPhasor Diagram of Transformer On Inductive LoadRema JayОценок пока нет
- Grade 6 Elevate Science Workbook - 86500313 - 225 - 2022519533Документ63 страницыGrade 6 Elevate Science Workbook - 86500313 - 225 - 2022519533satbooks30Оценок пока нет
- Btech Ce 3 Sem Engineering Mechanics Kce 301 2023Документ4 страницыBtech Ce 3 Sem Engineering Mechanics Kce 301 2023HS EDITZОценок пока нет
- Specific Heat: Einstein's Theory of Specific Heat of A SolidДокумент5 страницSpecific Heat: Einstein's Theory of Specific Heat of A SolidAvadhut ManageОценок пока нет
- Model Question Paper Engineering Electromagnetics (Em) - 1Документ3 страницыModel Question Paper Engineering Electromagnetics (Em) - 1Rahul ThumarОценок пока нет
- Reviewer For General Physics 2Документ3 страницыReviewer For General Physics 2Ezel MayОценок пока нет